/* USER CODE END Header_Task_A_Func */
void Task_A_Func(void const * argument)
{
/* USER CODE BEGIN 5 */
/* Infinite loop */
uint8_t id = 0;
uint8_t rxdata[5] = {0};
uint8_t Txdata[5] = {0};
uint16_t ADC_dout;
volatile uint8_t i = 0;
for (i =0;i<255;i++)
{
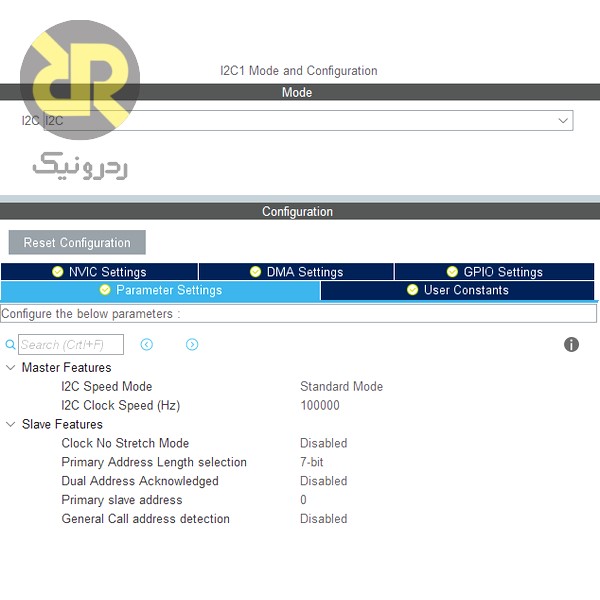
HAL_StatusTypeDef eRes = HAL_I2C_IsDeviceReady(&hi2c1, i, 1,100);
if (eRes == HAL_OK)
{
id = i;
break;
}
}
for(;;)
{
Txdata[0] = 0xF6;
HAL_StatusTypeDef eRes = HAL_I2C_Master_Transmit(&hi2c1, id, Txdata, 1, 100);
eRes = HAL_I2C_Master_Receive(&hi2c1, id, rxdata, 2, 100);
ADC_dout = ((uint16_t)rxdata[0] << 8U) + ((uint16_t)rxdata[1]);
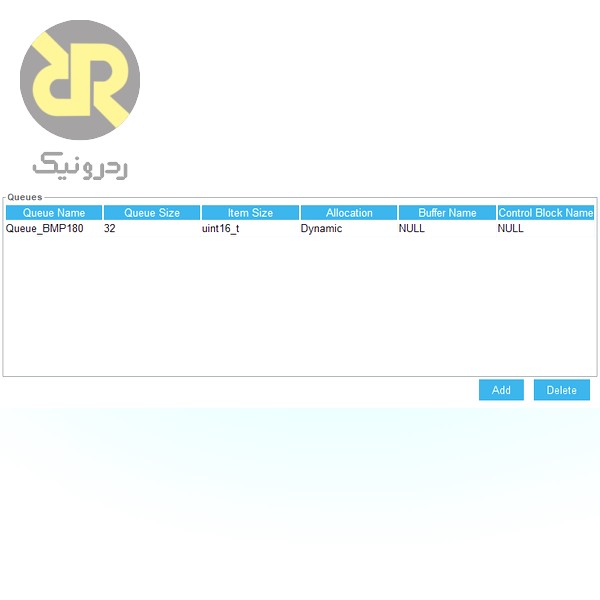
xQueueSendToBack( Queue_BMP180Handle, &ADC_dout, osWaitForever );
osDelay(100);
}
/* USER CODE END 5 */
}
/* USER CODE END Header_Task_B_Func */
void Task_B_Func(void const * argument)
{
/* USER CODE BEGIN Task_B_Func */
uint8_t strDataToPC[20] = {0};
uint16_t ADC_dout;
/* Infinite loop */
for(;;)
{
xQueueReceive(Queue_BMP180Handle, &ADC_dout, osWaitForever);
sprintf(strDataToPC, "BMP Data = %4d\n", ADC_dout);
HAL_UART_Transmit(&huart3, strDataToPC, strlen(strDataToPC), 100);
}
/* USER CODE END Task_B_Func */
}
سلام و خسته نباشید و ممنون از مطالب عالیتان
سلام
در انتهای توضیحات نمونه کدی دیده نمیشود
سلام
در انتهای برنامه ،نمونه برنامه ای نیست
با سلام و احترام،
کد مربوطه قرار داده شد.
سپاس از کامنت شما.
با سلام و احترام
کد انتهای مقاله قرار داده شد.