void udp_echoserver_receive_callback(void *arg, struct udp_pcb *upcb, struct pbuf *p, const ip_addr_t *addr, u16_t port)
{
struct pbuf *p_tx;
/* allocate pbuf from RAM*/
p_tx = pbuf_alloc(PBUF_TRANSPORT,p->len, PBUF_RAM);
if(p_tx != NULL)
{
pbuf_take(p_tx, (char*)p->payload, p->len);
/* Connect to the remote client */
udp_connect(upcb, addr, UDP_CLIENT_PORT);
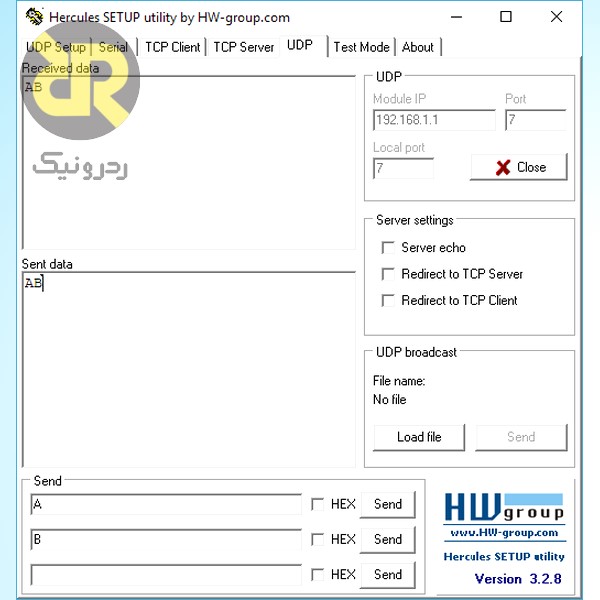
if (*(uint8_t*)(p_tx->payload) == 'A')
{
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_6, GPIO_PIN_SET);
}
else if (*(uint8_t*)(p_tx->payload) == 'B')
{
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_6, GPIO_PIN_RESET);
}
/* Tell the client that we have accepted it */
udp_send(upcb, p_tx);
/* free the UDP connection, so we can accept new clients */
udp_disconnect(upcb);
/* Free the p_tx buffer */
pbuf_free(p_tx);
/* Free the p buffer */
pbuf_free(p);
}
}
main koosh ? 😐
سلام با تشکر از آموزش خوبتون لطفأ اگه امکان داره تابع tcp_echoserver_accept را هم قرار دهید با تشکر
خدانگهدار