
موتورهای DC المانهای الکترومغناطیسی هستند که بر اثر تعاملات میدانهای مغناطیسی با یکدیگر کار میکند تا انرژی الکتریکی را به انرژی مکانیکی گردشی تبدیل کنند

موتورهای الکتریکی دی سی، عملگرهای پیوستهای هستند که انرژی الکتریکی را به انرژی مکانیکی تبدیل میکنند از موتورهای DC میتوان برای فنها، کمپرسورها، چرخها و … استفاده کرد.
علاوه بر موتورهای DC دوار مرسوم، موتورهای خطی نیز در دسترس میباشند که میتوانند حرکت خطی پیوسته داشته باشند. ۳ نوع موتور الکتریکی در دسترس میباشد : موتورهای AC، موتورهای DC و استپر موتور.
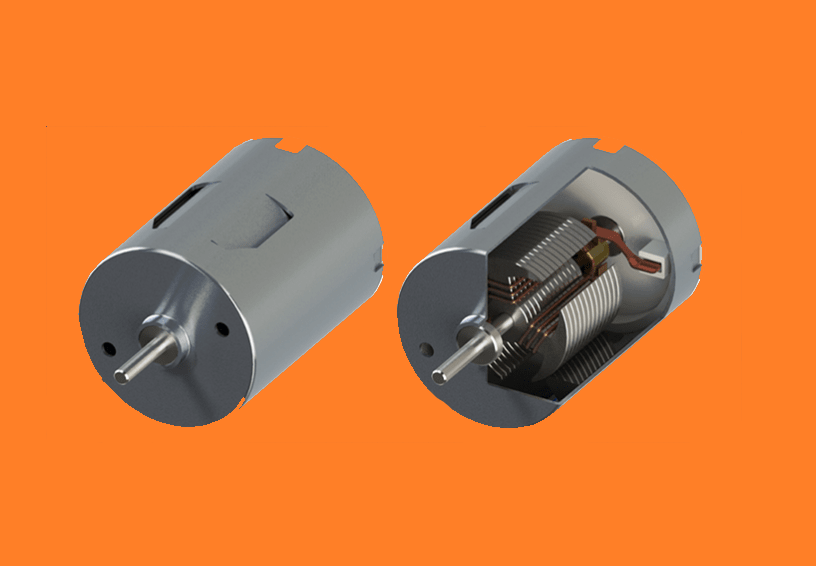
یک موتور DC کوچک
موتورهای AC تکفاز و چندفاز معمولاً برای مصارف توان بالای صنعتی استفاده میشوند که نیاز به گشتاور و سرعت ثابت برای کنترل بارهای بزرگ مانند فنها و پمپها احساس میشود.
در این مقاله ما تنها به موتورهای ساده توان پایین DC و استپ موتورها میپردازیم که در خیلی از مدارات الکترونیکی مانند مدارهای کنترل موقعیت، میکروپروسسورها، PIC ها و مدارهای ربات به کار میروند .
موتور جریان مستقیم یا موتور DC رایجترین اکچویتور یا عملگر موجود در بازار برای ایجاد حرکت پیوسته میباشد که سرعت گردشش به راحتی میتواند کنترل شود. این قابلیت موتورهای DC را برای خیلی از مدارها که کنترل سرعت در آن مهم است، مناسب میکند یک موتور DC از دو قسمت تشکیل شده :
(۱) استاتور (Stator) : که بخش ثابت موتور را تشکیل میدهد.
(۲) روتور (Rotor): که بخش دوار موتور است.
انواع موتور دی سی
۳ نوع موتور DC در دسترس میباشد :
1. موتور براش یا جاروبک دار:
این نوع از موتور یک میدان مغناطیسی را به وسیله ی یک جریان از یک براش کربنی در روتور به وجود می آورد و به همین دلیل به آن موتور براش میگویند.
میدان مغناطیسی استاتور ( بخش ثابت ) توسط یک سیمپیچ یا آهنرباهای دائم به وجود میآید به طور کلی موتورهای براش DC ارزان و کوچک هستند و به راحتی کنترل میشوند.
2.موتور براشلس یا بدون جاروبک :
این نوع از موتورها ، یک جریان مغناطیسی را در روتور به وسیلهی آهنرباهای دائمی به وجود میآورند موتورهای براشلس کوچکتر از موتورهای براش هستند اما گرانقیمتتر میباشند چرا که از سوییچهای اثر هال در استاتور خود بهره میبرند اما مشخصه گشتاور / سرعت بهتری دارند و کارایی و طول عمرشان نسبت به موتورهای براش بیشتر است.
3.سروو موتور :
این نوع از موتور به طور پایه همان موتور DC براش است با این تفاوت که دارای یک نوع کنترل فیدبک موقعیت است که به شفت روتور متصل شده است سروو موتورها معمولاً به یک کنترلر PWM متصل و توسط آن کنترل میشوند و غالباً در سیستمهای کنترل موقعیت و مدل هایی که با امواج رادیویی کنترل میشوند کاربرد دارند.
یک موتور DC معمولی غالباً مشخصات خطی دارد و سرعت چرخش توسط ولتاژ DC که به موتور اعمال میشود تعیین میگردد . گشتاور خروجی نیز توسط جریانی که از سیمپیچهای موتور میگذرد مشخص میشود سرعت چرخش موتورهای DC بر حسب (RPM) (Revolution Per Minute) تعیین میگردد و با اتصال موتور به یک گیربکس یا ریل میتوان گشتاور و سرعت را توسط گیربکس تغییر داد.
موتورهای DC براش
موتورهای DC براش معمولی از دوبخش تشکیل شدهاند بخش متحرک (روتور) و بخش ثابت (استاتور).
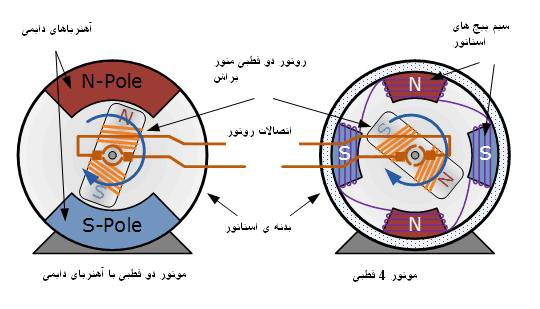
بخش استاتور یک مدار آهنربای الکتریکی میباشد که شامل چند سیمپیچ است که به یکدیگر به صورت حلقهای متصل شدهاند تا چند قطب شمال و جنوب متوالی را به وجود بیاورند جریانی که از این سیمپیچها میگذرد جریان میدان موتور نام دارد.
این سیمپیچهای الکترومغناطیسی که میدان استاتور را به وجود میآورد میتوانند به صورت سری ، موازی یا ترکیبی ( سری ـ موازی ) با روتور در مدار قرار گیرند در موتورهای DC سری، سیمپیچهای استاتور به صورت سری به روتور یا آرماتور متصل شده اما در موتورهای DC شانت (Shunt DC Motor) سیمپیچهای استاتور به صورت موازی با روتور نصب شدهاند.
موتورهای DC و شانت
روتور یا آرماتور یک موتور DC شامل هادی های حامل جریان الکتریکی است که به یکدیگر متصل شدهاند و روی بخشهای ایزوله شده ی مسی به نام کموتاتور (Commutator) قرار گرفتهاند کموتاتور اجازه میدهد در هنگام چرخش روتور یک اتصال الکتریکی با براش های کربنی به وجود بیاید.
میدان مغناطیسی که توسط روتور به وجود میآید، سعی میکند خودش را با میدان مغناطیسی استاتور تطبیق دهد تا روتور و استاتور حول یک محور مشابه دوران داشته باشند اما به دلیل تاخیراتی که به وجود میآید این امر میسر نخواهد بود.
سرعت موتور وابسته به قدرت میدان مغناطیسی روتور و ولتاژی است که به موتور اعمال میشود به عبارت دیگر با افزایش ولتاژ و متعاقباً افزایش قدرت میدان مغناطیسی روتور سرعت موتور نیز افزایش مییابد.
یک موتور DC براش معمولی
آهنربای دائمی که در موتور براش DC به کار میرود به طور کلی خیلی کوچکتر و ارزانتر از معادل براشلس و سروو است. در دیگر موتورها سیمپیچ ها با آهنرباهایی از جنس ( ساماریوم کبالت (Samarium Cobalt) یا نئودایمیوم آهن (Neodymium Iron) جایگزین شدهاند که میدان مغناطیسی فوقالعاده قویای دارند.
استفاده از آهنرباهای دائمی به موتورهای DC اجازه میدهد که نرخ سرعت / گشتاور خطی تری داشته باشند چرا که میدان مغناطیسی ثابت و قوی است در نتیجه موتورهای DC با آهنرباهای دائمی برای ربات ها و خیلی مصارف دیگر مناسبتر هستند.
با وجود اینکه موتورهای DC براش خیلی کارآمد و ارزان هستند، ممکن است مشکلاتی را نیز به وجود بیاورند از جمله اینکه اگر بار توان بالایی به آنها متصل شود امکان جرقه زدن بین کموتاتور و براش های کربنی وجود دارد که باعث ایجاد نویز، افزایش دما و کاهش طول عمر موتور میشود. در ضمن قطعات نیمهرسانایی که به موتور متصل هستند نیز ممکن است آسیب ببینند برای غلبه بر این معایب موتورهای DC براشلس به بازار عرضه شدند.
موتورهای براش لس DC
موتورهای براشلس DC شباهت زیادی به موتورهای DC با آهنرباهای ثابت دارند اما هیچ براشی ندارند و همین مسأله باعث میشود که بر اثر جرقه زدن کموتاتور آسیب نبینند و در نتیجه طول عمر بیشتری داشته باشد. طراحی موتور براشلس نیاز به براش ها را با در نظر گرفتن یک مدار درایو پیچیدهتر بر طرف کرده در مدار موتور DC براشلس، میدان مغناطیسی روتور از یک اهنربای دائمی به دست میآید که همیشه با میدان استاتور سنکرون میباشد و همین مسأله باعث تولید سرعت دقیقتر و کنترل گشتاور بهتری میشود.
ساختار یک موتور DC براشلس خیلی به موتور AC شباهت دارد و همین مسأله این موتور را تبدیل به یک موتور سنکرون میکند اما موتور براش لس نسبت به موتورهای معمولی فوقالعاده گران هستند.
کنترل موتورهای براش لس DC تفاوت زیادی با موتورهای DC براش دارد در این موتور برای تشخیص قطب شمال و جنوب و موقعیت روتور از سنسور اثر هال استفاده میشود البته گونه هایی از موتورهای براشلس نیز وجود دارند که دارای سنسورهای نوری هستند.
با استفاده از سنسورهای اثر هال پلاریته آهنرباهای مغناطیسی توسط مدار کنترل موتور تغییر میکند و به این وسیله میتوان موتور DC را به راحتی با یک سیگنال کلاک دیجیتال سنکرون کرد تا روی سرعت موتور کنترل کاملی داشته باشیم موتورهای DC براشلس میتوانند به دو صورت ساخته شوند :
یا به وسیله ی یک روتور که دارای یک آهنربای خارجی و یک استاتور که دارای آهنربای الکتریکی داخلی است یا به وسیله ی یک روتور که دارای یک آهنربای دائمی داخلی و یک استاتور که دارای آهنربای الکتریکی خارجی است.
موتورهای براشلس کارایی بالاتری نسبت به موتورهای براش دارند در ضمن مطمئنتر هستند و کم بودن نویز، کنترل عالی سرعت و سرعت بالاتر آنها را به گزینههای مناسب تری نسبت به موتور براش تبدیل میکند. به هر حال آنها در مقایسه با موتورهای براش گرانتر هستند و کنترل شان خیلی دشوارتر میباشد.
سروو موتور DC
از سروو موتورهای DC برای مدارهای حلقه بسته استفاده میشود که در آنها از موقعیت محور خروجی یک فیدبک گرفته و به مدار کنترل موتور ارسال میشود. المانهایی که از آنها برای گرفتن فیدبک استفاده میشود عبارتند از : انکدرها و پتانسیومترها که در مدل هایی که با امواج رادیویی کنترل میشوند مانند هواپیماها ، کشتیها و … کاربرد دارند.
یک سروو موتور دارای یک گیربکس داخلی میباشد که به وسیله ی آن سرعت و گشتاور را تعیین میکند محور خروجی یک سروو موتور نمیتوانند همانند محور موتور های DC به راحتی بچرخد چرا که گیربکس و المانهای فیدبک به یکدیگر چسبیدهاند.
دیاگرام یک سروو موتور DC
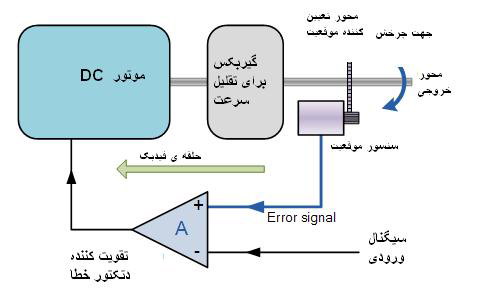
یک سروو موتور متشکل از یک موتور DC، گیربکس ،سیستم فیدبک و بخشهای تخصیص خطا میباشد. سرعت یا موقعیت موتور به وسیله سیگنال ورودی یا سیگنال مربعی که به موتور اعمال میشود کنترل خواهد شد.

یک تقویت کننده تشخیص خطا به سیگنال ورودی نگاه و آن را با سیگنال فیدبکی که از خروجی موتور دریافت میکند مقایسه و سپس تعیین میکند که آیا محور در جهت درست قرار گرفته یا نه اگر محور خطا داشته باشد یک کنترلر با استفاده از بالا بردن یا کند کردن سرعت موتور آن را تصحیح میکند داشتن فیدبک به این معناست که سروو موتور در یک سیستم حلقه بسته راهاندازی میشود .
علاوه بر مصارف صنعتی بزرگ ، از سروو موتورها در ربات های ریموت کنترل نیز استفاده میشود اکثر سروو موتورها میتوانند گردش ۱۸۰ درجهای در هر دو جهت را تجربه کنند به هر حال سروو موتورهای RC قادر نیستند که به طور پیوسته با سرعت بالا حرکت کنند مگر آنکه طراحی خاصی داشته باشند .
یک سروو موتور شامل چندین المان است که در یک پکیج قرار گرفته: موتور، گیربکس، فیدبک و دستگاه تصحیح سرعت، موقعیت و جهت از سروو موتور در رباتها و اجسام متحرک کوچک استفاده میشود و برای راهاندازی تنها به اتصال ۳ سیم ( پاور ، زمین و سیگنال کنترل ) نیاز دارند.
سوییچینگ و کنترل موتور DC
موتورهای DC کوچک میتوانند از طریق سوییچهای کوچک، رلهها، ترانزیستورهای دوقطبی یا ماسفت به سادهترین شکل ممکن ( کنترل خطی ) کنترل بشوند. برای کنترل خطی نیاز به یک ترانزیستور دو قطبی به عنوان سوییچ است ( البته میتوان از یک ترانزیستور دارلینگتون نیز برای کاربردهای جریان بالا استفاده نمود .)
با تغییر میزان جریان بیس، سرعت موتور میتواند کنترل شود. به عنوان مثال ترانزیستور میتواند طوری تنظیم شود که تنها نیمی از ولتاژ تغذیه نصیب سروو موتور شود. اما اگر ترانزیستور به حالت اشباع برود تمام ولتاژ تغذیه به موتور میرسد و موتور با حداکثر سرعت خواهد چرخید.
کنترل سرعت موتور
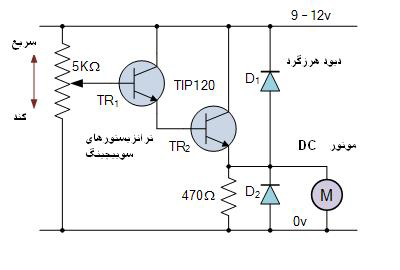
شکل بالا یک مدار را برای کنترل تک جهته سرعت نشان میدهد از آن جایی که سرعت چرخش یک موتور DC متناسب یا ولتاژی است که به ترمینال هایش وارد شده ما میتوانیم با استفاده از یک ترانزیستور این ولتاژ را تنظیم کنیم.
دو ترانزیستور به صورت زوج دارلینگتون برای کنترل جریان روتور به یکدیگر متصل شدهاند و از یک پتانسیومتر ۵KΩ برای کنترل جریان بیس ترانزیستور اول TR1 استفاده شده است ترانزیستور اول، ترانزیستور دوم را کنترل میکند و اجازه میدهد ولتاژی که به موتور اعمال میشود از صفر تا VCC تغییر کند.
همچنین تعدادی دیود هرزگرد میتوانند به ترانزیستور دوم متصل شوند تا نیرو محرکه القایی موتور به ترانزیستور آسیب نرساند. همچنین میتوان موتور را با استفاده از سیگنال دیجیتال راهاندازی کرد. موتور با سطح بالای سیگنال (یک) در حالت کاملاً روشن قرار میگیرد و سطح پایین سیگنال نیز موتور را به حالت خاموش میبرد.
از مداری مشابه میتوان برای کنترل سرعت چرخش موتور استفاده کرد اگر موتور با سیگنال فرکانس بالا خاموش و روشن شود موتور با سرعت معین گردش میکند. سرعت گردش وابسته به دیوتی سایکل (Duty Cycle) ( نسبت زمان روشن بودن به زمان یک سیکل کامل ) سیگنال ورودی میباشد.
کنترل سرعت توسط پهنای پالس
در گذشته عنوان شد که سرعت گردش یک موتور DC وابسته به میانگین ولتاژی است که به ترمینالهای آن اعمال میشود. هر چقدر میانگین ولتاژ بالاتر باشد موتور با سرعت بیشتری میچرخد. اگر نسبت زمان روشن بودن به زمان خاموش بودن تغییر کند سرعت موتور نیز تغییر خواهد کرد برای درایوهای تک قطبی ساده نرخ دیوتی β به صورت زیر محاسبه میشود.
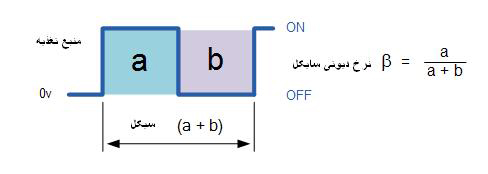
میانگین ولتاژ DC خروجی که موتور را تغذیه میکند با فرمول VMEAN=β*VSUPPLY محاسبه خواهد شد. بنابراین با تغییر پهنای پالس ، ولتاژ منبع تغذیه میتوان یک موتور را کنترل کرد و به این نوع کنترل، مدولاسیون پهنای پالس یا PWM (Pulse Width Modulation) گفته میشود.
یکی دیگر از راههای کنترل سرعت چرخش موتور، تغییر فرکانس سیگنال ورودی در حالیکه دیوتی سایکل آن ثابت میباشد است. این روش به PFM (Pulse Frequency Modulation) یا مدولاسیون فرکانس پالس معروف است.
به وسیله ی مدولاسیون فرکانس، ولتاژ موتور توسط اعمال پالس هایی با فرکانس های مختلف کنترل میشود به عنوان مثال اگر فرکانس سیگنال ورودی خیلی پایین باشد، میانگین ولتاژی که به موتور اعمال میشود پایین است و بنابراین سرعت موتور کم خواهد بود. در فرکانس های بالاتر میانگین ولتاژ بالا میرود و در نتیجه سرعت موتور نیز افزایش مییابد.
سپس از ترانزیستورها میتوان برای کنترل میزان توانی که به موتور DC اعمال میشود؛ استفاده کرد.
تغییر جهت یک موتور DC
در حالیکه کنترل سرعت یک موتور DC به وسیلهی یک ترازیستور مزایای زیادی دارد، مشکلاتی را نیز به وجود میآورد از جمله اینکه جهت چرخش هرگز قابل تغییر نمی باشد. در بسیاری از موارد ما نیاز داریم تا موتور قادر باشد هم در جهت ساعتگرد و هم در جهت پادساعتگرد گردش کند.
برای کنترل جهت گردش یک موتور DC پلاریته ولتاژی که به موتور اعمال شده باید معکوس گردد. این امر به نوبه خود محور را قادر میکند تا در جهت مخالف بچرخد. یک روش آسان برای کنترل جهت گردش یک موتور DC استفاده از سوییچهای متفاوت است که چیدمانی به صورت زیر دارند :
کنترل جهت موتور DC
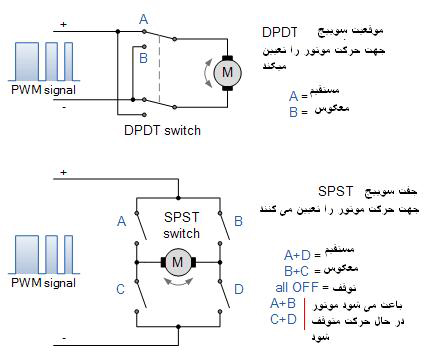
اولین مدار از یک سوییچ دو پل دو مسیره (DPDT) برای کنترل پلاریته اتصالات موتور استفاده میکند اگر پلاریته ولتاژ المانی به موتور معکوس شود، جهت حرکت موتور نیز تغییر میکند. مدار دوم کمی پیچیدهتر میباشد و از ۴ کلید تک پل تک مسیره (SPST) که در پیگربندی (H) به یکدیگر متصل شدهاند استفاده میکند.
سوییچهای مکانیکی به صورت جفت دستهبندی میشوند و باید با هماهنگی خاصی با یکدیگر کار کنند تا یک موتور DC را راهاندازی کنند به عنوان مثال ترکیب سوییچ A+D گردش مستقیم را کنترل میکند. در حالیکه B+C یا A+B باعث اتصال کوتاه ترمینالهای موتور و در نتیجه توقف ناگهانی آن میشود. در ضمن ترکیب B+C باعث میشود که موتور در جهت معکوس بچرخد استفاده از سوییچها در این ترکیببندی خطرات خودش را دارد. اگر ترکیب A+C یا B+D انتخاب شود ، منبع تغذیه نیز اتصال کوتاه خواهد شد که ممکن است باعث جرقه و آسیب به منبع و موتور شود.
در حالیکه دو مدار بالا برای اکثر موتورهای کوچک به خوبی کار میکنند، میتوان از روشهای دیگری نیز برای کنترل موتور بهره برد. ما میتوانیم سوییچهای دستی را با رله های الکترومغناطیسی جابه جا کنیم یا از یک CMOS حالت جامد استفاده کنیم.
یکی دیگر از راههایی که برای کنترل دو جهته موتور استفاده میشود این است که موتور را به یک مدار ترانزیستور پل H متصل کنیم برای درک بیشتر این قضیه به شکل زیر نگاه کنید.
مدار دو جهته پل H
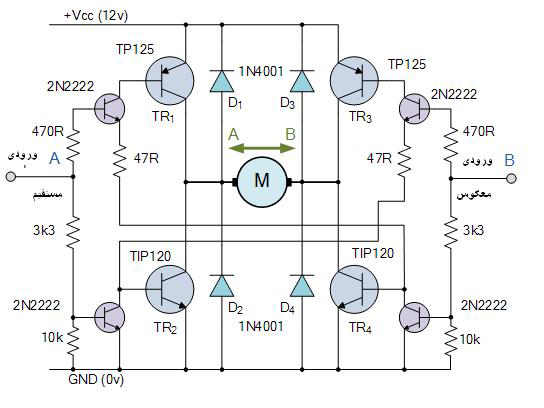
مدار دو جهته پل H که در بالا مشاهده میشود حالتی شبیه به حرف H دارد و میتواند متشکل از ۴ سوییچ ( رلههای الکترومکانیکی یا ترانزیستور ) باشد و موتور در مرکز واقع شده است. ترانزیستور یا ماسفت پل H یکی از رایج ترین انواع مدارات کنترل موتور DC دو جهته میباشد این مدار از جفتهای مکمل ترانزیستور (NPN و PNP) در هر شاخه استفاده میکند.
ورودی کنترل A موتور را در جهت جلو راهاندازی میکند و ورودی کنترل B موتور را در جهت معکوس راهاندازی میکند و با خاموش و روشن شدن جفت ترانزیستورهای مورب میتوان کنترل جهت موتور را به دست گرفت.
به عنوان مثال ، هنگامی که ترانزیستور TR1 روشن میباشد و ترانزیستور TR2 خاموش است نقطه A به ولتاژ تغذیه (VCC+) متصل میشود و اگر ترانزیستور TR2 خاموش باشد نقطه A به ولتاژ تغذیه متصل خواهد شد و اگر ترانزیستور TR3 خاموش باشد. ترانزیستور TR4 روشن باشد نقطه ی B به زمین اتصال پیدا میک ند سپس موتور در یک جهت شروع به چرخش خواهد کرد و ترمینال A موتور مثبت و ترمینال B منفی خواهد شد حال اگر جریان سوییچینگ معکوس شود یعنی TR1 خاموش و TR2 و TR3 روشن و TR4 خاموش شود موتور در جهت معکوس به حرکت درمیآید چرا که جهت جریان نیز معکوس شده.
در نتیجه با اعمال سطوح منطقی معکوس ”یک’’ یا ”صفر” به ورودی A و B جهت چرخش موتورها میتواند به صورت زیر کنترل شود .
جدول منطقی مدار پل H
|
عملکرد موتور
|
ورودی B
|
ورودی A
|
|---|---|---|
|
|
TR2 و TR3
|
TR1و TR4
|
|
خاموش
|
0
|
0
|
|
ساعتگرد حرکت میکند
|
0
|
1
|
|
پاد ساعتگرد حرکت میکند
|
1
|
0
|
|
منفجر می شود! ( از این ترکیب هرگز نباید استفاده کرد)
|
1
|
1
|
باید این نکته را در نظر داشته باشیم که جز ترکیب ورودیهای بالا هیچ ترکیب دیگری مجاز نخواهد بود چرا که ترکیبات دیگر باعث اتصال کوتاه شدن منبغ تغذیه میشوند.
همانند کنترل موتورهای DC تک جهته که در بالا بررسی شده سرعت گردش موتور میتواند از طریق مدولاسوین پهنای باند یا PWM کنترل شود سپس با ترکیب مدار پل H و PWM هم جهت و هم سرعت موتور به راحتی قابل کنترل خواهد بود.
گروهی از دیکدرها مانند SN754410 ( مدار مجتمع پل H) یا L298N که مدار مجتمعی با ۲ پل H است برای مدارات کنترل موتور طراحی شدهاند.
استپ موتور جریان مستقیم
همانند موتورهای DC، استپر موتورها نیز عملگرهای الکترومکانیکی هستند که پالسهای دیجیتال را به حرکت پلهای تبدیل میکنند. استپر موتورها یا موتورهای پلهای در خیلی از مدارات کنترل صنعتی مورد استفاده قرار میگیرند. یک استپر موتور گونهای از موتور براشلس سنکرون است که روتورش دارای کموتاتور یا براش کربنی نیست. روتور این موتورها از چندین آهنربای دائم ساخته شده که به صورت دندانهای هستند.
همانطور که از نام آن پیداست ؛ استپ موتور حرکتی پیوسته ندارد و پله ای حرکت می کند زاویه این حرکت پله ای وابسته به تعداد قطب های استاتور و دندانه های روتور است .
استپ موتور در هر حرکت زاویه یکسانی را طی میکند به عنوان مثال یک استپ موتور ممکن است در هر حرکت ۳ یا ۷ درجه جابه جا شود و میتوان گفت اگر یک استپ موتور در هر حرکت پله ای ۳/۶ درجه جابه جا شود در ۱۰۰ حرکت ۳۶۰ درجه جابه جا خواهد شد ( یک دور کامل را زده است ) زاویه حرکتهای موتور به این صورت محاسبه میشود که یک موتور میتواند با چند حرکت پله ای یک دور کامل را بزند .
موتورهای استپ به ۳ نوع اصلی تقسیم میشوند :
موتور با رلوکتانس متغیر ( Variable Reluctance )
موتور با آهنربای دائم (Permanent Magnet)
موتور هیبرید که ترکیب دو موتور بالا میباشد (Hybrid)
استپر موتورها برای کاربردهایی که در آن موقعیت باید به درستی تعیین شود، بسیار مناسب هستند. در ضمن اینگونه موتورها پاسخ سریعی دارند و به سرعت حرکت را آغاز، متوقف و یا جهت حرکت را تغییر میدهند.
به طور کلی استپر موتورها دارای یک روتور داخلی میباشند که تعداد زیادی آهنربای دائمی دندانهدار روی آن قرار دارد. همچنین روی استاتور نیز دندانههای الکترومغناطیسی زیادی تعبیه شده است.
آهنرباهای الکتریکی استاتور ها با یک ترتیب خاص باردار و تخلیه میشوند و باعث میشوند که روتور یک حرکت پله ای داشته باشد.
استپ موتورهای مدرن چند قطبی، چند دندانه میتوانند حرکت با زاویه ای فوقالعاده کم ( ۰/۹ درجه در هر حرکت) داشته باشند و به طور کلی برای سیستمهای موقعیت یابی فوقالعاده دقیق مانند هد های مغناطیسی فلاپی ها یا هارد دیسک ها مورد استفاده قرار میگیرند یکی از انواع رایج استپ موتور که یک دور کامل را در ۲۰۰ حرکت طی میکند دارای یک روتور با ۵۰ دندانه، یک استاتور ۴ فاز و زاویه حرکت ۱/۸ درجه میباشد.
ساختار و کنترل استپ موتور
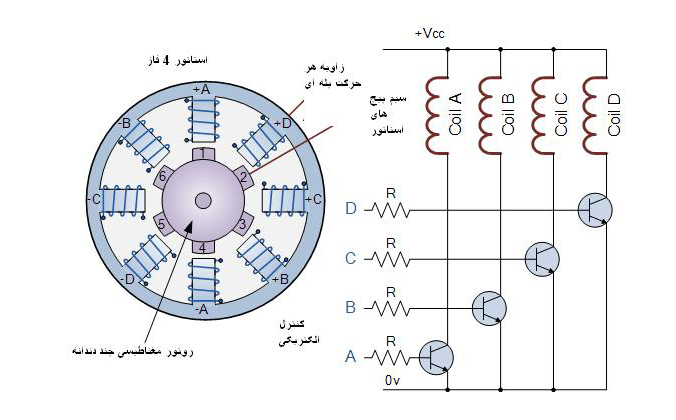
در مثال بالا یک موتور رلوکتانس متغیر به تصویر درآمده این موتور ترکیبی از یک روتور مرکزی است که توسط ۴ سیم پیچ الکترومغناطیسی A،B،C وD احاطه شده شارژ شدن هر سیم پیچ باعث میشوند که روتور مغناطیسی خودش را با آن هماهنگ کند.
با اعمال ولتاژ به هر سیم پیچ، روتور به آن جهت میچرخد و اگر سیم پیچ ها به ترتیب باردار شوند یک حرکت دورانی به وجود خواهد آمد.
درایور استپ موتور، زاویه حرکت و سرعت موتور را با شارژ کردن سیم پیچها در ترتیبی خاص مشخص میکند به عنوان مثال DCBA و اگر ترتیب شارژ کردن سیم پیچها تغییر کند به عنوان مثال ABCD جهت چرخش موتور نیز تغییر خواهد کرد.
در مثال بالا استپ متور ۴ سیم پیچ دارد که یک موتور ۴ فاز را میسازد. تعداد قطبهای استاتور به صورت (۲*۴=۸) محاسبه میشود که با فاصله ۴۵ درجه از یکدیگر قرار گرفتهاند و تعداد دندانه های روی روتور ۶ عدد است که با فاصله ۶۰ درجه از یکدیگر میباشند. بنابراین ۶ دندانه * ۴ سیم پیچ =۲۴ موقعیت محتمل یا استپ برای روتور وجود دارد که یک دور کامل بچرخد.
زاویه هر حرکت برای متوری با مشخصات بالا به صورت ۳۶۰/۲۴=۱۵ محاسبه میشود .
مسلم است که هر چقدر تعداد دندانههای روتور و استاتور بیشتر باشد، متور حرکت روانتر و قابل کنترلتری خواهد داشت. همچنین اتصال سیمپیچهای الکتریکی یک موتور به یکدیگر به حالتهای مختلف مسیر خواهد بود.
همچنین میتوان سرعت چرخش یک استپ موتور را به وسیلهی تغییر بازه تأخیر زمانی بین پالس های دیجیتالی که به سیمپیچها اعمال میشود ( تغییر فرکانس پالس ) تغییر داد هر چه فرکانس پایینتر باشد، حرکت متور کندتر میشود. با اعمال یک سری پالس های ثابت به موتور، محور موتور حول زاویه ای خاص دوران میکند.
مزایای استفاده از سیگنال پالسی این است که دیگر نیازی به فیدبک اضافی نخواهد بود چرا که با شمردن تعداد پالس هایی که به موتور میرسد موقعیت نهایی روتور کاملاً مشخص میشود. خروجی پالس به ما اجازه میدهد تا موتور را در یک سیستم حلقه باز راهاندازی کنیم که از نظر کنترلی ارزان و راحتتر میباشد.
به عنوان مثال فرض کنید استپ موتور بالا زوایه حرکت ۳/۶ درجه داشته باشد برای حرکت متور به میزان ۲۱۶ درجه تنها کافی است از فرمول زیر استفاده کنیم : (۳۱۶ درجه/ ۳/۶ درجه / هر حرکت)=۸۰ که در اینجا با اعمال ۸۰ پالس به سیمپیچهای استاتور موتور در جایگاه دلخواه قرار میگیرد.
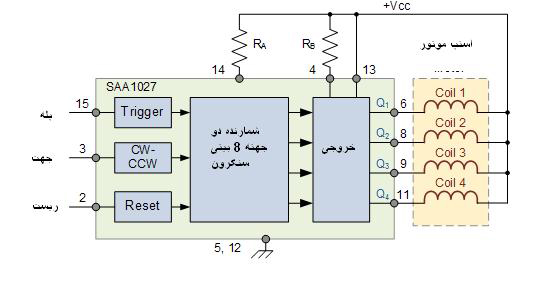
همچنین ICهای کنترلر استپ موتور متنوعی در دسترس میباشند که میتوانند سرعت گردش و جهت موتور را کنترل کنند یکی از این نوع ICها SAA1027 نام دارد که سیگنال های درست و مناسب را به ترتیب به موتور ارسال خواهد کرد.
همچنین جهت گردش میتواند به صورت چرخش بدون استپ انتخاب شود. اما این انتخاب به کنترلر فشار وارد میکند. اگر از کنترلر دیجیتال ۸ بیتی استفاده شود میتوان هر استپ را به ۲۵۶ استپ کوچکتر تقسیم کرد ..
تراشه کنترل استپ موتور SAA1027
در این مقاله در مورد راهاندازهای دوار مانند موتورهای براش و براشلس DC، سروو موتورها و استپ موتور صحبت شد. در مقاله ی بعد به المانهای خروجی میپردازیم که سیگنالهای الکتریکی را با استفاده از امواج الکترومغناطیسی به امواج صوتی تبدیل میکنند. اینگونه المانها بلندگو یا اسپیکر نام دارند.



