انکودر دوار (Rotary Encoder) یا انکودر شفت (Shaft Encoder) یک دستگاه الکترومکانیکی برای تشخیص زاویه یا سرعت زاویهای یک شفت یا محور است. به صورت کلی دو نوع انکودر از نظر جنس خروجی داده وجود دارد:
انکودر مطلق (Absolute Encoder)
این نوع از انکودر قادر به تشخیص موقعیت زاویهای است.
انکودر افزایشی (Incremental Encoder)
این نوع از انکودر تنها قادر به تشخیص سرعت زاویهای است. با این وجود با انتگرالگیری یا مشتقگیری از خروجی آن میتوان موقعیت زاویهای یا شتاب زاویهای را محاسبه کرد.
انکودر دوار در محدودهی وسیعی از سیستمهای مانیتورینگ یا سیستمهای کنترلی حلقه بسته استفاده میشود. منظور از سیستمهای مانیتورینگ ابزاری هستند که تنها برای نمایش مجموعهای از دادهها استفاده میشوند. اما در سیستمهای کنترلی حلقه بسته هدف کنترل یک یا چند پارامتر با اندازهگیری (فیدبک گرفتن) تعدادی از پارامترهای سیستم است. به عنوان مثال اودومتر استفاده شده در اتومبیلهای قدیمی از انکودر نصب شده روی شفتهای متصل به چرخها تنها برای نمایش سرعت اتومبیل یا کیلومتر پیمایش شده استفاده میشود (مانیتورینگ). در مقابل در اتومبیلهایی که دارای قابلیت کروز کنترل هستند از دادهی انکودر چرخها برای اندازهگیری سرعت اتومبیل به منظور رسیدن به سرعت مطلوب و حفظ آن استفاده میشود (کنترل حلقه بسته).
از نظر تکنولوژی ساخت انواع مختلفی از انکودر وجود دارد. که در ادامه به صورت مختصر به معرفی آنها پرداخته میشود.
انکودر دوار مکانیکی
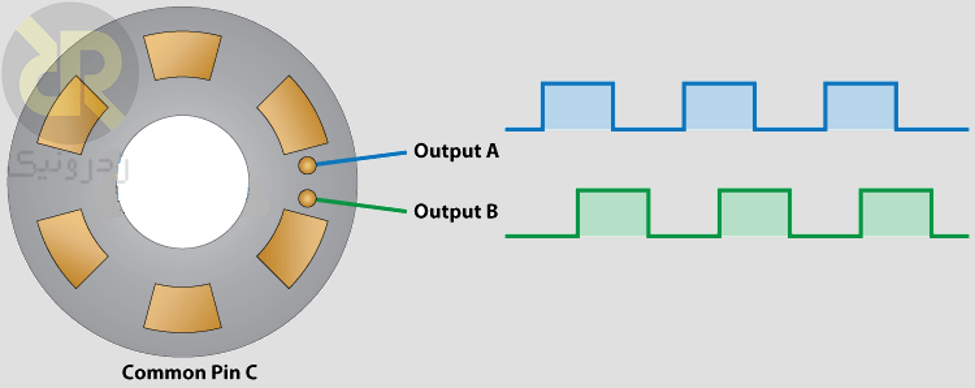
این نوع از انکودرها شامل دیسکی از PCB دارای تِرَکهای مسی در دور تا دور PCB هستند (پین Common). پینهای A و B متصل به شفت دوار هستند و با حرکت چرخشی و اتصال به پین Common موجی مربعی را تشکیل میدهند.
ساختار انکودر مکانیکی
با شمارش لبههای بالاروندهی یکی از سیگنالهای A یا B میتوان موقعیت زاویهای شفت را به دست آورد. هر چه در صفحهی دیسک تعداد بیشتری از قطاعهای مسی وجود داشته باشد، تعداد بیشتری موج مربعی در یک دور کامل تولید میشود که منجر به کاهش رزولوشن انکودر خواهد شد.
علت وجود دو پین A و B به دو دلیل است:
با شمارش لبههای بالاروندهی هر دو سیگنال، تعداد شمارش لبهها در یک دور کامل دو برابر میشود، بنابراین میتوان رزولوشن دو برابر کاهش داد.
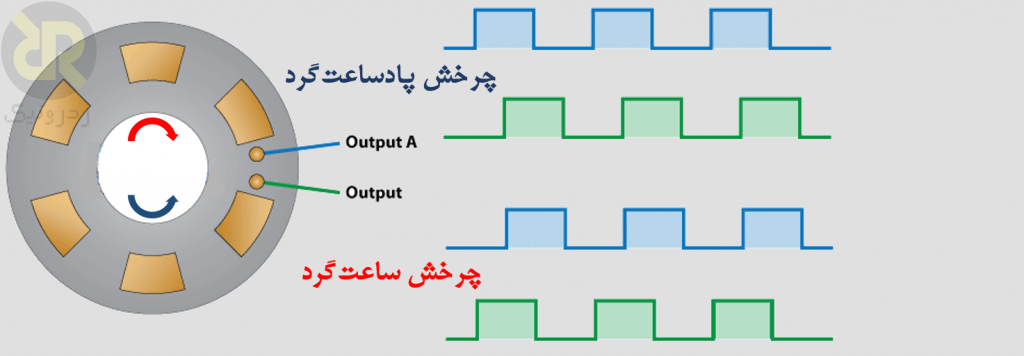
تقدم تشکیل لبهی بالاروندهی یک سیگنال نسبت به دیگری جهت چرخش را مشخص میکند. در شکل بالا در صورتی که شفت (که به پینهای A و B متصل است) در خلاف جهت عقربههای ساعت بچرخد، ابتدا لبهی بالارونده در سیگنال A مشاهده میشود سپس در سیگنال B. در حالتی که حرکت شفت در جهت عقربههای ساعت باشد لبهی بالارونده در سیگنال B به لبهی بالارونده در سیگنال A تقدم دارد.
تشخیص جهت چرخش انکودر
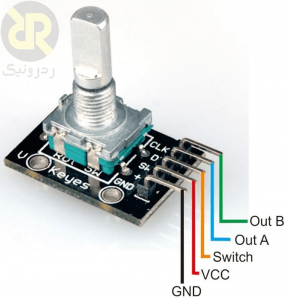
یک نمونه انکودر دوار مکانیکی در شکل زیر نشان داده شده است.
نمونهای از انکودر مکانیکی
اصلیترین ایراد این نوع انکودر دوار ایجاد سایش مکانیکی و فرسودگی آنها در اثر استفاده مکرر است.
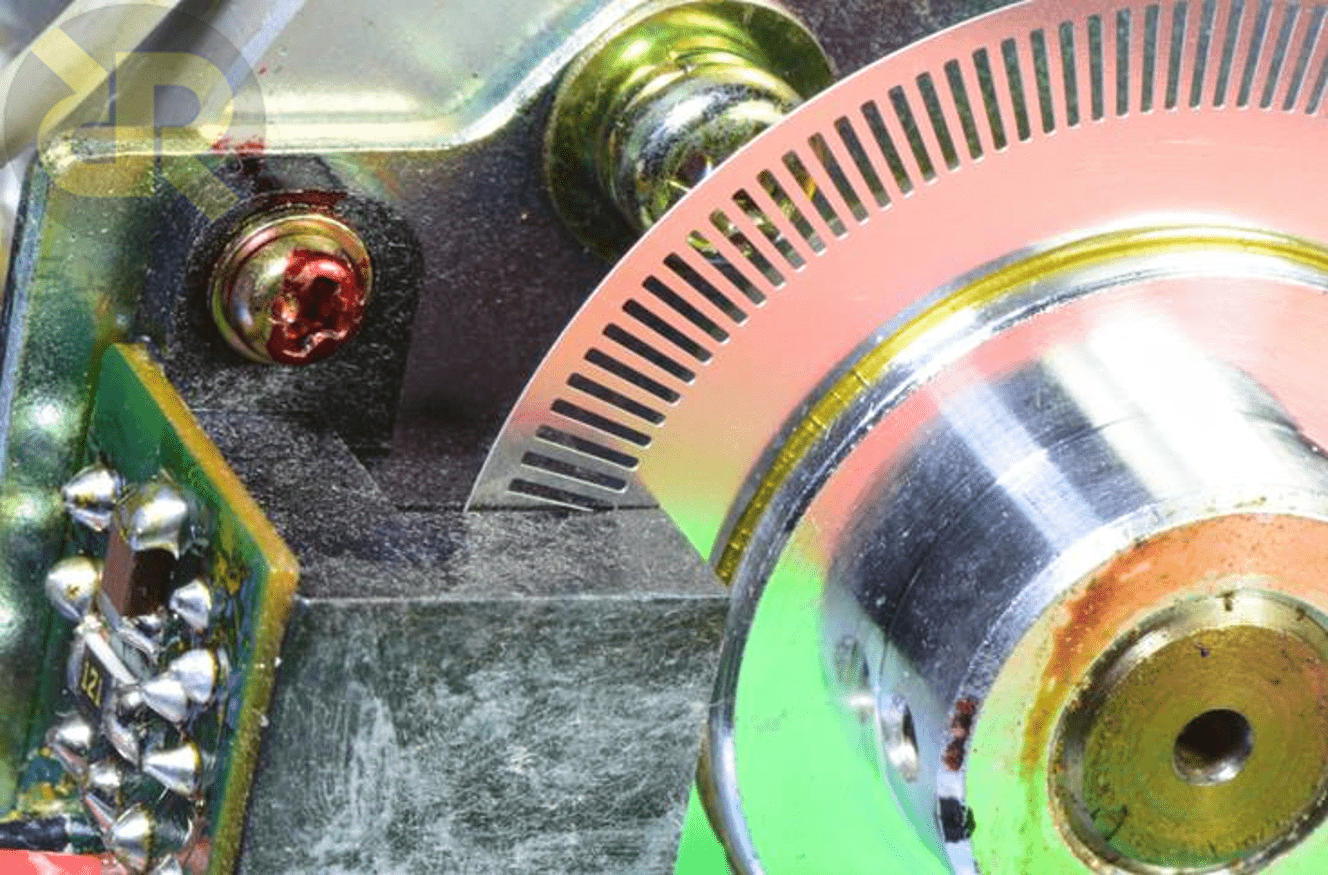
انکودر دوار نوری
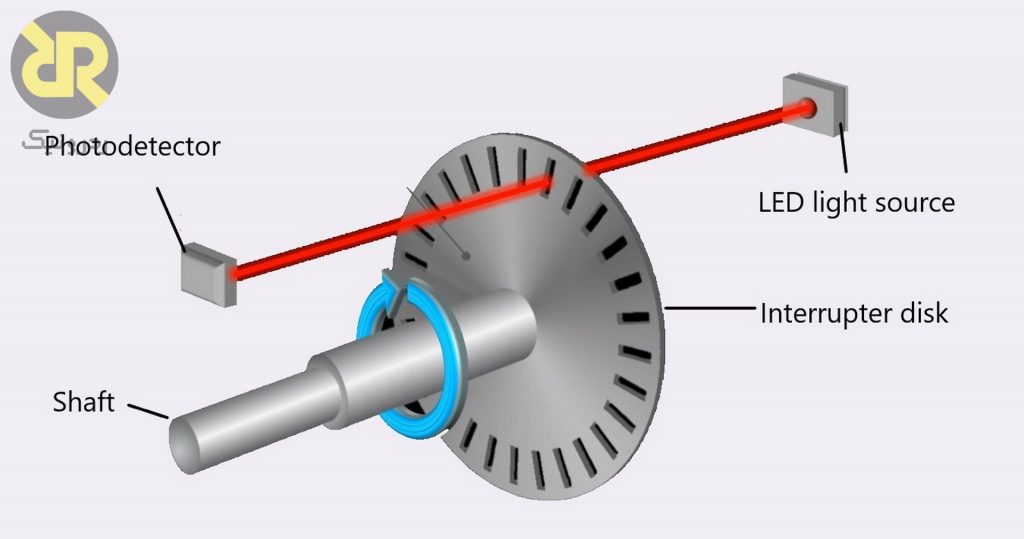
این نوع از انکودرها شامل دیسکی از جنس فلز یا طلق شیشهای هستند که در راستای شعاع دیسک تعداد زیادی شکاف دارند. در یک سوی دیسک تعدادی گیرندهی فوتودیود و در سوی دیگر منبع نوری که معمولا LED است، وجود دارد. برای کسب اطلاعات بیشتر در مورد فوتودیودها به مقالهی آشنایی با فوتودیود مراجعه کنید. خلاف آنچه در مورد انکودرهای مکانیکی صادق است در این نوع از انکودر دیسک متصل به شفت است و منبع نور و فوتودیود قسمتهای غیر متحرک انکودر هستند.
ساختار نمونهای انکودر نوری افزایشی
علت استفاده از چند فوتودیود در انکودرهای نوری افزایشی (Incremental) دقیقا مواردیست که در مورد انکودرهای مکانیکی ذکر شد. یعنی تشخیص جهت حرکت و افزایش دقت.
در انکودرهای نوری مطلق (Absolute) علاوه بر شکافهای منظم در راستای شعاع، شکافهای دیگری در شعاعهایی کوچکتر نیز وجود دارند.
ساختار نمونهای از انکودر نوری مطلق
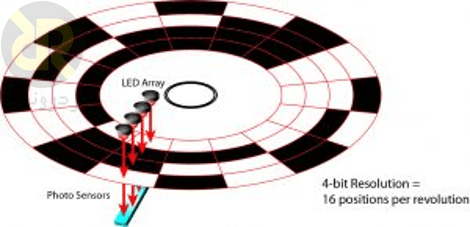
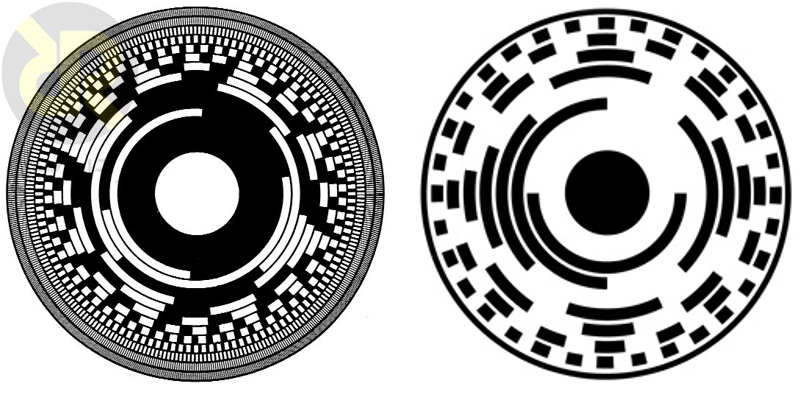
در شکل بالا چهار ردیف شکاف (چهار حلقه) با آرایش متفاوت وجود دارند و برای هر ردیف یک سنسور فوتودیود در نظر گرفته شده است. هر یک از فوتودیودها قادر است وضعیت 0 (عدم عبور نور) و 1 (عبور نور) را تشخیص دهد. با توجه به اینکه چهار فوتودیود وجود دارد، برای اینکه در هر حالت مجموعه فوتودیودها یک خروجی یکتا داشته باشند، هر یک از چهار حلقه باید به 16 قسمت (2 به توان 4) تقسیم شوند که این موضوع در شکل نیز پیداست. با آرایش موجود در شکل 4 به ازای هر 22.5 درجه چرخش (360/16=22.5) یک پالس یکتا از مجموعه فوتوالکتریکها به منظور تشخیص موقعیت زاویهای شفت صادر میشود. اصطلاحا به انکودر دوار نشان داده شده در شکل 4، انکودر 4 بیتی گفته میشود. برای افزایش دقت اندازهگیری موقعیت زاویهای میتوان از تعداد بیشتری حلقه استفاده کرد که به عنوان نمونه دو مدل انکودر با دقت بالاتر در شکل زیر نشان داده شده است.
ساختار دو نمونه از انکودر نوری مطلق با دقت بالا
انکودر مغناطیسی
انکودرهای مغناطیسی از یک دیسک مغناطیسی شده که توسط تعدادی سنسور اثر هال احاطه شده است تشکیل میشوند. لبههای دیسک مغناطیسی دارای قطبهای مغناطیسی است که تعداد آنها رزولوشن انکودر را مشخص میکند. عبور لبههای دیسک از جلوی سنسورهای اثر هال منجر به تولید ولتاژ در این سنسورها میشود که توسط مدار پردازشی به دادهی سرعت زاویهای یا موقعیت زاویهای تبدیل میشود. نحوهی تشخیص سرعت یا موقعیت در این نوع انکودر مشابه با موارد ذکر شده در قبل، با استفاده از تحلیل موج مربعی حاصل از سنسورها است.