در این مقاله گروهی از قطعات مورد بررسی قرار میگیرد که به عنوان قطعات ورودی با ماهیت سنجش موقعیت طبقهبندی میشوند و به همین دلیل «سنسور موقعیت» نامیده میشوند
همانطور که از نام آن پیداست سنسورهای موقعیت، موقعیت یک شیء را تشخیص میدهند. موقعیت خود سنسور در برخی مواقع به عنوان مرجع در نظر گرفته میشود یا نقطهای به عنوان نقطه ی مرجع انتخاب میگردد گروهی از سنسورها وجود دارند که میتوانند فیدبک مکانی داشته باشند .
یک متد برای تعیین موقعیت، تخمین فاصله است، حال این فاصله میتواند فاصله بین دو نقطه باشد یا میزان چرخش یک شی به دور خودش ( به عنوان مثال چرخش چرخهای یک ربات و ارزیابی اینکه چرخ ها به چه میزان روی زمین جابه جا شدهاند ). در هر صورت سنسورهای موقعیت میتوانند میزان جابه جایی یک شی را تشخیص دهند و به دو گروه سنسورهای حرکت خطی و سنسورهای حرکت دوار طبقهبندی میشوند .
پتانسیومتر
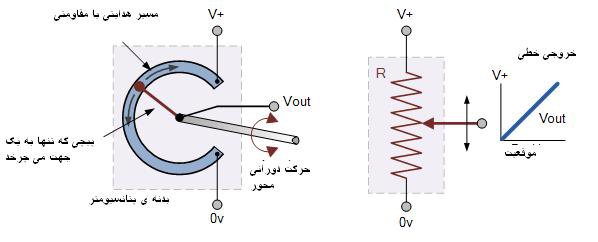
پر کاربردترین سنسور موقعیت، پتانسیومتر میباشد. این سنسور ارزان است و شیوهی استفاده از آن خیلی راحت است. در این سنسور یک پیچ به یک محور متصل شده که یا حرکت دورانی دارد و یا رو به جلو و عقب حرکت میکند. حرکت محور به نوبه خود باعث میشود مقاومت بین پیچ و محور تغییر کند و یک سیگنال خروجی که مقدارش با رابطهی بین موقعیت پیچ در داخل محور و مقاومت المان تناسب دارد تولید شود. به عبارتی دیگر مقدار مقاومت پتانسیومتر بستگی به موقعیت پیچ و محور آن نسبت به یکدیگر دارد.
1. پتانسیومتر
پتانسیومتردر طراحیها و سایزهای مختلفی وجود دارد. هنگامی که از پتانسیومتر به عنوان یک سنسور موقعیت استفاده میشود؛ جسمی که قرار است موقعیتش تعیین شود به طور مستقیم به محور پتانسیومتر متصل میشود .
یک ولتاژ DC مرجع به دو سر اتصال ثابت المان مقاومتی اعمال میشود و ولتاژ خروجی از ترمینال پیچ گرفته میشود این پیکربندی یک اختلاف پتانسیل یا یک مدار جدا کننده ی ولتاژ را به وجود میآورد و مقدار ولتاژ خروجی با موقعیت محور رابطه دارد به عنوان مثال ، اگر اختلاف پتانسیل ۱۰ ولت را به دو سرالمان مقاومتی اعمال کنید ، ماکزیمم ولتاژ خروجی برابر با ولتاژ تغذیه خواهد بود ( یعنی ۱۰ ولت ) و مینیمم ولتاژ صفر خواهد بود در چنین شرایطی تغییر موقعیت پیچ نسبت به محور باعث خواهد شد که ولتاژ بین ۰ تا ۱۰ ولت تغییر کند اگر ۵ ولت در خروجی داشته باشیم ، نشانگر این است که پیچ درست در مرکز محور قرار گرفته است.
ساختار پتانسیومتر
2. ساختار پتانسیومتر
سیگنال خروجی (VOUT) از مرکز اتصال پیچ گرفته میشود و وابسته به درجه گردش پیچ نسبت به محور است .
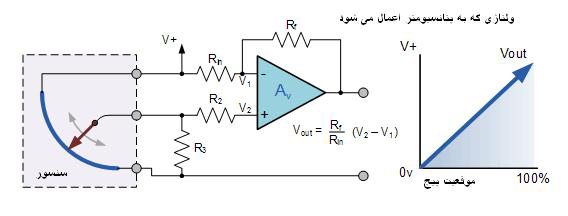
یک مدار ساده برای تعیین موقعیت
3. مثالی از یک مدار ساده که برای تعیین موقعیت طراحی شده است
با وجود اینکه استفاده از پتانسیومترها به عنوان سنسور موقعیت مزایای زیادی دارد ( مانند : کم هزینه بودن ، سادگی ، کاربرد راحت و …) مضراتی نیز دارد از جمله :
به دلیل اصطکاک مداوم قطعات ،خوردگی و پوسیدگی المان اجتنابناپذیر است ، دارای دقت پایین میباشد ، پاسخ فرکانسی محدودی دارد و در شرایط یکسان ممکن است نتایج یکسانی به دست نیاید.
مهمترین نقطه ضعف پتانسویمتر ها به عنوان سنسور موقعیت این است که بازه ی حرکت پیچ یا قسمت متحرک و متعاقباً دامنه ی سیگنال خروجی محدود به اندازه ی پتانسیومتری میشود که مورد استفاده قرار می گیرد.
به عنوان مثال یک پیچ میتواند بین ۰ تا ۳۳۰ درجه نسبت به محور گردش داشته باشد به هر حال پتانسیومترهایی نیز وجود دارند که دارای چندین پیچ هستند و موقعیت پیچ ها نسبت به یکدیگر نیز حالتهای بی شماری را به وجود می آورد.
در اکثر پتانسیومترها از ورق های کربنی برای ایجاد مسیر مقاومتی استفاده شده اما ورق های کربنی باعث ایجاد نویز میشوند و همچنین عمر کوتاهی دارند و به سرعت دچار فرسودگی میشوند.
به علاوه مسیرهای مقاومتی سیم پیچ نیز وجود دارند که به آنها رئواستات(Rheostats) گفته میشود اما بدبختانه پتانسیومترهایی که از این طراحی برای مسیر مقاومتی شان استفاده میکنند دارای خروجی هایی لگاریتمی هستند چرا که پیچ به طور ناگهانی از بخشی از سیم به بخش دیگر میپرد و در نتیجه سیگنال خروجی دچار خطاهای زیادی میشود .
برای بالا بردن دقت و کاهش نویز از انواع مخصوصی از ورق های پلیمری استفاده میشود مسیرهای مقاومتی که با ورق های پلیمری ساخته میشوند اصطکاک کمی دارند و خروجی آنها تقریباً خطی است از موارد کاربرد این نوع پتانسیومترها دسته های بازی کامپیوتری و چرخ های کنترلی میباشد .
سنسورهای موقعیت القایی
ترانسفورماتورهای متغیر خطی تفاضلی
یکی از انواع سنسورهای موقعیت که دچار مشکلات اصطکاک و فرسودگی نیست؛ ترانسفورماتور متغیر خطی تفاضلی یا LVDT (Linear Variable Differential Transformer) میباشد این نوع سنسور موقعیت یک سنسور القایی میباشد و بر اساس قواعدی که بر ترانسفورماتور AC حاکم است عمل میکند این نوع سنسورها برای اندازهگیری جابه جایی خطی فوقالعاده دقیق هستند و میزان خروجی شان با موقعیت هسته متحرک شان کاملاً متناسب است.
این نوع سنسورها غالباً از ۳ سیمپیچ که به دور یک لولهی خالی پیچیده شدهاند تشکیل شده. یک سیم پیچ، سیم پیچ اولیه نامیده میشود و دو سیم پیچ دیگر بخش ثانویه مشابهی را ایجاد میکنند که به لحاظ الکتریکی به یکدیگر به صورت سری متصل هستند اما با هم ۱۸۰ درجه اختلاف فاز دارند.
در این طراحی یک هستهی فرومغناطیس آهنی ( که گاهی اوقات به آن آرماتور گفته میشود ) به شئی که قرار است موقعیت آن تشخیص داده شود متصل میشود این هسته درون بخش لوله ای LVDT در دو جهت بالا و پایین حرکت میکند.
یک ولتاژ مرجع AC که سیگنال تحریک نامیده میشود ( سیگنال تحریک بین ۲ـ۲۰ ولت و فرکانس آن بین ۲ ـ۲۰ Khz است ) به سیم پیچ اولیه اعمال میشود و سیم پیچ اولیه نیرو محرکه القایی را درون دو سیم پیچ دیگر به وجود میآورد .
اگر هستهی آهنی درست در مرکز لوله باشد ( موقعیت صفر ) نیرو محرکهی القایی در دو سیم پیچ ثانویه یکدیگر را خنثی میکنند چرا که با یکدیگر ۱۸۰ درجه اختلاف فاز دارند بنابراین ولتاژ خروجی نیز صفر خواهد بود هنگامی که هسته جابهجا میشود ولتاژ القایی در یکی از سیم پیچ ها از دیگری بزرگتر خواهد بود و ولتاژ خروجی تولید خواهد شد .
پلاریته سیگنال خروجی بستگی به جهت و میزان جابه جایی هسته ی متحرک دارد هر چقدر هسته از موقعیت صفر دورتر شود سیگنال خروجی بزرگتر خواهد بود خروجی حاصل تفاضل ولتاژ القایی در دو سیم پیچ ثانویه است که به صورت خطی با موقعیت هسته تغییر میکند بنابراین سیگنال خروجی این نوع سنسور دارای دامنه ای که بیانگر میزان جابه جایی شی و دارای پلاریته که بیانگر جهت جابهجایی شی میباشد است فاز سیگنال خروجی میتواند با فاز سیگنال محرک مورد مقایسه قرار بگیرد و به این ترتیب متوجه خواهیم شد که شی در چه جهتی حرکت میکند.
ترانسفورماتور متغیر تفاضلی خطی
4. ترانسفورماتور متغیر تفاضلی خطی
هنگامی که آرماتور از یک سر به سمت مرکز حرکت میکند ولتاژ از ۰ تا ماکزیمم تغییر میکند و اگر آرماتور از مرکز لوله عبور کند تغییر فاز رخ میدهد، به عبارتی دیگر اندازه ولتاژ خروجی میزان جابهجایی را تعیین میکند و فاز سیگنال خروجی نشانگر جهت حرکت هسته میباشد .
کاربرد اصلی سنسور LVDT به عنوان مبدل فشار میباشد. فشار به یک دیافراگم نیرویی را ایجاد میکند که میتواند توسط LVDT تبدیل به یک سیگنال قابل خواندن برای دستگاه شود .
مزایای LVDT نسبت به پتانسیومتر معمولی این است که ورودی بسته به خروجی خطی است ، دقت بالایی دارد و اصطکاک فوقالعاده کم آن عمر دستگاه را بالا میبرد.
سنسورهای مجاورت القایی
یکی دیگر از سنسورهای موقعیت القایی پرکاربرد سنسور مجاورت القایی میباشد که به سنسور جریان ادی (Eddy Current Sensor) نیز معروف است. در حقیقت این سنسورها میزان جابه جایی یا گردش را اندازهگیری نمیکنند؛ بلکه بیشتر برای تشخیص اینکه یک شی در مجاور آن واقع شده یا نه مورد استفاده قرار میگیرند.
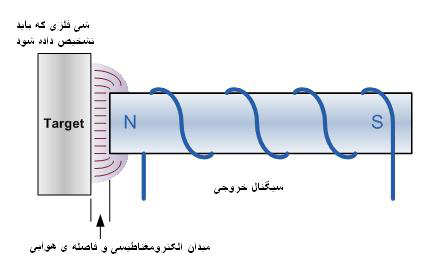
سنسورهای مجاورت نیازی به تماس فیزیکی با شی ندارند و از یک میدان مغناطیسی برای تشخیص استفاده میکنند در سنسورهای القایی یک سیم پیچ دور یک هستهی آهنی پیچیده شده که با اعمال میدان الکترومغناطیسی به آن حلقهی القایی به وجود میآید.
هنگامی که یک جسم فرومغناطیس در میدان جریان ادی قرار میگیرد که در اطراف سنسور القایی ایجاد شده اندوکتانس سیمپیچ تغییرات چشمگیری پیدا میکند. سنسورهای مجاورت این تغییر را احساس و متناسب با آن یک ولتاژ خروجی تولید میکنند. بنابراین سنسورهای مجاورت القایی بر اساس قواعد اندوکتانس فارادی (Faraday’s Law Of Induction) عمل میکنند .
سنسورهای مجاورت القایی
5. سنسورهای مجاورت القایی
یک سنسور مجاورت القایی از ۴ قسمت اصلی تشکیل شده :
(۱) یک نوسان ساز که میدان الکترومغناطیسی را ایجاد میکند .
(۲) یک سیم پیچ که میدان مغناطیسی تولید میکند .
(۳) یک مدار تشخیص که تغییرات میدان مغناطیسی در زمانی که یک شی وارد آن میشود را احساس میکند .
(۴) یک مدار خروجی که سیگنال خروجی را تولید میکند که دارای پایههای پیشفرض باز و پیشفرض بسته است .
سنسورهای مجاورت القایی تشخیص اجزای فلزی را بدون تماس فیزیکی با آن میسر میکنند. این حالت، اینگونه سنسورها را برای استفاده در محیطهای کثیف یا خیس مناسب میکند. یکی از نقاط ضعف اینگونه سنسورها این است که دامنهی تشخیصشان فوقالعاده پایین است و از ۱۲ میلیمتر تجاوز نمیکند .
6. سنسورهای مجاورت القایی
علاوه بر کاربردهای صنعتی، از سنسورهای القایی مجاورت برای کنترل ترافیک استفاده میشود. این سنسورها در چراغ راهنمایی که در چهارراهها قرار دارند؛ تعبیه میشود و میتواند رنگ چراغ را بسته به ترافیک موجود عوض کند. حلقههای القایی مستطیلی میتوانند در سطح جادهها نصب شوند و به روشهای مختلف اطلاعاتی را به چراغ راهنما ارسال کنند .
هنگامی که یک وسیله ی نقلیه از روی حلقهی القایی عبور میکند بخش فلزی وسیلهی نقلیه اندوکتانس حلقهی القایی را تغییر میدهد و سنسور فعال میشود که متعاقباً یک سیگنال به کنترلر چراغ راهنمایی ارسال میشود و متوجه خواهد شد که یک وسیلهی نقلیه روی حلقهی القایی و در نتیجه پشت چراغ ایستاده است.
یکی از اصلیترین نقاط ضعف این سنسورها این است که نمیتوانند جهت را تشخیص دهند و در تمام جهات یکسان عمل میکنند. در ضمن آنها از تشخیص اشیای غیر فلزی عاجزند. یکی دیگر از سنسورهای مغناطیسی موقعیت، سنسور اثر هال میباشد .
انکودرهای دوار
انکودرهای دوار یکی دیگر از انواع سنسورهای موقعیت هستند که تا حدودی شبیه به پتانسیومترها هستند که در بالا به آن پرداخته شد. اما انکودرهای دوار از سنسورهای غیر تماسی اپتیکال هستند که حرکت در جا را تشخیص میدهند و آن را تبدیل به یک کد دیجیتال یا آنالوگ میکنند. به عبارتی دیگر، آنها حرکات مکانیکی را به سیگنال الکتریکی ( ترجیحاً دیجیتال ) تبدیل میکنند .
تمام انکودرهای نوری بر اساس یک اصل کار میکنند: نور از یک LED یا یک منبع مادون قرمز از یک دیسک رمزگذاری شده عبور میکند. این دیسک شامل کدهای مختلف میباشد که غالباً به صورت باینری یا BCD است. دتکتورهای نوری دیسک را در حالت گردش اسکن میکنند و یک مدار الکترونیکی اطلاعات را به حالت دیجیتال درمی آورد که متعاقباً آنها نیز به صورت پالس هایی به کانترها و کنترلرها ارسال میشود که به نوبهی خود میزان حرکت محور دوار را محاسبه میکنند.
انکودرهای دوار اپتیکال به دو نوع اصلی تقسیم میشوند : انکودرهای افزایشی و مطلق
انکودر افزایشی
7. انکودر افزایشی
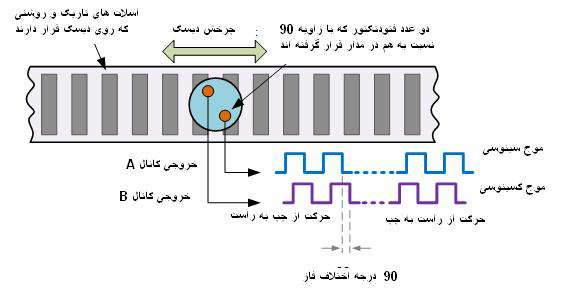
انکودرهای افزایشی یا انکودرهای دوار نسبی یکی از سادهترین انواع سنسورهای دو موقعیتی هستند. خروجی این نوع سنسورها یک سری پالس مربعی است که توسط گروهی از فتوسلها ساخته میشود. فتوسل قسمتهای سیاه و شفاف روی سطح دیسک دوار که مقابل یک منبع نور قرار دارد را تشخیص میدهد. انکودر رشتهای از پالسهای موج مربعی را به وجود می آرود که نشانگر حرکت محور دوار است .
انکودرهای افزایشی دو خروجی مجزا دارند که با یکدیگر ۹۰ درجه اختلاف فاز دارند و جهت چرخش محور ترتیب خروجی را مشخص میکند.
تعداد اسلات ها یا بخشهای شفاف و تیره ی دیسک دقت دستگاه را تعیین میکند به عبارتی دیگر هر چقدر تعداد اسلات های روی دیسک بیشتر باشد دقت اندازهگیری نیز بیشتر است دیسک های انکد شده ی مرسوم معمولاً دارای دقت اندازهگیری ۸ بیت بر چرخش محور هستند .
سادهترین نوع انکدر افزایشی، سرعت سنج (تاکومتر tachometer ) میباشد این سنسور یک خروجی با پالس مربعی تولید میکند و معمولاً در سیستمهای تک جهته که تنها موقعیت پایه یا اطلاعات مربوط به سرعت نیاز است مورد استفاده قرار میگیرد.
البته استفاده از انکدر موج سینوسی مرسومتر میباشد این نوع انکدر ۲ خروجی به نام کانال A و کانال B دارد و از ۲ فتودتکتور استفاده میکند که با یکدیگر ۹۰ درجه اختلاف فاز دارند و بنابراین دو موج مجزا سینوسی و کوسینوسی تولید میکنند .
یک انکدر افزایشی ساده
8. یک انکدر افزایشی ساده
با استفاده از عملگر تانژانت معکوس زوایه محور به رادیان به دست میآید. به طور کلی دیسک اپتیکالی که در انکودرهای دوار مورد استفاده قرار میگیرد، حالت دایرهای دارد و دقت خروجی به صورت 360/θ=n محاسبه میشود؛ که در اینجا n مساوی با تعداد قسمتهایی است که روی دیسک وجود دارد .
به عنوان مثال ، تعداد قسمتهایی که برای رسیدن یک انکودر به دقت یک درجه نیاز است به صورت زیر محاسبه میشود.
360/1` = n
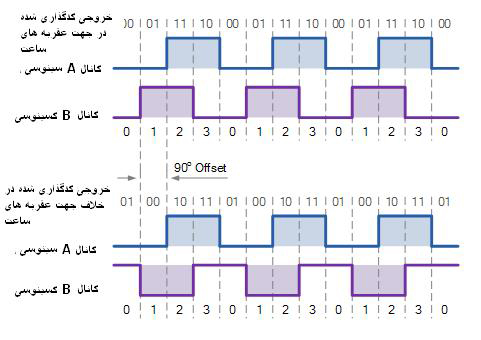
در نتیجه n=360 میشود. یعنی روی دیسک باید ۳۶۰ اسلات تعبیه شود. در ضمن اینکه کدام کانال ابتدا خروجی میدهد جهت چرخش دیسک را مشخص میکند.
خروجی انکودر افزایشی
9. خروجی انکدر افزایشی
یکی از مهمترین نقاط ضعف انکدرهای افزایشی به عنوان یک سنسور موقعیت این است که آنها به کانترهای خارجی نیاز دارند تا قادر باشند زاویه گردش مطلق محور را به دست بیاورند. اگر منبع تغذیه به صورت موقت خاموش شود یا انکودر یک پالس را به دلیل نویز یا کثیف بودن دیسک از دست دهد سیستم دچار خطا میشود. یک راه برای فائق شدن بر این مشکل این است که از انک.درهای موقعیت مطلق استفاده شود.
انکودرهای موقعیت مطلق
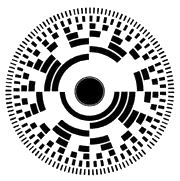
انکودرهای موقعیت مطلق پیچیدهتر از انکودرهای نسبی هستند. آنها برای هر گردش یک کد خروجی منحصر به فرد تولید میکنند که نشانگر میزان جابه جایی و گردش میباشد .
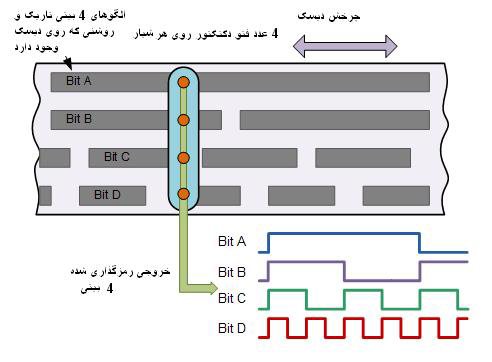
دیسک رمزگذاری شدهی آنها شامل چند قسمت تاریک و روشن است. هر قسمت دارای فتودتکتور منحصر به فرد خودش میباشد که میتواند به طور همزمان یک مقدار موقعیت را برای هر حرکت بخواند. تعداد شیارهای روی دیسک متناسب با دقت بیتی انکودر است؛ بنابراین یک انکدر مطلق ۱۲ بیتی ، ۱۲ شیار دارد .
یک دیسک انکد شدهی باینری ۴ بیتی
10. یک دیسک انکد شده ی باینری ۴ بیتی
بزرگترین مزیت یک انکودر مطلق این است که حافظهاش به سرعت پاک نخواهد شد. بنابراین اگر منبع تغذیه قطع شود، موقعیت انکودر حفظ میشود. اکثر انکودرهای دوار تک جهته هستند اما انکودرهای مطلق که در چند جهت گردش دارند نیز وجود دارند که با افزایش دیسکهای انکد شده ، فیدبک تغییرات پی در پی را پشتیبانی میکنند.
مهمترین مورد استفادهی انکدرهای موقعیت مطلق هارد دیسکهای کامپیوتر و CD/DVD درایوها میباشد که موقعیت هد دستگاه را تعیین میکنند. همچنین در پرینترها برای تعیین موقعیت هد چاپگر بر روی کاغذ از انکودرهای مطلق استفاده میشود .
در این مقاله انواع سنسورهایی که برای تعیین موقعیت یک شیء به کار میروند شرح داده شد. در مقاله ی بعدی به سنسورهای دما مانند ترمیستور ، ترموستات و ترموکوپل میپردازیم که میزان تغییرات دما را اندازهگیری میکنند.