سیستمهای حلقه بسته از فیدبک استفاده میکنند که در آن بخشی از سیگنال خروجی به ورودی بازگردانده میشود تا خطاها را کاهش داده و پایداری را بهبود بخشد.
سیستمهایی که در آنها مقدار خروجی هیچ تأثیری بر ورودی فرآیند کنترل ندارد، سیستمهای کنترل حلقه باز نامیده میشوند و سیستمهای حلقه باز دقیقاً همان سیستمهای غیرفیدبکی هستند.
اما هدف هر سیستم کنترل الکتریکی یا الکترونیکی، اندازهگیری، نظارت و کنترل یک فرآیند است و یکی از راههای کنترل دقیق فرآیند، نظارت بر خروجی آن و «برگشت» بخشی از آن برای مقایسه خروجی واقعی با خروجی مورد نظر است تا خطا را کاهش داده و در صورت اختلال، خروجی سیستم را به حالت اولیه یا پاسخ دلخواه برگرداند.
مقدار خروجی اندازهگیری شده “سیگنال فیدبک” نامیده میشود و نوع سیستم کنترلی که از سیگنالهای فیدبک برای کنترل و تنظیم خود استفاده میکند، سیستم حلقه بسته نامیده میشود.
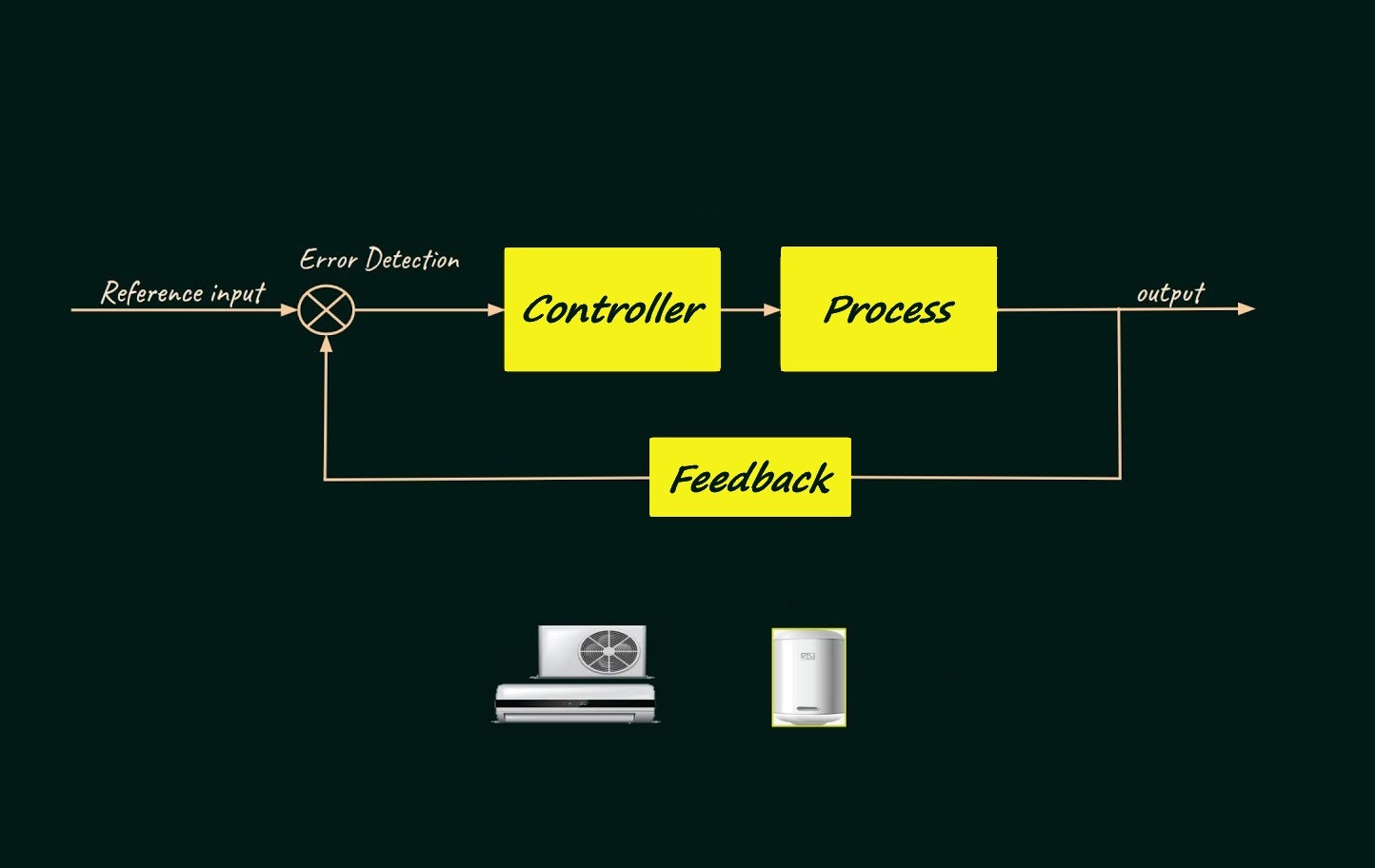
یک سیستم کنترل حلقه بسته که به عنوان سیستم کنترل فیدبک نیز شناخته میشود، سیستمی است که از مفهوم یک سیستم حلقه باز به عنوان مسیر رو به جلو استفاده میکند، اما دارای یک یا چند حلقه فیدبک (که نامش است) یا مسیرهایی بین خروجی و ورودی آن است. ارجاع به “فیدبک” به سادگی به این معنی است که بخشی از خروجی به ورودی “بازگردانده” میشود تا بخشی از تحریک سیستم را تشکیل دهد.
سیستمهای حلقه بسته بگونهای طراحی شدهاند که به طور خودکار شرایط خروجی مطلوب را با مقایسه آن با شرایط واقعی حفظ کنند. این کار را با تولید یک سیگنال خطا انجام میدهند که تفاوت بین خروجی و ورودی مرجع است. به عبارت دیگر، “سیستم حلقه بسته” یک سیستم کنترل کاملا اتوماتیک است که در آن عملکرد کنترل آن به نحوی به خروجی وابسته است.
به عنوان مثال، لباس خشککن برقی را از آموزش حلقه باز قبلی در نظر بگیرید. فرض کنید از یک سنسور یا مبدل (دستگاه ورودی) برای نظارت مداوم بر دما یا خشکی لباس استفاده میکنیم و سیگنال مربوط به خشکی را مطابق شکل زیر به کنترلکننده برمیگردانیم.
کنترل حلقه بسته
1. کنترل حلقه بسته
این سنسور، خشکی واقعی لباس را کنترل کرده و آن را با ورودی مرجع مقایسه میکند (یا از آن کم میکند). سیگنال خطا (خطا = خشکی مورد نیاز – خشکی واقعی) توسط کنترلکننده تقویت میشود و خروجی کنترلکننده اصلاحات لازم را در سیستم گرمایشی انجام میدهد تا هر گونه خطا را کاهش دهد. به عنوان مثال، اگر لباسها خیلی خیس هستند، کنترلکننده ممکن است دما یا زمان خشک شدن را افزایش دهد. به همین ترتیب، اگر لباس تقریباً خشک باشد، ممکن است دما را کاهش دهد یا فرآیند را متوقف کند تا بیش از حد گرم نشود یا لباس نسوزد.
بنابراین، پیکربندی حلقه بسته با سیگنال فیدبکی که از سنسور در سیستم خشک کردن لباس به دست میآید، مشخص میشود. بزرگی و علامت سیگنال خطای حاصل، مستقیماً با تفاوت بین خشکی مورد نیاز و خشکی واقعی لباس مرتبط است.
همچنین، از آنجایی که یک سیستم حلقه بسته اطلاعاتی در مورد شرایط خروجی دارد (از طریق سنسور)، برای کنترل هر گونه اختلال یا تغییر در شرایط سیستم که ممکن است توانایی آن را برای تکمیل کار مورد نظر کاهش دهد، مجهزتر است.
به عنوان مثال مانند قبل، درب خشککن باز میشود و گرما از بین میرود. این بار انحراف در دما توسط سنسور فیدبک تشخیص داده شده و کنترلکننده، خطا را تصحیح میکند تا دمای ثابت را در محدوده مقدار از پیش تعیین شده حفظ کند. یا احتمالاً فرآیند را متوقف کرده و زنگ هشدار را برای اطلاع اپراتور فعال میکند.
همانطور که میبینیم، در یک سیستم کنترل حلقه بسته، سیگنال خطا که تفاوت بین سیگنال ورودی و سیگنال فیدبک (که ممکن است خود سیگنال خروجی یا تابعی از سیگنال خروجی باشد)، به کنترلکننده داده میشود تا خطای سیستم کاهش یابد و خروجی سیستم به مقدار دلخواه برگردد. در این مثال خشکی لباس مورد نظر است. واضح است که وقتی خطا صفر است لباسها خشک میشوند.
اصطلاح کنترل حلقه بسته همیشه به استفاده از یک عمل کنترل فیدبک به منظور کاهش هر گونه خطا در سیستم و “فیدبک” آن اشاره دارد که تفاوتهای اصلی بین یک سیستم حلقه باز و یک سیستم حلقه بسته را متمایز میکند. بنابراین، دقت خروجی به مسیر فیدبک بستگی دارد که به طور کلی میتوان آن را بسیار دقیق ساخت. در سیستمها و مدارهای کنترل الکترونیکی، کنترل فیدبکی بیش از کنترل حلقه باز یا پیشخور استفاده میشود.
سیستمهای حلقه بسته مزایای زیادی نسبت به سیستمهای حلقه باز دارند. مزیت اصلی یک سیستم کنترل فیدبک حلقه بسته توانایی آن در کاهش حساسیت سیستم به اغتشاشات خارجی است، به عنوان مثال باز کردن درب خشککن، در نتیجه سیستم دارای کنترل قدرتمندتری بوده زیرا هر گونه تغییر در سیگنال فیدبک توسط کنترلکننده جبران میشود.
بنابراین می توانیم ویژگیهای اصلی کنترل حلقه بسته را به صورت زیر تعریف کنیم:
کاهش خطا با تنظیم خودکار ورودی سیستم.
بهبود پایداری یک سیستم ناپایدار.
افزایش یا کاهش حساسیت سیستم.
افزایش استحکام در برابر اختلالات خارجی فرآیند.
تولید عملکرد قابل اعتماد و تکرارپذیر.
در حالی که یک سیستم حلقه بسته میتواند مزایای زیادی نسبت به یک سیستم کنترل حلقه باز داشته باشد، عیب اصلی آن این است که برای ارائه کنترل لازم، یک سیستم حلقه بسته با داشتن یک یا چند مسیر فیدبک پیچیدهتر است. همچنین، اگر بهره کنترلکننده نسبت به تغییرات در فرمانها یا سیگنالهای ورودی آن بسیار حساس باشد، میتواند ناپایدار شده و با تلاش کنترلکننده برای تصحیح بیش از حد خود شروع به نوسان کند و در نهایت چیزی خراب شود. بنابراین، باید به سیستم گفته شود که چگونه در محدودههای از پیش تعریف شده رفتار کند.
نقاط جمع حلقه بسته
برای اینکه یک سیستم فیدبک حلقه بسته بتواند هر سیگنال کنترلی را تنظیم کند، ابتدا باید خطای بین خروجی واقعی و خروجی مورد نظر را تعیین کند. این هدف با استفاده از یک نقطه جمع، که به عنوان عنصر مقایسه نیز نامیده میشود، بین حلقه فیدبک و ورودی سیستم به دست میآید. این نقاط جمع، نقطه تنظیم سیستم را با مقدار واقعی مقایسه کرده و یک سیگنال خطای مثبت یا منفی تولید میکنند که کنترلکننده نیز به آن پاسخ میدهد. مقدار این خطا به این صورت تعریف میشود: خطا = نقطه تنظیم – واقعی.
نمادی که برای نشان دادن یک نقطه جمع در بلوک دیاگرام سیستمهای حلقه بسته استفاده میشود، نماد یک دایره با دو خط متقاطع است. نقطه جمع میتواند سیگنالهایی را با هم اضافه کند که در آن از نماد بهعلاوه (+) استفاده میشود که دستگاه را «جمعکننده» نشان میدهد (برای فیدبک مثبت استفاده میشود)، یا میتواند سیگنالها را از یکدیگر کم کند که در این صورت یک منها (-) استفاده میشود که نشان میدهد دستگاه “مقایسهکننده” است (برای فیدبک منفی استفاده میشود)، همانطور که نشان داده شده است.
2. نقاط جمع حلقه بسته
انواع نقطه جمع
توجه داشته باشید که نقاط جمع میتوانند بیش از یک سیگنال به عنوان ورودی داشته باشند، چه با جمع یا تفریق، اما میتوانند فقط یک خروجی که مجموع جبری ورودیها است، داشته باشند. همچنین فلشها جهت سیگنالها را نشان میدهند. نقاط جمع را میتوان با هم سری کرد تا امکان جمع شدن متغیرهای ورودی بیشتری در یک نقطه مشخص فراهم شود.
تابع انتقال سیستم حلقه بسته
تابع انتقال هر سیستم کنترل الکتریکی یا الکترونیکی رابطه ریاضی بین ورودی سیستم و خروجی آن است و از این رو رفتار سیستم را توصیف میکند. همچنین توجه داشته باشید که نسبت خروجی یک دستگاه خاص به ورودی آن نشان دهنده بهره آن است. بنابراین، به درستی میتوان گفت که خروجی همیشه برابر تابع انتقال سیستم ضربدر ورودی است. سیستم حلقه بسته زیر را در نظر بگیرید.
نمایش سیستم حلقه بسته معمولی
2. نمایش سیستم حلقه بسته معمولی
در این شکل: بلوک G نشاندهنده بهرههای حلقه باز کنترلکننده یا سیستم در مسیر رو به جلو است و بلوک H نشاندهنده بهره سنسور، مبدل یا سیستم اندازهگیری در مسیر فیدبک است.
برای یافتن تابع انتقال سیستم حلقه بسته بالا، ابتدا باید سیگنال خروجی θo را بر حسب سیگنال ورودی θi محاسبه کنیم. برای این کار به راحتی میتوانیم معادلات بلوک دیاگرام داده شده را به صورت زیر بنویسیم.
خروجی از سیستم برابر است با: خروجی = G × خطا
توجه داشته باشید که سیگنال خطا θe، ورودی بلوک رو به جلو G نیز است.
خروجی از نقطه جمع برابر است با: خطا = ورودی – H × خروجی
اگر H = 1 (فیدبک واحد) پس:
خروجی از نقطه جمع خواهد بود: خطا (θe) = ورودی – خروجی
با جایگذاری خطا داریم:
خروجی برابر است با: خروجی = G × (ورودی – H × خروجی)
بنابراین: G × ورودی = خروجی + G × H × خروجی
با مرتب کردن موارد فوق، تابع انتقال حلقه بسته بدست میآید:
معادله بالا برای تابع انتقال یک سیستم حلقه بسته یک علامت بعلاوه (+) را در مخرج دارد که نشاندهنده فیدبک منفی است. در یک سیستم فیدبک مثبت، مخرج علامت منفی (-) خواهد داشت و معادله برابر 1 – GH میشود.
میتوان دید که وقتی H = 1 (فیدبک واحد) و G بسیار بزرگ است، تابع انتقال به شکل زیر به یک نزدیک میشود:
همچنین با کاهش بهره حالت پایدار سیستم G، مقدار G/(1 + G) بسیار کندتر کاهش مییابد. به عبارت دیگر، سیستم نسبتاً به تغییرات در بهره سیستم که با G نشان داده شده است، غیرحساس است و این یکی از مزایای اصلی یک سیستم حلقه بسته است.
سیستم حلقه بسته چند حلقه
در حالی که مثال بالا مربوط به یک سیستم حلقه بسته تک ورودی و خروجی است، تابع انتقال همچنان برای سیستمهای چند حلقهای پیچیدهتر نیز کاربرد دارد. بیشتر مدارهای فیدبک عملی، نوعی کنترل حلقههای چندگانه دارند. برای پیکربندی چند حلقه، تابع انتقال بین متغیر کنترلشده و متغیر دستکاریشده به باز یا بسته بودن سایر حلقههای کنترل فیدبک بستگی دارد.
سیستم چند حلقهای زیر را در نظر بگیرید.
3. سیستم حلقه بسته چند حلقه
هر بلوک سری مانند G1 و G2 و همچنین تابع انتقال حلقه داخلی را میتوان ترکیب کرد، همانطور که نشان داده شده است.
4. سیستم حلقه بسته چند حلقه
پس از کاهش بلوکها، به یک بلوک دیاگرام نهایی میرسیم که شبیه به سیستم حلقه بسته قبلی، تک حلقه است.
5. سیستم حلقه بسته چند حلقه
و تابع انتقال این سیستم چند حلقهای برابر است با:
بنابراین میتوان دید که حتی نمودارهای بلوکی چند حلقهای پیچیده را میتوان کاهش داد تا یک بلوک دیاگرام منفرد با یک تابع انتقال سیستم مشترک ارائه شود.
کنترل موتور حلقه بسته
چگونه میتوانیم از سیستمهای حلقه بسته در الکترونیک استفاده کنیم؟ کنترلکننده موتور DC را از آموزش حلقه باز قبلی در نظر بگیرید. اگر یک مبدل اندازهگیری سرعت، مانند سرعت سنج را به محور (shaft) موتور DC متصل کنیم، میتوانیم سرعت آن را تشخیص داده و سیگنالی متناسب با سرعت موتور به تقویتکننده ارسال کنیم. سرعتسنج که به نام تاکو ژنراتور (tacho-generator) نیز شناخته میشود، به سادگی یک ژنراتور DC با آهنربای دائمی است که ولتاژ خروجی DC متناسب با سرعت موتور میدهد.
بنابراین موقعیت لغزنده پتانسیومتر، ورودی θiرا نشان میدهد که توسط تقویتکننده (کنترلکننده) تقویت میشود تا موتور DC را با سرعت تنظیم شده N به حرکت درآورد که نشاندهنده خروجی θo سیستم است، و سرعت سنج T حلقه بسته بازگشت به کنترلکننده خواهد بود. تفاوت بین ولتاژ ورودی و سطح ولتاژ فیدبک، سیگنال خطا را، همانطور که نشان داده شده است، میدهد.
کنترل موتور حلقه بسته
هر گونه اختلال خارجی در سیستم کنترل موتور حلقه بسته مانند افزایش بار موتورها باعث ایجاد تفاوت در سرعت واقعی موتور و نقطه تنظیم ورودی پتانسیومتر شود.
این تفاوت یک سیگنال خطا ایجاد میکند که کنترلکننده به طور خودکار با تنظیم سرعت موتورها به آن پاسخ میدهد. بنابراین، کنترلکننده برای به حداقل رساندن سیگنال خطا کار میکند، و خطای صفر سرعت واقعی را نشان میدهد که برابر با نقطه تنظیم است.
به صورت الکترونیکی، میتوانیم مدار کنترل موتور فیدبک تاکومتر حلقه بسته ساده را با استفاده از یک تقویتکننده عملیاتی (op-amp) برای کنترلکننده، همانطور که نشان داده شده است، پیادهسازی کنیم.
6. کنترل موتور حلقه بسته
مدار کنترلکننده موتور حلقه بسته
7. مدار کنترلکننده موتور حلقه بسته
این کنترلکننده ساده موتور حلقه بسته را میتوان به صورت بلوک دیاگرام نشان داد.
بلوک دیاگرام برای کنترلکننده فیدبک
8. بلوک دیاگرام برای کنترلکننده فیدبک
کنترلکننده موتور حلقه بسته یک وسیله رایج برای حفظ سرعت موتور مورد نظر در شرایط بار متفاوت با تغییر میانگین ولتاژ اعمال شده به ورودی کنترلر است. سرعتسنج را میتوان با یک رمزگذار نوری (optical encoder) یا سنسور موقعیتی یا چرخشی نوع اثر هال (Hall-effect) جایگزین کرد.
خلاصه سیستمهای حلقه بسته
دیدیم که یک سیستم کنترل الکترونیکی با یک یا چند مسیر فیدبک، سیستم حلقه بسته نامیده میشود. سیستمهای کنترل حلقه بسته که «سیستمهای کنترل فیدبک» نیز نامیده میشوند، در کنترل فرآیند و سیستمهای کنترل الکترونیکی بسیار رایج هستند. سیستمهای فیدبک بخشی از سیگنال خروجی خود را برای مقایسه با وضعیت نقطه تنظیم مورد نظر به ورودی “فیدبک” میدهند. نوع سیگنال فیدبک میتواند منجر به فیدبک مثبت یا منفی شود.
در یک سیستم حلقه بسته، از یک کنترلکننده برای مقایسه خروجی یک سیستم با شرایط مورد نیاز استفاده میشود و خطا را به یک عمل کنترلی طراحی شده برای کاهش آن و برگرداندن خروجی سیستم به پاسخ مورد نظر، تبدیل میکند. بنابراین، سیستمهای کنترل حلقه بسته از فیدبک برای تعیین ورودی واقعی به سیستم استفاده میکنند و میتوانند بیش از یک حلقه فیدبک داشته باشند.
سیستمهای کنترل حلقه بسته مزایای زیادی نسبت به سیستمهای حلقه باز دارند. یک مزیت این است که استفاده از فیدبک باعث میشود پاسخ سیستم نسبت به اختلالات خارجی و تغییرات داخلی در پارامترهای سیستم مانند دما نسبتاً غیرحساس باشد. بنابراین میتوان از اجزای نسبتاً غیردقیق و ارزان قیمت برای به دست آوردن کنترل دقیق یک فرآیند یا برنامه استفاده کرد.
با این حال، پایداری سیستم میتواند یک مشکل بزرگ به ویژه در سیستمهای حلقه بسته با طراحی بد باشد، زیرا ممکن است بیش از اندازه سعی در کنترل هر گونه خطایی کرده که میتواند باعث از دست دادن کنترل و نوسان سیستم شود.
در مقاله بعدی در مورد سیستمهای الکترونیکی، به روشهای مختلفی که میتوانیم نقطه جمع را در ورودی یک سیستم وارد کنیم و روشهای مختلفی که میتوانیم سیگنالها را به آن فیدبک دهیم، خواهیم پرداخت.