
پیکربندی حلقه باز، وضعیت سیگنال خروجی خود را نظارت یا اندازه گیری نمیکند زیرا فیدبکی وجود ندارد.
در مقاله قبلی در مورد سیستمهای الکترونیکی دیدیم که یک سیستم را میتوان مجموعهای از زیرسیستمها تعریف کرد که سیگنال ورودی را جهت ایجاد خروجی مورد نظر هدایت یا کنترل میکنند.
عملکرد هر سیستم الکترونیکی، تنظیم خودکار و ثابت نگه داشتن خروجی از طریق مقدار ورودی یا “نقطه تنظیم” مورد نظر سیستم است. اگر ورودی سیستم به هر دلیلی تغییر کند، خروجی سیستم باید مطابق با آن پاسخ دهد و خود را تغییر دهد تا مقدار ورودی جدید را منعکس کند.
به همین ترتیب، اگر اتفاقی بیفتد که خروجی سیستم را بدون تغییر در مقدار ورودی مختل کند، خروجی باید با بازگشت به مقدار تنظیم شده قبلی خود پاسخ دهد. در گذشته، سیستمهای کنترل الکتریکی اساساً دستی یا سیستم حلقه باز بودند و ویژگیهای کنترل خودکار یا فیدبک بسیار کمی برای تنظیم فرآیند به منظور حفظ سطح یا مقدار خروجی مورد نظر، تعبیه شده بود.
به عنوان مثال، یک خشککن برقی را میتوان نام برد. بسته به مقدار لباس یا میزان مرطوب بودن آنها، یک کاربر یا اپراتور یک تایمر (کنترلکننده) را برای 30 دقیقه تنظیم میکند و در پایان 30 دقیقه، خشککن به طور خودکار متوقف و خاموش میشود حتی اگر لباس هنوز مرطوب باشد.
در این حالت، عمل کنترلی این است که اپراتور به صورت دستی رطوبت لباس را ارزیابی کرده و فرآیند (خشککن) را بر اساس آن تنظیم کند.
در این مثال، خشککن لباس یک سیستم حلقه باز خواهد بود زیرا وضعیت سیگنال خروجی را که خشکی لباس است، نظارت یا اندازهگیری نمیکند. بنابراین، دقت فرآیند خشک کردن یا موفقیت در خشک کردن لباس به تجربه کاربر (اپراتور) بستگی دارد.
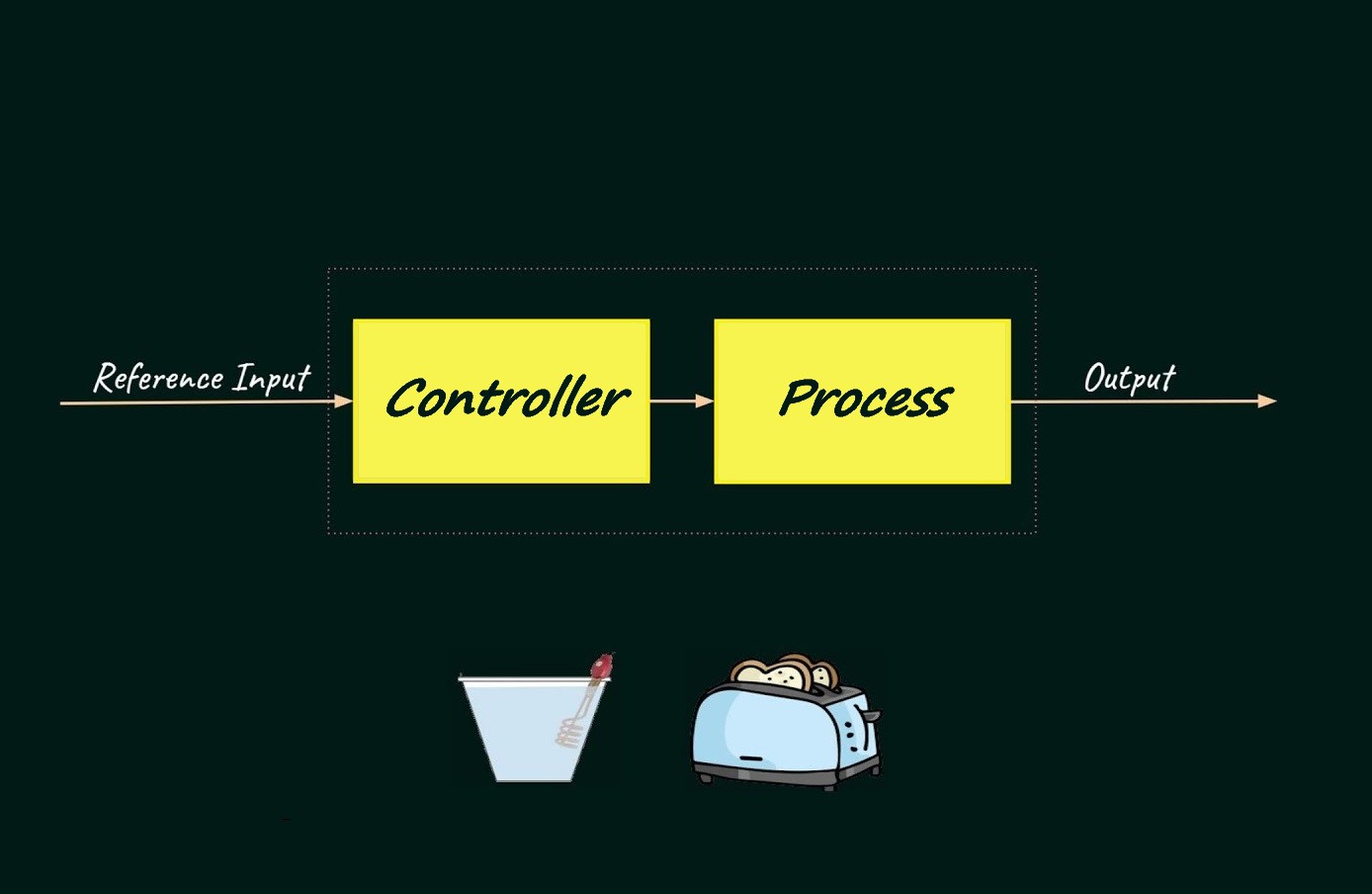
با این حال، کاربر ممکن است در هر زمان که بخواهد فرآیند خشک کردن سیستم را با افزایش یا کاهش زمان خشک کردن کنترلرهای زمانبندی تنظیم کند، اگر فکر میکند که فرآیند خشک کردن اولیه کافی نیست. به عنوان مثال، افزایش کنترلکننده زمان به 40 دقیقه برای افزایش فرآیند خشک کردن. بلوک دیاگرام حلقه باز زیر را در نظر بگیرید.
سیستم خشککن حلقه باز
بنابراین، یک سیستم حلقه باز که به آن سیستم بدون فیدبک نیز میگویند، نوعی سیستم کنترل پیوسته است که در آن خروجی هیچ تأثیری بر عملکرد کنترل سیگنال ورودی ندارد. به عبارت دیگر، در یک سیستم کنترل حلقه باز، خروجی برای مقایسه با ورودی نه اندازهگیری میشود و نه “فیدبک” میخورد. بنابراین، از یک سیستم حلقه باز انتظار میرود که بدون توجه به نتیجه نهایی، دستور ورودی یا نقطه تنظیم خود را دنبال کند.
همچنین، یک سیستم حلقه باز هیچ اطلاعی از شرایط خروجی ندارد، بنابراین نمیتواند خطاهایی را که ممکن است در هنگام تغییر مقدار از پیش تعیین شده ایجاد شده، تصحیح کند، حتی اگر این منجر به انحرافات زیادی از مقدار از پیش تعیین شده شود.
یکی دیگر از معایب سیستمهای حلقه باز این است که دارای تجهیزات کمی در کنترل اختلالات یا تغییرات شرایط هستند که ممکن است توانایی آنها را برای تکمیل کار مورد نظر کاهش دهد. به عنوان مثال، درب خشککن باز میشود و گرما از بین میرود. کنترلکننده زمان، بدون توجه 30 دقیقه به کار ادامه میدهد، اما لباسها در پایان فرآیند خشک کردن، خشک نمیشوند. دلیل آن این است که هیچ اطلاعاتی برای حفظ دمای ثابت وجود ندارد.
بنابراین، میتوانیم ببینیم که خطاهای سیستم حلقه باز میتواند فرآیند خشک کردن را مختل کند و نیاز به توجه نظارتی اضافی یک کاربر (اپراتور) دارد. مشکل این روش کنترل مقدماتی این است که کاربر باید مرتباً به دمای فرآیند نگاه کند و هر زمان که فرآیند خشک کردن از مقدار مورد نظر خود یعنی خشک کردن لباس منحرف شد، هرگونه اقدام کنترلی اصلاحی را انجام دهد. این نوع کنترل حلقه باز دستی که قبل از وقوع خطا واکنش نشان میدهد، کنترل پیش خور (Feed forward) نامیده میشود.
هدف از کنترل پیشخور، که به عنوان کنترل مقدماتی نیز شناخته میشود، اندازهگیری یا پیشبینی هرگونه اختلال بالقوه حلقه باز و جبران آنها به صورت دستی قبل از انحراف متغیر کنترلشده از نقطه تنظیم اولیه است. بنابراین برای مثال ساده ما در بالا، اگر درب خشککن باز بود، شناسایی و بسته میشد تا فرآیند خشک کردن ادامه یابد.
در صورت عمل به طور درست، انحراف از لباس خیس به لباس خشک در پایان 30 دقیقه حداقل خواهد بود اگر کاربر به وضعیت خطا (باز شدن در) خیلی سریع پاسخ دهد. با این حال، اگر سیستم تغییر کند، این رویکرد پیشخور ممکن است کاملاً دقیق نباشد، برای مثال افت دمای خشککن در طول فرآیند 30 دقیقهای بررسی نشد.
بنابراین، میتوانیم ویژگیهای اصلی یک «سیستم حلقه باز» را به این صورت تعریف کنیم:
- هیچ مقایسهای بین مقادیر واقعی و مطلوب وجود ندارد.
- یک سیستم حلقه باز هیچ اقدام خودتنظیمی یا کنترلی روی مقدار خروجی ندارد.
- هر تنظیم ورودی یک موقعیت عملیاتی ثابت را برای کنترلر تعیین میکند.
- تغییرات یا اختلالات در شرایط خارجی منجر به تغییر مستقیم خروجی نمیشود (مگر اینکه تنظیمات کنترلر به صورت دستی تغییر داده شود).
هر سیستم حلقه باز را میتوان به صورت چند بلوک متصل شده به صورت سری یا یک بلوک دیاگرام منفرد با ورودی و خروجی نشان داد. بلوک دیاگرام یک سیستم حلقه باز نشان میدهد که مسیر سیگنال از ورودی به خروجی یک مسیر خطی بدون حلقه فیدبک است و برای هر نوع سیستم کنترلی ورودی با θi و خروجی با θo نمایش داده میشود.
به طور کلی، مجبور نیستیم بلوک دیاگرام حلقه باز را برای محاسبه تابع انتقال حقیقی آن دستکاری کنیم. فقط باید روابط یا معادلات مناسب را برای هر بلوک دیاگرام نوشته و سپس تابع انتقال نهایی را از این معادلات همانطور که نشان داده شده است، محاسبه کنیم.
سیستم حلقه باز

بنابراین، تابع انتقال هر بلوک به صورت زیر است:

تابع انتقال کلی به صورت زیر ارائه میشود:

بنابراین، بهره حلقه باز به سادگی به صورت زیر است:
در این معادله، G تابع انتقال سیستم یا زیرسیستم را نشان داده و میتوان آن را به صورت زیر بازنویسی کرد: G(s) = θo(s)/θi(s)
سیستمهای کنترل حلقه باز اغلب برای فرآیندهایی استفاده میشوند که به دنبالهای از وقایع با کمک سیگنالهای «روشن-خاموش» نیاز دارند. به عنوان مثال، ماشین لباسشویی که نیاز به “روشن” شدن آب دارد و پس از پر شدن، “خاموش” میشود و سپس المنت گرمکننده “روشن” میشود تا آب گرم شود و پس از آن در دمای مناسب، “خاموش” میشود.
این نوع کنترل حلقه باز «روشن-خاموش» برای سیستمهایی مناسب است که تغییرات بار به کندی اتفاق میافتد و فرآیند بسیار کند عمل کرده و نیاز به تغییرات کم در عمل کنترل توسط اپراتور دارد.
خلاصه سیستم های کنترلی حلقه باز
دیدیم که یک کنترلکننده میتواند ورودیهای خود را برای بدست آوردن اثر مطلوب بر روی خروجی یک سیستم، دستکاری کند. یکی از انواع سیستمهای کنترلی که در آن خروجی هیچ تأثیری بر عملکرد کنترل سیگنال ورودی ندارد، سیستم حلقه باز نامیده میشود.
“سیستم حلقه باز” با این واقعیت تعریف میشود که سیگنال یا شرایط خروجی برای مقایسه با سیگنال ورودی یا نقطه تنظیم سیستم نه اندازهگیری میشود و نه “فیدبک” میخورد. بنابراین، سیستمهای حلقه باز معمولاً به عنوان “سیستم های بدون فیدبک” شناخته میشوند.
همچنین، از آنجایی که یک سیستم حلقه باز از فیدبک برای تعیین اینکه آیا خروجی مورد نیاز خود بدست آمده است، استفاده نمیکند، «فرض میکند» که هدف مورد نظر ورودی، موفقیتآمیز بوده است، زیرا خطاهایی که مرتکب شده را نمیتواند تصحیح کند و بنابراین نمیتواند هیچیک از اختلالات خارجی در سیستم را جبران کند.
کنترل موتور حلقه باز
برای مثال، کنترلکننده موتور DC را مطابق شکل فرض کنید. سرعت چرخش موتور به ولتاژی که توسط پتانسیومتر به تقویتکننده (کنترلکننده) میرسد، بستگی دارد. مقدار ولتاژ ورودی میتواند متناسب با موقعیت پتانسیومتر باشد.
اگر پتانسیومتر به بیشترین مقاومت تنظیم شود، حداکثر ولتاژ مثبت به تقویتکننده میرسد که نشان دهنده سرعت کامل است. به همین ترتیب، اگر درجه پتانسیومتر به کمترین مقاومت تنظیم شود، ولتاژ صفر تامین میشود که نشان دهنده سرعت بسیار کند یا توقف است.
موقعیت درجه پتانسیومتر، ورودی θi را نشان میدهد که توسط تقویتکننده (کنترلکننده) تقویت میشود تا موتور DC (فرآیند) را با سرعت تنظیم شده N نشاندهنده خروجی θo سیستم، تحریک کند. موتور با سرعت ثابتی که با موقعیت پتانسیومتر تعیین میشود به چرخش خود ادامه میدهد.
از آنجایی که مسیر سیگنال از ورودی به خروجی یک مسیر مستقیم است که بخشی از هیچ حلقهای را تشکیل نمیدهد، بهره کلی سیستم برابر سری کردن مقادیر بهرههای جداگانه پتانسیومتر، تقویتکننده، موتور و بار خوهد بود. به وضوح مطلوب است که سرعت خروجی موتور با موقعیت پتانسیومتر یکسان بوده و بهره کلی سیستم را واحد نشان دهد.
با این حال، بهرههای جداگانه پتانسیومتر، تقویتکننده و موتور ممکن است در طول زمان با تغییر ولتاژ یا دما تغییر کند، یا بار موتور ممکن است افزایش یابد که نشاندهنده اختلالات خارجی در سیستم کنترل موتور حلقه باز است.
اما کاربر در نهایت از تغییر در عملکرد سیستم (تغییر سرعت موتور) آگاه خواهد شد و ممکن است آن را با افزایش یا کاهش سیگنال ورودی پتانسیومتر برای حفظ سرعت اولیه یا دلخواه اصلاح کند.
مزایای این نوع “کنترل موتور حلقه باز” این است که به طور بالقوه ارزان و دارای پیادهسازی ساده است که آن را برای استفاده در سیستمهای کاملاً تعریفشده (well-defined)، ایدهآل میکند. در این سیستم رابطه بین ورودی و خروجی مستقیم بوده و تحت تأثیر هیچگونه اختلال بیرونی قرار نمیگیرد. متأسفانه این نوع سیستم حلقه باز به اندازه کافی مناسب نیست زیرا تغییرات یا اختلالات در سیستم بر سرعت موتور تأثیر میگذارد. بنابراین، شکل دیگری از کنترل مورد نیاز است.
در مقاله بعدی سیستمهای الکترونیکی، به تأثیر فیدبکِ مقداری از سیگنال خروجی به ورودی میپردازیم تا کنترل سیستمها بر اساس تفاوت بین مقادیر واقعی و مطلوب باشد. به این نوع سیستم کنترل الکترونیکی، کنترل حلقه بسته میگویند.



