
راههای مختلفی برای کنترل سرعت موتورهای DC وجود دارد، اما یک راه بسیار ساده و آسان استفاده از مدولاسیون پهنای پالس یا PWM است.
قبل از اینکه به بررسی ورودی و خروجی مدولاسیون پهنای پالس (Pulse Width Modulation) بپردازیم، باید کمی بیشتر در مورد نحوه عملکرد یک موتور DC بدانیم.
در کنار موتورهای پلهای یا استپ موتورها (stepper)، موتور DC آهنربای دائم (PMDC) متداولترین نوع موتور کوچک جریان مستقیم است که سرعت چرخش پیوستهای را تولید میکند که به راحتی قابل کنترل است. موتورهای DC کوچک برای استفاده در برنامههایی که کنترل سرعت مورد نیاز است مانند اسباب بازیهای کوچک، مدلها، رباتها و سایر مدارهای الکترونیکی از این قبیل، ایدهآل هستند.
یک موتور DC اساساً از دو قسمت تشکیل شده است، بدنه ثابت موتور به نام “استاتور (Stator)” و قسمت داخلی که با چرخش، حرکت را تولید میکند و “روتور (Rotor)” نامیده میشود. برای ماشینهای D.C، روتور معمولا “آرمیچر (Armature)” نامیده میشود.
به طور کلی، در موتورهای DC سبک کوچک، استاتور از یک جفت آهنربای ثابت دائمی تشکیل شده است که یک شار مغناطیسی ثابت و یکنواخت را در داخل موتور ایجاد میکند و به این نوع موتورها نام موتورهای “جریان مستقیم آهنربای دائم” (PMDC) را میدهد.
آرمیچر موتورها شامل سیمپیچهای الکتریکی است که به صورت دایرهای در اطراف بدنه فلزی آن به هم متصل شدهاند و یک قطب شمال و سپس یک قطب جنوب و بعد یک قطب شمال و غیره نوع پیکربندی سیستم میدان را ایجاد میکنند.
جریانی که در این سیم پیچهای روتور جریان دارد، میدان الکترومغناطیسی لازم را تولید میکند. میدان مغناطیسی دایرهای تولید شده توسط سیمپیچهای آرمیچر، هر دو قطب شمال و جنوب را در اطراف آرمیچر ایجاد میکند که توسط آهنرباهای دائمی استاتور دفع یا جذب میشوند و حرکت چرخشی حول محور مرکزی موتور ایجاد میکنند.
موتور آهنربای دائم دوقطبی
با چرخش آرمیچر، جریان الکتریکی از پایانههای موتور به مجموعه بعدی سیمپیچهای آرمیچر از طریق جاروبک های کربنی (carbon brushes) واقع در اطراف کموتاتور (commutator)، منتقل میشود و میدان مغناطیسی دیگری تولید میکند و هر بار که آرمیچر میچرخد، مجموعه جدیدی از سیمپیچهای آرمیچر نیرو میگیرد و آرمیچر را مجبور میکند تا بیشتر و بیشتر بچرخد.
بنابراین، سرعت چرخش یک موتور DC به بر هم کنش بین دو میدان مغناطیسی بستگی دارد، که یکی توسط آهنرباهای ثابت دائمی استاتور و دیگری توسط آهنرباهای الکتریکی چرخان آرمیچر ایجاد میشود و با کنترل این بر هم کنش، میتوانیم سرعت چرخش را کنترل کنیم.
میدان مغناطیسی تولید شده توسط آهنرباهای دائمی استاتور ثابت است و بنابراین نمیتوان آن را تغییر داد، اما اگر قدرت میدان مغناطیسی آرمیچرها را با کنترل جریان عبوری از سیم پیچ ها تغییر دهیم، شار مغناطیسی کم و بیش تولید میشود که در نتیجه بر هم کنش قویتر یا ضعیفتر شده و سرعت بیشتر یا کمتر میشود.
بنابراین، سرعت چرخش یک موتور DC (N)، متناسب است با emf برگشتی (Vb) موتور تقسیم بر شار مغناطیسی (که برای آهنربای دائم ثابت است) و یک ثابت الکترومکانیکی که به ماهیت سیمپیچهای آرمیچر (Ke) بستگی داشته و معادله N ∝ V/KeΦ را نتیجه میدهد.
بنابراین چگونه میتوانیم جریان عبوری از موتور را کنترل کنیم؟ بسیاری از افراد سعی میکنند سرعت یک موتور DC را با استفاده از یک مقاومت متغیر بزرگ (Rheostat) به صورت سری با موتور کنترل کنند.
در حالی که این ممکن است کار کند، همانطور که در مسابقات اتومبیلرانی Scalextric slot انجام میشود، گرما و توان تلف شده زیادی در مقاومت تولید میکند. یک راه ساده و آسان برای کنترل سرعت موتور، تنظیم مقدار ولتاژ در پایانههای آن است و این امر را میتوان با استفاده از “مدولاسیون پهنای پالس” یا PWM به دست آورد.
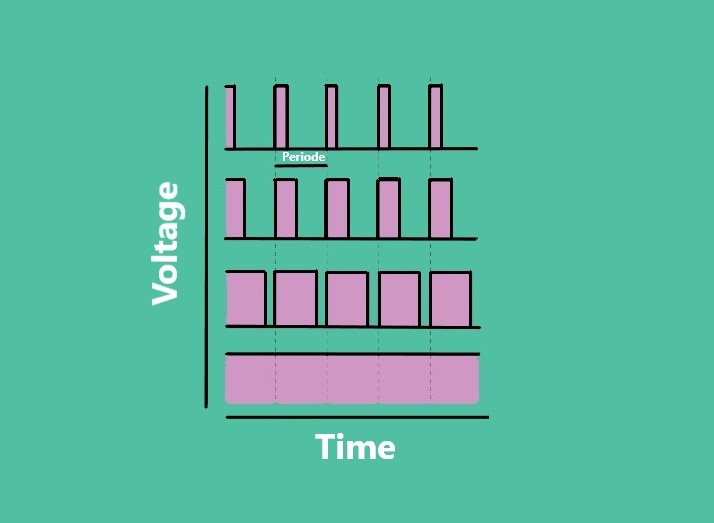
همانطور که از نام آن پیداست، کنترل سرعت مدولاسیون پهنای پالس با به حرکت درآوردن موتور با یک سری پالسهای روشن و خاموش و تغییر چرخه کاری پالسها (کسری از زمان که ولتاژ خروجی روشن است در مقایسه با زمانی که خاموش است) در حالی که فرکانس را ثابت نگه می دارد، کار میکند.
توان اعمال شده به موتور را میتوان با تغییر پهنای این پالس های اعمال شده و در نتیجه تغییر میانگین ولتاژ DC اعمال شده به پایانه های موتور کنترل کرد. با تغییر یا تعدیل زمان این پالسها، میتوان سرعت موتور را کنترل کرد، یعنی هرچه پالس طولانیتر باشد، موتور سریعتر میچرخد و به همین ترتیب، هرچه پالس به مدت کوتاهتری روشن باشد، موتور کندتر خواهد چرخید.
به عبارت دیگر، هرچه پهنای پالس بازتر باشد، متوسط ولتاژ اعمال شده به ترمینالهای موتور بیشتر بوده، شار مغناطیسی داخل سیمپیچهای آرمیچر قویتر است و موتور سریعتر میچرخد که در زیر نشان داده شده است.
شکل موج مدوله شده با پهنای پالس
استفاده از مدولاسیون پهنای پالس برای کنترل یک موتور کوچک این مزیت را دارد که تلفات برق در ترانزیستور سوئیچینگ کم است زیرا ترانزیستور یا کاملاً روشن یا کاملاً خاموش است. در نتیجه، ترانزیستور سوئیچینگ دارای اتلاف توان بسیار کمتری است که به آن یک نوع کنترل خطی میدهد که منجر به پایداری سرعت بهتر میشود.
همچنین دامنه ولتاژ موتور ثابت میماند. بنابراین موتور همیشه در توان کامل است. نتیجه این است که موتور میتواند بسیار آهستهتر بچرخد بدون اینکه متوقف شود. چگونه میتوانیم سیگنال مدولاسیون پهنای پالس را برای کنترل موتور تولید کنیم؟ آسان است، مانند شکل زیر از مدار اسیلاتور ناپایدار 555 استفاده کنید:
این مدار ساده مبتنی بر تراشه تایمر آشنا NE555 یا 7555 برای تولید سیگنال مدولاسیون پهنای پالس مورد نیاز در یک فرکانس خروجی ثابت استفاده میشود. همانطور که در مقاله تایمر 555 به آن پرداختیم، خازن زمانبندی C با جریانی که از شبکههای زمانبندی RA و RB میگذرد، شارژ و تخلیه میشود.
سیگنال خروجی در پین 3 تایمر 555، برابر با ولتاژ تغذیه است که ترانزیستورها را کاملاً روشن میکند. زمان صرف شده برای شارژ یا تخلیه C به مقادیر RA، RB بستگی دارد.
خازن از طریق شبکه RA شارژ میشود اما در اطراف شبکه مقاومتی RB و از طریق دیود D1 منحرف میشود. به محض اینکه خازن شارژ میشود، بلافاصله از طریق دیود D2 و شبکه RB به پین 7، تخلیه میشود. در طول فرآیند تخلیه، خروجی در پین 3 در 0 ولت است و ترانزیستور خاموش میشود.
بنابراین، زمان صرف شده برای خازن C برای گذراندن یک چرخه شارژ-تخلیه کامل به مقادیر RA، RB و C بستگی دارد و زمان T برای یک سیکل کامل به صورت زیر داده میشود:
زمان TH که خروجی “روشن” است: TH = 0.693(RA).C
زمان، TL، که خروجی “خاموش” است: TL = 0.693 (RB).C
کل زمان چرخه روشن – خاموش به صورت: T = TH + TL با فرکانس خروجی ƒ = 1/T داده میشود
با مقادیر مؤلفه نشان داده شده، چرخه کاری شکل موج را میتوان از حدود 8.3٪ (0.5 ولت) تا حدود 91.7٪ (5.5 ولت) با استفاده از منبع تغذیه 6.0 ولتی تنظیم کرد. فرکانس مولتی ویبراتور ناپایدار در حدود 256 هرتز ثابت است و موتور با این سرعت “روشن” و “خاموش” میشود.
مقاومت R1 به علاوه قسمت “بالایی” پتانسیومتر VR1، نشان دهنده شبکه مقاومتی RA است. در حالی که قسمت “پایین” پتانسیومتر به اضافه R2 نشان دهنده شبکه مقاومتی RB در شکل بالا است.
این مقادیر را میتوان برای کاربردها و موتورهای DC مختلف تغییر داد، و به شرط اینکه مدار ناپایدار 555 به اندازه کافی سریع در حداقل چند صد هرتز کار کند، نباید خللی در چرخش موتور وجود داشته باشد.
دیود D3 دیود فلایویل (flywheel diode) مورد علاقه قدیمی است که برای محافظت از مدار الکترونیکی در برابر بارگیری القایی موتور استفاده میشود. همچنین اگر بار موتور زیاد است یک گرماگیر روی ترانزیستور سوئیچینگ یا ماسفت قرار میگیرد.
مدولاسیون پهنای پالس یا PWM یک روش عالی برای کنترل مقدار توان تحویلی به یک بار بدون پخش شدن نیروی تلف شده است. مدار فوق همچنین میتواند برای کنترل سرعت فن یا کاهش روشنایی لامپهای DC یا LED استفاده شود. اگر نیاز به کنترل این موارد دارید، از مدولاسیون پهنای پالس برای انجام آن استفاده کنید.



