
رابطهای ورودی به سنسورها اجازه میدهند که با کامپیوترها و میکروکنترلرها ارتباط برقرار کنند
رابطها راهی برای اتصال دستگاهها به یکدیگر هستند مدارات رابط ورودی به ما اجازه میدهند که خروجی و ورودی دو مدار مختلف را با هم تطبیق دهیم تا آنها بتوانند با یکدیگر کار کنند.
اما رابطها فقط برنامههای کامپیوتری و پراسسورها نیستند در حالیکه کامپیوترها از پورت های تک جهته یا دو جهته استفاده میکنند؛ بسیاری از مدارات سادهی الکترونیکی میتوانند برای برقرای ارتباط با دنیای واقعی مورد استفاده قرار گیرند.

برای اینکه یک مدار الکتورنیکی یا میکروالکترونیکی کارآمد باشد باید بتواند با دنیای واقعی ارتباط برقرار کند. مدارات رابط ورودی مدارهای الکترونیکی مانند آپ امپها ، دروازههای منطقی و … را به دنیای خارجی مرتبط میکنند .
مدارات الکترونیکی با تقویت کردن و یا پردازش سیگنالهایی که از سنسور یا سوییچها دریافت میکنند آن را به طرق مختلف به المانهای خروجی مانند رلهها و راهاندازها می فرستند تا دستگاههای دیگری را کنترل کنند .
وظیفهی مدارات رابط ورودی تبدیل خروجی یک مدار به سیگنالی قابل استفاده برای مدار دیگر میباشد.
سنسورهای ورودی، اطلاعاتی را در مورد محیط پیرامون در اختیار مدار قرار میدهند. به عبارتی دیگر پارامترهای فیزیکی مانند دما، فشار یا موقعیت که غالباً آنالوگ هستند؛ توسط سنسورهای ورودی دریافت میشوند و پس از اینکه پردازش های مورد نیاز روی آنها انجام شد به حالت دلخواه درمیآیند و روی خروجی مدار قرار میگیرند ( سیگنال خروجی معمولاً با سیگنال ورودی تناسب دارد ).
بسیاری از سنسورها که از آنها در مدارات الکترونیکی استفاده میشود مقاومت خودشان را برحسب سیگنال ورودی تغییر میدهند. مانند ترمیستورها و مقاومتهای وابسته به نور. این آلمانها همگی در دستهی المانهای ورودی طبقه بندی میشوند.
انواع مدارات رابط ورودی
سادهترین و رایجترین مدار رابط رودی دکمه فشاری است. این نوع دکمهها ارزانقیمت هستند و به راحتی با مدارات مختلف تطبیق پیدا میکنند.
چگونه از یک سوییچ به عنوان رابط استفاده کنیم ؟
سوییچها و دکمههای فشاری المانهای مکانیکی هستند که ۲ یا چند کانتکت الکتریکی دارند. هنگامی که یک سوییچ در حالت قطع یا مدار باز قرار دارد کانتکتها به یکدیگر متصل نیستند و هنگامی که سوییچ بسته میشود کانتکتها به یکدیگر اتصال پیدا میکنند.
رایجترین راه برای اتصال یک دکمهی فشاری به یک مدار الکترونیکی استفاده از مقاومت Pull_Up است در این روش دکمه از طریق یک مقاومت Pull_Up به منبع تغذیه متصل میشود هنگامی که دکمه فشار داده نشده ۵ ولت یا سطح منطقی یک به خروجی اعمال میشود اما اگر دکمه فشار داده شود، خروجی به زمین اتصال پیدا میکند و سطح منطقی خروجی صفر خواهد شد.
درنتیجه بسته به وضعیت سوییچ، خروجی سطح بالا یا سطح پایین تولید میشود یک مقاومت Pull_Up برای نگه داشتن سطح ولتاژ در مقدار مورد نیاز ضروری میباشد چرا که از اتصال کوتاه شدن منبع تغذیه توسط سوییچ در حالت مدار بسته جلوگیری میکند.
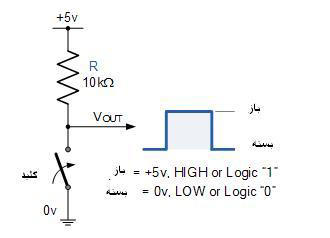
اندازهی مقاومت Pull_Up وابسته به جریان مدار در حالتی است که سوییچ باز میباشد. به عنوان مثال اگر سوییچ باز باشد؛ جریان از طریق مقاومت به ترمینال VOUT شارش میکند و با عبور جریان افت ولتاژی روی دو سر مقاومت به وجود میآید.
اگر ما فرض کنیم که یک دروازهی منطقی TTL به سیگنال ورودی سطح بالا نیاز دارد و جریان ۶۰ میکروآمپر میباشد افت ولتاژ در دو سر مقاومت به صورت زیر محاسبه میشود :
µa60 µa*10 KΩ=0.6 V
و بر این اساس تنها ۴.۴ ولت به خروجی میرسد البته این خروجی و افت ولتاژ برای دروازههای منطقی TTL قابل قبول میباشد.
یک سوییچ یا دکمه فشاری میتواند در حالت”فعال بالا” قرار گیرد در این حالت جای سوییچ و مقاومت عوض میشود تا سوییچ بین ۵ ولت تغذیه و خروجی قرار بگیرد به مقاومت در اینجا مقاومت Pull_Down گفته میشود که به خروجی و زمین متصل است.
در این پیکربندی، هنگامی که سوییچ باز است، سیگنال خروجی (Vout) برابر با صفر میباشد ( سطح منطقی صفر) و اگر سوییچ بسته باشد سطح خروجی بالا می رود( ولتاژ ۵ ولت در خروجی خواهیم داشت).
بر خلاف مقاومت Pull_Up که از آن برای محدود کردن جریان استفاده میشود هدف اصلی مقاومت Pull_Down این است که ولتاژ خروجی را از نوسان مصون بدارد.
در نتیجه از مقاومت فوقالعاده کوچکی برای حالت Pull_Down استفاده میشود و افت ولتاژ در دو سر این مقاومت ناچیز خواهد بود اما باید این نکته را در نظر داشت که مقاومت Pull_Down نباید خیلی کوچک باشد چرا که در این صورت ممکن است جریان فوقالعاده زیادی از آن عبور کند و هنگامی که سوییچ بسته است توان تلفاتی زیادی شود.
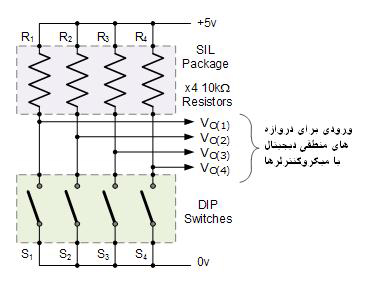
سوییچ DIP
علاوه بر قرار دادن سوییچهای تکی در مدار به عنوان رابط میتوانیم از سوییچهای زیادی به صورت صفحهکلید یا DIP در کنار هم استفاده کنیم.
سوییچهای DIP (Dual in Line) سوییچ های منحصر به فردی هستند که به صورت چهارتایی یا هشت تایی در یک پکیچ قرار گرفتهاند. این حالت سوییچهای DIP را قادر میسازد تا به راحتی در سوکتهای IC ها قرا بگیرند یا از طریق سیمکشی به یک مدار یا برد بورد (Bread Board) متصل شوند.
هر سوییچ یا کلیدی که در پکیج DIP قرار گرفته وضعیت ON و OFF دارد و برای یک پکیچ DIP که دارای ۴ کلید است ۴ خروجی تعریف شده البته میتوان پکیجهای DIP را به یکدیگر متصل کرد و تعداد حالتهای خروجی بیشتری را به وجود آرود .
مدارهای رابط که دچار مشکل پرش سوییچ میشوند
استفاده از سوییچهای مکانیکی فوقالعاده رایج است چرا که ارزانقیمت هستند و به راحتی میتوانند به عنوان رابط مورد استفاده قرار گیرند. به هر حال سوییچ های مکانیکی یک مشکل مشترک دارند به نام ”پرش کانتکتها” .
سوییچهای مکانیکی شامل دو تکه کانتکت فلزی هستند که به یکدیگر فشار داده میشوند تا یک مدار را راهاندازی کنند.
گاهی اوقات شرایطی به وجود میآید که کانتکتها، با سرعت خیلی زیاد مدام باز و بسته میشوند یا به عبارتی روی یکدیگر می جهند.
از آن جایی که کانتکتهای سوییچهای مکانیکی به صورتی طراحی شدهاند که خیلی سریع باز و بسته شوند اصطکاک خیلی کمی دارند و ممکن است روی هم لیز بخورند که در نتیجه حالت جهش ایجاد میشود این جهش باعث ایجاد یک سری پالس یا جهش ولتاژ خواهد شد و مدتی طول خواهد کشید تا سوییچها به طور قابل قبولی به یکدیگر اتصال پیدا کنند.
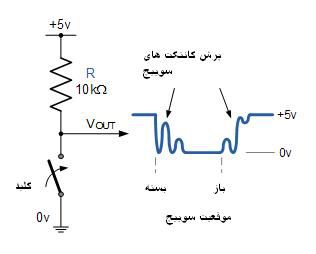
حالت موج که در جهش سوییچها به وجود میآید
مشکل این است که هر مدار الکترونیکی یا دیجیتال که از رابط سوییچ مکانیکی بهره میبرد با یک سری از سیگنالهای خاموش و روشن مواجه میشود که هر کدام چندین میلی ثانیه طول میکشند و در این شرایط یک سیگنال تک دریافت نمیشود. جهش کانتکتهای سوییچ های مکانیکی در هر دو حالت باز و بسته شدن ممکن است رخ دهد و این امر به نوبه خود سبب تخریب و افزایش مقاومت کانتکتها خواهد شد .
در هر صورت راههای زیادی وجود دارد که ما میتوانیم به وسیله آن مشکل جهش کانتکتها را حل کنیم یکی از این راهها استفاده از مدار حذف ریپل در ورودی میباشد سادهترین و ارزانترین مدار حذف ریپل یک مدار RC میباشد که در شکل زیر نشان داده شده :
مدار حذف ریپل RC
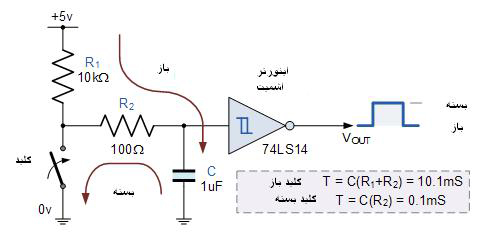
با اضافه کردن یک مقاومت ۱۰۰Ω دیگر و یک خازن ۱µF به سوییچها مشکل جهش کلید به طور کامل برطرف میشود ثابت زمانی RC که T میباشد باید طوری انتخاب شود که از زمان جهشهای کلید طولانیتر باشد. همچنین از یک بافر معکوس کنندهی اشمیت (Inverting Schmitt_Trigger Buffer) نیز میتوان برای تغییر سطح خروجی ( از بالا به پایین ) یا ( از پایین به بالا ) استفاده نمود .
شاید برایتان سؤال پیش بیاید که چگونه میتوان جهش کلیدها را گرفت ما در مقاله مدارهای RC توضیح دادیم که خازن با یک ثابت زمانی خاص (T) شارژ میشود مقدار ثابت زمانی به صورت زیر محاسبه میشود :
T=R*C
که مقدار مقاومت برحسب اهم خازن چیست؟م خازن بقدارر حسب فاراد میباشد .
حال فرض کنید که کلید در حالت بسته قرار دارد و خازن کاملاً دشارژ شده سطح ورودی اینورتر پایین است و سطح خروجی بالا میباشد هنگامی که سوییچ باز میشود، خازن از طریق مقاومت R1 و R2 با ثابت زمانی (R1+R2)C شارژ میشود .
شارژ تدریجی خازن باعث میشود که ریپل سیگنالی که به کلید میرسد گرفته شود و متعاقباً جهش کانتکتهای کلید نیز اتفاق نیافتد. هنگامی که بار ذخیره شده داخل صفحات خازن برابر یا بیشتر از پایینترین مقدار اختلاف پتانسیل ورودی سطح بالا (VIH) باشد ، وضعیت اینورتر تغییر میکند و سطح خروجی پایین میآید در این مثال مقدار ثابت زمانی ۱۰ms است و این زمان به کانتکتهای کلید فرصت میدهد تا بدون جهش در شرایط پایدار قرار بگیرند .
هنگامی که سوییچ بسته میشود خازنی که به طور کامل شارژ شده با سرعت T=R*C توسط مقاومت ۱۰۰Ω با ثابت زمانی CR2 دشارژ میشود و با تغییر وضعیت اینورتر سطح خروجی بالا میرود .
به هر حال شیوهی عملکرد سوییچ باعث میشود که کانتکتها کمی جهش داشته باشند و همین امر موجب میشود که خازن تمایل داشته باشد که به طور مداوم و سریع شارژ و دشارژ شود.
بنابراین باید مقدار ثابت زمانی مدار RC حداقل ۱۰ برابر ثابت زمانی دشارژ آن باشد خازن نمیتواند به سرعت شارژ شود و قبل از اینکه کلید به حالت ثابت بسته برسد، کاملاً شارژ شود بنابراین اینورتر سطح خروجی را بالا نگه میدارد و در نتیجه هر چقدر هم که کانتکتها جهش داشته باشند اینورتر میتواند که سیگنال صاف و بدون ریپل را برای ما به ارمغان بیاورد.
مدار لرزش گیر با استفاده از گیت های NAND
یکی از مزایای این مدار لرزشگیر این است که اگر کانتکتها خیلی جهش داشته باشد یا زمان جهش فوقالعاده طولانی باشد ثابت زمانی RC برای جبران زمان این جهش میتواند افزایش پیدا کند همچنین د.ر نظر داشته باشید که این تأخیر زمانی RC به این معنی است که شما باید قبل از اینکه بتوانید سوییچ را راهاندازی کنید باید کمی صبر کنید چرا که اگر این کار را انجام ندهید ، هیچ سیگنال خروجی دریافت نمیکنید .
این مدار لرزش گیر کاملاً مناسب کلیدهای (SPST) و مدارات الکترونیکی و میکروکنترلری میباشد، اما نقطه ضعف این مدار این است که ثابت زمانی RC باعث ایجاد یک تأخیر میشود و شما تنها پس از مدتی وقفه میتوانید دوباره عمل سوییچینگ را انجام دهید .
اگر عمل سوییچینگ خیلی سریع رخ دهد یا چندین کلید در قالب یک صفحهکلید وجود داشته باشند ، این تأخیر زمانی مشکل زا و اعصاب خردکن میشود یک راه برای غلبه بر این مشکل و داشتن مدار ورودی سریعتر این است که از دو گیت NAND که به صورت ضربدری در ورودی قرار گرفتهاند استفاده کنیم یا از دو گیت NOR به صورتی که در شکل زیر نشان داده شده بهره ببریم.
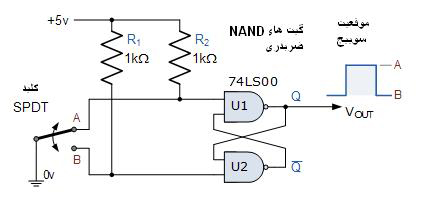
این مدار لرزشگیر تا حد زیادی شبیه به یک فلیپ فلاپ SR که در بخش مدار منطقی ترتیبی به آن پرداختیم عمل میکند دو گیت منطقی به صورت جفتی و ضربدری با ورودی فعال سطح پایین تشکیل یک مدار SR را دادهاند: در حالیکه دو گیت NAND در ورودی توسط دو مقاومت Pull_Up یک کیلو اهمی در سطح بالا (۵ ولت ) نگه داشته شدهاند .
هنگامی که مدار به صورت SR (Set_Reset) عمل میکند به یک کلید تک پل دو مسیره (SPDT) نیاز خواهد داشت و نمیتوان مانند مدار قبل از کلید (SPST) استفاده نمود .
هنگامی که سوییچ گیت های NAND که به صورت ضربدری اتصال یافتهاند در موقعیت A قرار دارد گیتNAND اول که U1 نام دارد ست میشود و در نتیجه خروجی در Q به سطح بالا میرود همچنین هنگامی که سوییچ به موقعیت B میرود گیت NAND دوم (U2) باعث ریست شدن U1 میشود و خروجی در Q به سطح پایین بازمی گردد .
حرکت سوییچ بین وضعیت A و B باعث تغییر سطح ولتاژ از بالا به پایین و از پایین به بالا میشود از آن جایی که مدار SRبه دو عمل سوییچ برای ست یا ریست شدن نیاز دارد هر گونه جهش کانتکتها چه در جهت بسته شدن چه در جهت باز شدن در نقطه ی Q احساس نمیشود یکی از مزایای این مدار لرزشگیر این است که میتواند خروجی های مکمل تولید کند .
علاوه بر استفاده از گیتهای NAND ضربدری که برای ساخت یک مدار رابط دو حالت ثابت استفاده میشود میتوان از گیتهای NOR که به صورت ضربدری به یکدیگر اتصال یافتهاند نیز استفاده کرد در این شرایط باید جای دو مقاومت عوض شود و مقدار مقاومت نیز به ۱۰۰Ω کاهش یابد برای فهم بهتر به شکل زیر نگاه کنید :
مدار لرزشگیر با گیت NOR
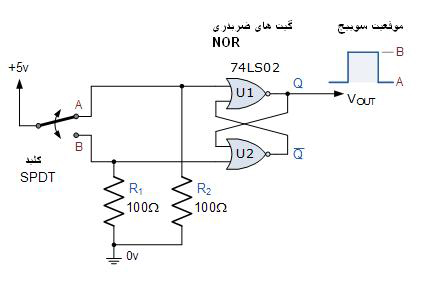
عملکرد این مدار شباهت زیادی به مدار گیتهای NAND دارد تنها تفاوت در این است که خروجی در نقطه ی Q هنگامی که سوییچ در موقعیت B است بالا میباشد و هنگامی که سوییچ در موقعیت A قرار میگیرد سطح خروجی پایین میآید به عبارتی دیگر این مدار بر عکس مدار گیت ضربدری NAND عمل میکند مدار گیت NAND برای تغییر وضعیت به سیگنال ورودی سطح پایین احتیاج دارد و مدار گیت NOR برای تغییر وضعیت نیازمند ورودی سطح بالاست.
ساخت رابطها با استفاده از المانهای نوری
اپتوکوپلر یک المان الکترونیکی میباشد که دارای یک LED است و مانند فتودیودها و فتوترانزیستورها نسبت به نور حساس میباشد.
در بخش قبلی گفته شد که یک اپتوکوپلر ۲ مدار الکتریکی مجزا را به یکدیگر متصل میکند به عبارتی دیگر ما به وسیلهی اپتوکوپلر میتوانیم ۲ مدار با ولتاژها و توانهای متفاوت را بدون اینکه تغییری در آنها اعمال کنیم به یکدیگر متصل کنیم .
کلیدهای نوری نوع دیگری از المانهای سوییچینگ نوری هستند و به کمک آنها میتوان مدارات فوقالعاده توان بالا را به میکروکنترلر ها ، PIC یا دیگر مدارات توان پایین متصل کرد در ضمن در برخی مواقع می خواهیم بدون اینکه هیچ اتصال الکتریکی بین دو مدار برقرار باشد آنها را تنها از طریق تشخیص نوری به یکدیگر متصل کنیم و اینامر با به کار بردن المانهای تشخیص نور میسر خواهد شد .
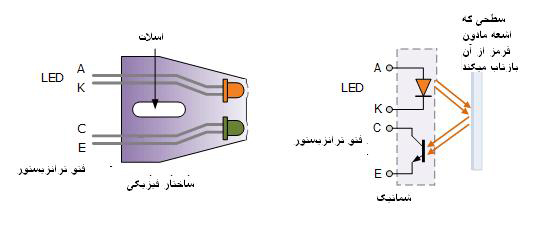
سوییچهای نوری انواع مختلفی دارند رایجترین نوع سوییچهای نوری برای تشخیص حرکت یا اشیاء ثابت به کار برده میشود/ فوتوترانزیستور یا پیکربندی ترانزیستورهای دارلینگتون اکثر ویژگیهای مورد نیاز برای فتوسوییچها را ارائه میدهند و بنابراین کاربرد فوقالعاده زیادی دارند .
سوییچ های نوری دارای اسلات
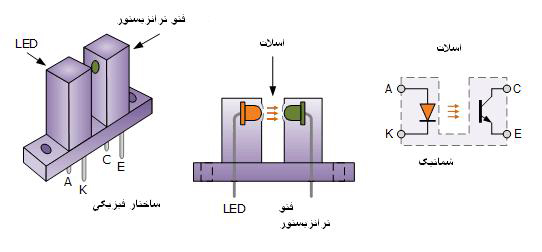
از ولتاژDC به طور کلی برای راه اندازی LED استفاده میشود که سیگنال ورودی را به اشعه ی مادون قرمز تبدیل میکند بازتاب اشعه ی مادون قرمز در فتوترانزیستور تجمع میکند و پس از تبدیل شدن به سیگنال قابل فهم برای دستگاههای مختلف ارسال خواهد شد .
برای سوییچهای نوری معمولی در حالتی که جریان ۵ تا ۲ میلی آمپر از آنها میگذرد افت ولتاژ بایاس مستقیم ۱/۲ تا ۱/۶ ولت میباشد و مقاومت دیود در حدود ۱۸۰ تا ۴۷۰ اهم خواهد بود .
مدار سوییچ نوری دارای اسلات
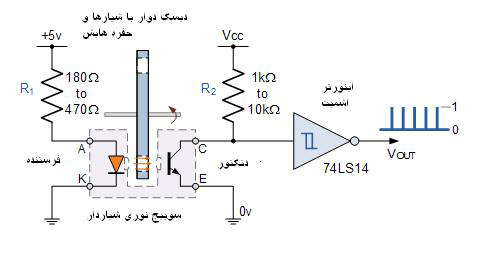
سنسورهای نوری که دارای دیسک های دوار و اسلات دار هستند. به صورت فراگیر در دیکدرهای موقعیت، انکدرهای محور و حتی در ماوسهای کامپیوتری که از گوی برای تشخیص حرکت استفاده میکنند؛ کاربرد دارند دیسک دوار دارای تعدادی شیار است که روی یک چرخ غیر شفاف تعبیه شده دیسکهای کدگزاری شدهی معمولی دارای نرخ ۲۵۶ پالس یا ۸ بیت در هر گردش هستند .
هنگامی که دیسک به گردش درمی آید اشعه مادون قرمزی که از LED ساطع میشود؛ از شیار عبور کرده و به فوتوترانزیستور برخورد میکند. البته گاهی اوقات نیز شیار مقابل فتوترانزیستور قرار نمی گیرد و اشعه مادون قرمز به طور کامل بلاک میشود .بنابراین فتو ترانزیستور به طور پیوسته خاموش و روشن میشود مقاومت R1 جریان LED را تعیین میکند و مقاومت Pull_Up (R2) در مسیر ولتاژ تغذیه VCC قرار دارد و منبع تغذیه را به اینورتر اشمیت متصل کرده تا هنگامی که ترانزیستور خاموش است در خروجی یک سیگنال سطح پایین تولید شود هنگامی که دیسک به چرخش درمی آید اشعه ی مادون قرمزی که از LED ساتع میشود با فتوترانزیستور برخورد میکند و ترمینال کلکتور امیتر به زمین متصل میشود در نتیجه منطق ورودی اینورتر اشمیت صفر میشود که باعث میگردد سطح خروجی بالا برود .
اگر خروجی اینورتر به یک کانتر یا انکدر دیجیتال متصل شود میتوان موقعیت محورها را تشخیص داد یا تعداد گردش محورها را بر حسب زمان (rpm) (rotations per minute) به دست آورد .
علاوه بر استفاده از المانهای دارای اسلات نوری میتوان از سنسور نوری بازتابشی (Reflective Optical Sensor) نیز به عنوان رابط ورودی استفاده نمود این سنسور برای تشخیص اشیا از یک LED و یک المان نوری استفاده میکند سوییچ نوری بازتابی میتواند حضور یا نبود یک شی را از طریق بازتابش تشخیص دهد ساختار پایه یک سنسور نوری بازتابشی در زیر آورده شده :
سوییچ نوری بازتابشی
فتوترانزیستور دارای مقاومت بالایی در حالت خاموش است و اگر نور به میزان کافی وجود داشته باشد روشن میشود و میزان مقاومت کاهش مییابد هنگامی که هیچ شئی در رو به روی سنسور قرار نداشته باشد نور LED بدون هیچ مانعی مستقیم حرکت میکند .
اما هنگامی که یک شی در نزدیکی سنسور قرار داشته باشد نور LED بازتاب پیدا میکند و توسط فتوترانزیستور تشخیص داده میشود میزان نور بازتابش شده که توسط ترانزیستور احساس میشود و میزان اشباع ترانزیستور بستگی به این دارد که میزان بازتابش نور از شی به چه میزان باشد و اینکه شی چقدر از LED فاصله داشته باشد.
انواع دیگری از المان های نوری
علاوه بر استفاده از سوییچهای نوری شیاردار یا بازتابشی به عنوان رابط ورودی میتوان از دیگر انواع دتکتورهای نور نیمه رسانا همانند فتو دیودهای پیوندی و سلولهای خورشیدی نیز بهره جست تمام این المانهای حساس به نور میتوانند در زیر نور خورشید یا در نور اتاق فعال شوند و به عنوان رابط ورودی مورد استفاده قرار بگیرند .
قسمت پیوند PN دیودهای سیگنال و قدرت با بدنهای پلاستیکی پوشانده شده تا با برخورد فوتونها به دیود دچار تغییر و نوسان نشوند هنگامی که یک دیود بایاس معکوس میشود عبور جریان متوقف خواهد شد و مانند یک کلید در حالت مدار باز عمل میکند به هر حال اگر ما بتوانیم روکش پلاستیکی را برداریم و نور به پیوند PN بتابانیم فوتونهای نور باعث رسانا شدن پیوند PN در حالت بایاس معکوس میشود و جریان متناسب با شدت نور از پیوند عبور میکند .
بر خلاف ترانزیستورهای قدرت و سیگنال روکش فتودیودها شفاف است تا اجازه دهد نور به پیوند PN بتابد فتودیودها فوقالعاده نسبت به نور حساس هستند و نوع و فرایند دوپینگ نیمه رسانا فرکانس پاسخ ( نور مرئی یا اشعه مادون قرمز ) را مشخص میکند .
هنگامی که هیچ نوری به پیوند PN نمی تابد جریان نشتی معکوس فوقالعاده کمی از دوید عبور میکند که قابل اغماض است اما اگر میزان نور افزایش یابد جریان نشتی معکوس نیز افزایش پیدا میکند اینگونه دیودهای نور کاربردهای خیلی زیادی دارند و سرعت پاسخ بالای آنها ، آنها را تبدیل به گزینه مناسبی برای دتکتورهای نور پرسرعت کرده .
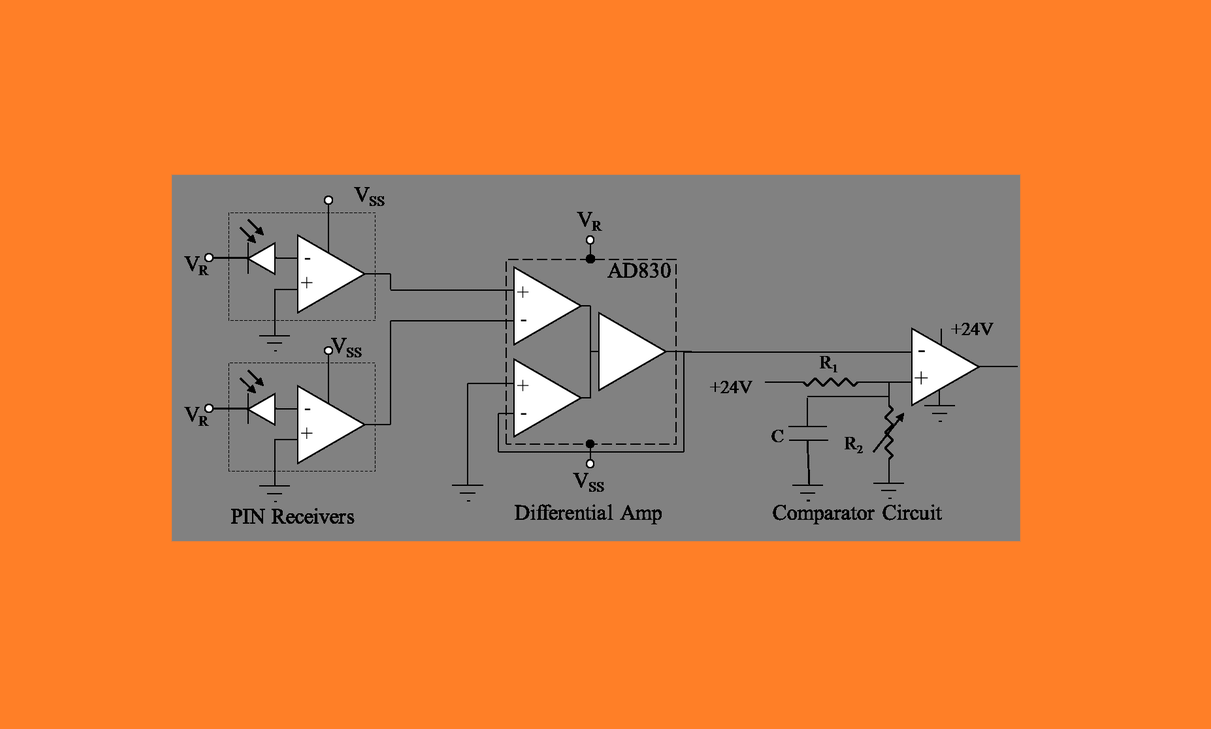
استفاده از فتودیودها به عنوان رابط نوری
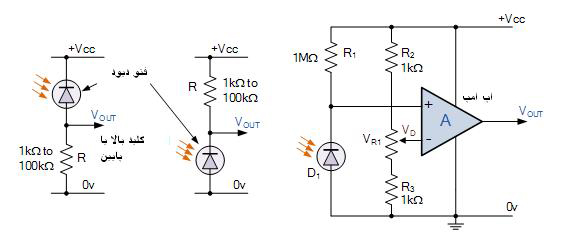
در ۲ مداری که در سمت چپ وجود دارند ، فتودیودها بایاس معکوس شدهاند و ولتاژ خروجی از مقاومت سری گرفته میشود این مقاومت میتواند به صورت ثابت باشد یا میتوان یک پتانسیومتر ۱۰۰KΩ را جایگزین آن نمود این مقاومت میتواند بین فتودیودو زمین یا بین فتودیود و ولتاژ تغذیه VCC متصل شود .
فتودیود BPX48 پاسخ فوقالعاده سریعی به تغییرات شدت نور دارد اما نسبت به LDR های کادمیوم سولفید حساسیت کمتری نسبت به میزان تغییر نور دارد بنابراین برای تقویت سیگنال به یک آپ امپ یا ترانزیستور نیاز خواهد بود .
یک فتودیود میتواند به عنوان یک Hلمان مقاومت متغیر که توسط میزان نوری که به پیوندش تابانده شده کنترل میشود نیز به کار رود سرعت پاسخ دهی فتودیودها خیلی بالا ( در برخی مواقع در حد چند نانو ثانیه ) میباشد بنابراین از آنها در انکدرهای نوری و ارتباطات فیبر نوری استفاده میشود .
علاوه بر Hلمانهای نوری پیوند PN مانند فتودیودها و فتوترانزیستورها انواع دیگری از دتکتورهای نوری نیمه رسانا وجود دارد که بدون پیوند PN عمل می کند و خواص مقاومتی شان با میزان شدت نور تغییر میکند این المانها LDR نام دارند. LDR ها یا فتوسلهای کادمیوم سولفید المانهایی پسیو هستند که مقاومت شان بسته به شدت نور تغییر میکند هنگامی که هیچ نوری به LDR نمی تابد مقاومت ورودی آنها خیلی بالا ( در حد چند مگا اهم ) میباشد اما هنگامی که در معرض نور شدید خورشید قرار بگیرند مقاومت شان به زیر ۱KΩ کاهش مییابد .
LEDها عملکردی شبیه به پتانسیومترها دارند با این تفاوت که شدت نور میزان مقاومتشان را کنترل میکند .
فتوریزیستورهای LED به عنوان رابط ورودی
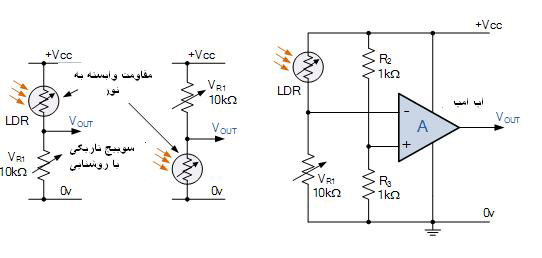
غالباً LDR ها با یک مقاومت سری میشوند و سپس به منبع تغذیه متصل میگردند تا یک شبکهی جداکننده ولتاژ به وجود بیاید در تاریکی مقاومت LDRها خیلی بیشتر از مقاومت معمولی است بنابراین توسط اتصال LDR از منبع به مقاومت یا از مقاومت به زمین میتوان از آن به عنوان یک دتکتور نور یا دتکتور تاریکی استفاده نمود .
از آن جایی که LDR هایی مانند NORP12 خروجی متغیر ولتاژ وابسته به مقدار مقاومتی شان تولید میکنند ، میتوانند به عنوان مدارات رابط ورودی آنالوگ مورد استفاده قرار بگیرند علاوه بر این LDR ها میتوانند به گونهای به یکدیگر متصل شوند که یک پل وتستون را به وجود بیاورند یا ولتاژ مقایسه کننده آپ امپ را تأمین کنند یا به عنوان مدار راهانداز اشمیت یک سیگنال دیجیتال را برای مدارات دیجیتال یا میکروکنترلرها تأمین کنند .
دتکتورهایی که برای تشخیص سطح نور ، دما یا فشار به کار میروند میتوانند برای تولید خروجیهای TTL برای مدارات منطقی به کار روند دتکتورهای آستانهی دما و نور که به یک اپامپ مقایسهکننده متصل شدهاند میتوانند در صورت تجاوز مقدار اندازهگیری شده از مقدار مورد نظر سیگنال منطقی یک یا صفر را تولید کنند.
خلاصهی رابطهای ورودی
همانطور که در این مقاله دیدیم سنسورهای متعددی وجود دارند که از آنها میتوان برای تبدیل یک یا چند خصیصه فیزیکی به یک سیگنال الکتریکی بهره برد و این سیگنال الکتریکی را در مدارات دیجیتال یا میکروکنترلر مورد استفاده قرار داد .
مشکل این جاست که تمام خصیصههای فیزیکی که اندازه گرفته شدهاند نمیتوانند به طور مستقیم به مدار تقویت کننده یا پردازشگر متصل شوند بنابراین یک مدار باید به عنوان رابط در ورودی قرار گیرد تا ولتاژ و جریان های ورودی آنالوگ را تبدیل به مقادیری قابل فهم برای مدارهای دیجیتال کند .
امروزه با استفاده از رابطهای ورودی متنوع میتوان PC ها، میکروکنترلر ها و دیگر سیستمهایی که دارای میکروپروسسور هستند را به مدارات آنالوگ یا قدرت اتصال داد. در برخی مواقع پورتهای ورودی ـ خروجی روی دستگاههای دیجیتال تعبیه شده و یک رابط ورودی یا خروجی در دستگاه مجتمع شده که از آن میتوان برای انتقال اطلاعات استفاده نمود.
ما مشاهده کردیم که سنسورها المانهای الکتریکی هستند که میتوانند یک خصیصه را به یک سیگنال تبدیل کنند، بنابراین از آن ها به عنوان المانهای ورودی استفاده میشود. این سنسورها میتوانند قابلیتهای مدارات الکترونیکی را افزایش دهند و اطلاعاتی را از محیط بیرونی دریافت و به مدارات دیجیتال و دارای میکروکنترلر انتقال دهند. اما ذکر این نکته خالی از لطف نیست که سنسورها برای برقراری ارتباط با مدارات دیجیتال نیاز به یک رابط ورودی دارند. این رابط متغیرهای فیزیکی را تبدیل به سیگنالهای الکتریکی قابل فهم برای مدارات دیجیتال میکند و زمینه پردازش آن را فراهم میکند.



