موتور استپر یا استپ موتور یک نوع موتور DC بدون جاروبک است که یک دور چرخش را در قالب تعدادی چرخش با زاویهی مشخص انجام میدهد. به عنوان مثال یک دور چرخش را با 100 چرخش 3.6 درجهای کامل میکند. به هر یک از این چرخشها اصطلاحا گام یا استپ گفته میشود.
با اعمال هر پالس به موتور (در ادامه به صورت مفصل و دقیقتر منظور از پالس مشخص میشود) موتور به اندازهی یک استپ دوران میکند. بنابراین از این موتور میتوان برای تنظیم موقعیت زاویهای شفت موتور استفاده کرد. دقت شود که کنترل موقعیت استپر موتور از نوع حلقه باز است و فیدبکی از موقعیت گرفته نمیشود. کنترل سرعت زاویهای با این موتور نیز به سادگی انجام میشود، زیرا نرخ اعمال پالسها متناظر با سرعت زاویهای موتور است. از معایب استپر موتورها این است که در صورت اعمال پالسها با نرخ بالا به موتور امکان از دست دادن یا در اصطلاح گم شدن استپها وجود دارد. به این صورت که پالسی جهت تغییر استپ اعمال شده است اما شفت موتور نچرخیده. بنابراین به دلیل عدم وجود فیدبک، در سرعت چرخش بالا امکان کنترل دقیق موقعیت یا سرعت زاویهای وجود ندارد.
در استپ موتورها مشابه با موتورهای AC و براشلس، سیمپیچها استاتور (قسمت ثابت) هستند و روتور (قسمت دوار) میلهای از جنس آهنربای دائم یا مادهای فرومغناطیس است. در مقابل این وجه شباهت با موتورهای AC در استپ موتورها خلاف موتورهای AC که تحریک سینوسی و پیوستهای به سیمپیچها اعمال میشود، میدان مغناطیسی به صورت گسسته و با تغییر استپ عوض میشود.
فاز و قطب
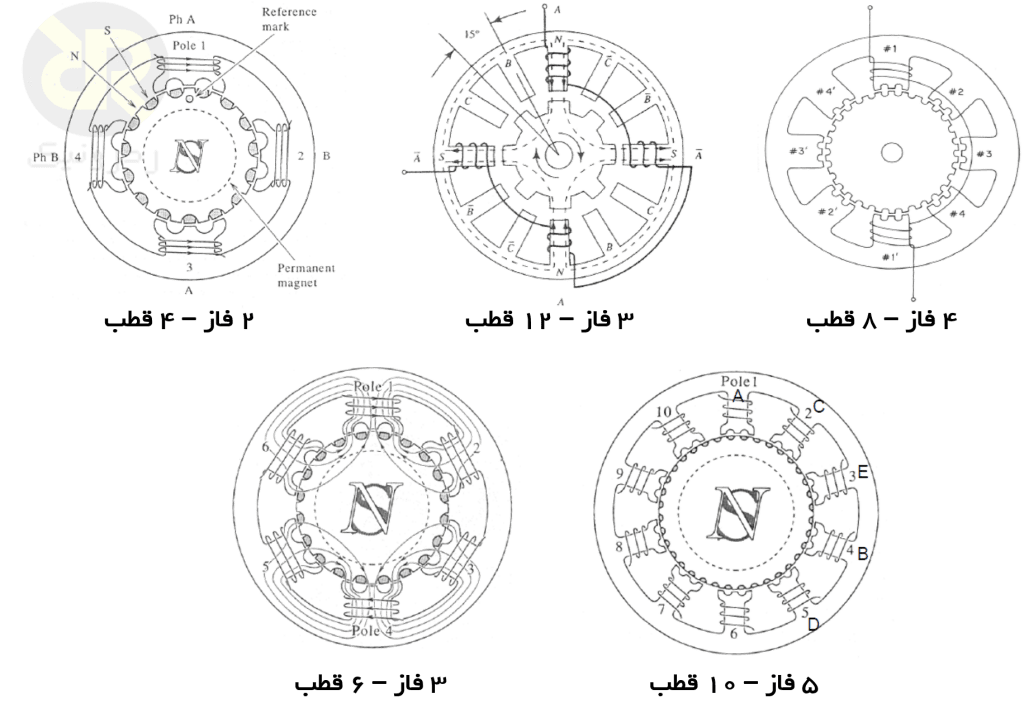
قسمت ثابت موتورهای استپر (استاتور) که شامل سیمپیچها میباشد از تعدادی فاز و قطب تشکیل شده است. به هر یک از سیمپیچهای موجود در استاتور یک قطب (Pole) گفته میشود. هر جفت قطب روبروی هم در استاتور که سیمپیچهای آنها به صورت موازی یا سری به هم متصل هستند یک فاز را تشکیل میدهند (در بعضی موارد هر فاز از چهار قطب روبروی هم تشکیل میشود). موتورهای استپر معمولا بین 4 تا 12 قطب دارند و به صورت 2، 3، 4 و 5 فازی وجود دارند. در شکل زیر تعدادی نمونه از ساختار داخلی روتور و استاتور استپر را مشاهده میکنید.
تعداد فاز و قطبهای چند نمونه موتور استپر
دو سیمی و تک سیمی بودن قطبها
در استپر موتورها دو نوع متفاوت از نحوهی سیمپیچی وجود دارد. قطبها یا به صورت تک سیم (Monofilar) یا دو سیم (Bifilar) ساخته میشوند. در حالتیکه قطب به صورت تک سیم باشد، به منظور تغییر جهت میدان مغناطیسی تولید شده باید جهت جریان عبوری از سیمپیچ را تغییر داد. اما در حالت دو سیم، هر قطب از دو سیم پیچ که جهت چرخش آنها مخالف یکدیگر است تشکیل شده که این دو سیم از یک طرف مشترک هستند. از طرف دیگر سیمپیچها با استفاده از یک سوئیچ تعیین میشود که کدام سیمپیچ جریان را از خود عبور دهد. بنابراین با استفاده از یک سوئیچ میتوان جریان عبوری از هر قطب را تعیین کرد. در حالت دو سیم با توجه به اینکه تعداد حلقههای سیمپیچ کاهش مییابد گشتاور کمتری توسط موتور تولید میشود.
موضوع تغییر جهت جریان عبوری برای تغییر جهت میدان مغناطیسی در موتورهایی که روتور آنها از نوع آهنربای دائم است مسئلهی مهم و قابل توجهیست که در ادامه علت این اهمیت مشخص میشود.
موتورهایی که سیمپیچ آنها به صورت Monofilar طراحی شده است باید با مدارهای Bipolar به منظور تغییر جهت جریان عبور راهاندازی شوند و موتورهایی که سیمپیچ Bifilar دارند باید از مدارهای Unipolar استفاده کنند.
موتور استپر رلوکتانس متغیر ساده
قسمت روتور در موتورهای رلوکتانس متغیر از جنس مواد فرومغناطیس است. این مواد در حضور میدان مغناطیسی به گونهای تغییر جهت میدهند که بیشترین شار مغناطیسی از آنها عبور کند. در ادامه نحوه حرکت روتور بر اساس چگونگی تحریک شدن فازهای استاتور در موتورهای رلوکتانس متغیر توضیح داده میشود.
راهاندازی به روش Wave Drive
در تصویر زیر یک موتور رلوکتانس متغیر با 8 قطب و 4 فاز نشان داده شده که تعداد دندانههای استاتور آن 6 عدد است. قطبهای هر فاز در حالت تحریک با رنگ قرمز و در حالتی که جریانی از آن عبور نمیکند با رنگ زرد نشان داده شده است. همانطور که مشاهده میشود با فعال شدن هر فاز، روتور به گونهای حرکت میکند که نزدیکترین دندانه به فاز فعال شده درست روبروی آن فاز قرار گیرد تا بیشترین شار مغناطیسی از مجموعه عبور کند. بنابراین با فعال شدن فازها به ترتیب، روتور به صورت پیوسته چرخش میکند. استاتور نشان داده شده از 8 قطب تشکیل شده است، بنابراین زاویه بین هر دو قطب 45 درجه است. از تصویر پیداست که دندانهی روتور به ازای هر سه گام از موقعیت روبروی یک قطب به روبروی قطب همجوار منتقل میشود. بنابراین زاویه گام یا استپ در این موتور 15 درجه است.
نحوه راهاندازی استپ موتور با روش Wave Drive
راهاندازی به روش Full Step
در این نوع راهاندازی در هر لحظه دو فاز همجوار در حالت فعال قرار میگیرند. در چنین حالتی روتور به گونهای حرکت میکند که بیشترین شار مغناطیسی از مجموعه عبور کند. همانطور که در تصویر مشاهده میشود مقدار زاویهی گام در این حالت تفاوتی با روش Wave Drive ندارد اما نقطهی تعادل روتور به اندازهی نیم گام (در این مثال 7.5 درجه) نسبت به حالت Wave Drive تفاوت دارد. همچنین در این نوع راهاندازی موتور استپر مقدار گشتاور موتور و جریان مصرفی به مراتب بالاتر از حالت Wave Drive است (گشتاور موتور اندکی کمتر از دو برابر گشتاور در حالت Wave Drive است. اما جریان مصرفی دو برابر است).
نحوه راهاندازی استپ موتور با روش Full Step
راهاندازی به روش Half Step
در صورتی که ترتیب روشن و خاموش شدن فازهای موتور استپر بصورت یک در میان بین دو روش Wave Drive و Full Step انجام شود، به دلیل اینکه این دو روش به اندازهی نیم گام با هم اختلاف در نقاط تعادل دارند، زاویهی استپ یا گام نصف میشود. به این روش نیم گام یا Half Step گفته میشود. در تصویر زیر راهاندازی نیم گام موتور استپری که قبلا با دو روش قبلی نشان داده شده بود را مشاهده میکنید. لازم به ذکر است که گشتاور موتور در این حالت بین دو گشتاور حالت Wave Drive و Full Step تغییر میکند.
نحوه راهاندازی موتور استپر با روش Half Step
در هر یک از روشهای راهاندازی به شیوهی Wave Drive، Full Step و Half Step میتوان ولتاژ اعمالی به فاز را با سیگنال PWM توسط مدارهای درایور از جمله مدار H-Bridge اعمال نمود.
راهاندازی به روش Micro Stepping
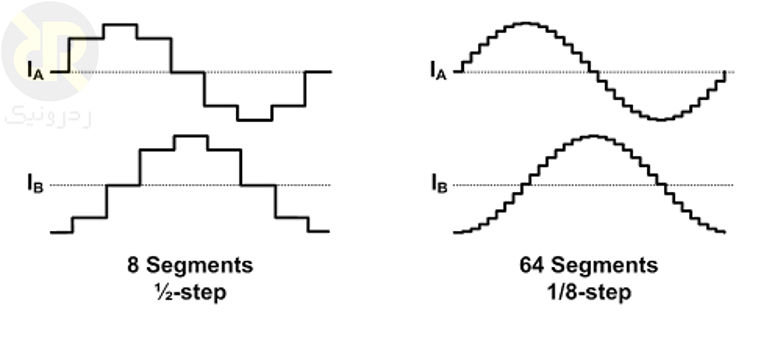
در این روش به جای اینکه فازهای استاتور به یک باره در حالت روشن و خاموش قرار گیرند، جریان یک فاز با رابطهی سینوسی و جریان در فاز مجاور با رابطهی کسینوسی (بدون اختلاف فاز بین آرگومانهای سینوس و کسینوس) تغییر میکند. لازم به ذکر است که منظور از جریان سینوسی و کسینوسی، یک سیگنال پیوستهی سینوسی/کسینوسی نیست؛ بلکه سیگنال به صورت گسسته و پلهای در بازههای مشخص و ثابتی، رفتاری مشابه با سیگنال سینوس/کسینوس دارد (شبیه به سیگنال دیجیتال شده). در شکل زیر دو نمونه سیگنال جریان دو فاز مجاور برای راندن موتور استپر در حالت میکرو استپ نمایش داده شده است.
نمونه سیگنال اعمالی به فاز در روش میکرو استپ
بدیهیست با کاهش گام گسستهسازی سیگنال میتوان گام استپ موتور را نیز کاهش داد.
موتور استپر رلوکتانس متغیر چند مرحلهای
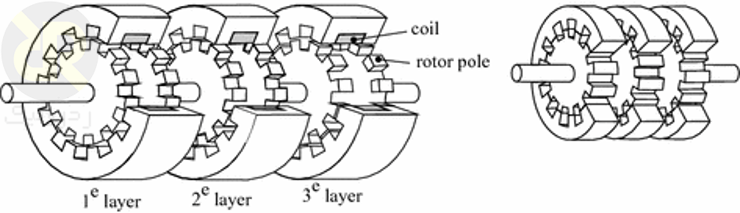
در این نوع از موتور استپر که با اصطلاح Multi-stack Variable Reluctance Stepper Motor شناخته میشوند، روتور و استاتور لایههای مختلفی دارند. در هر لایه تعداد و نوع دندانههای روتور و استاتور یکسان است. بنابراین با فعال شدن هر لایه از استاتور، روتور به گونهای گردش میکند که دندانههای نظیر فعال شده روی روتور، روبروی دندانههای استاتور قرار گیرند.
شماتیک استپ موتور چند مرحلهای
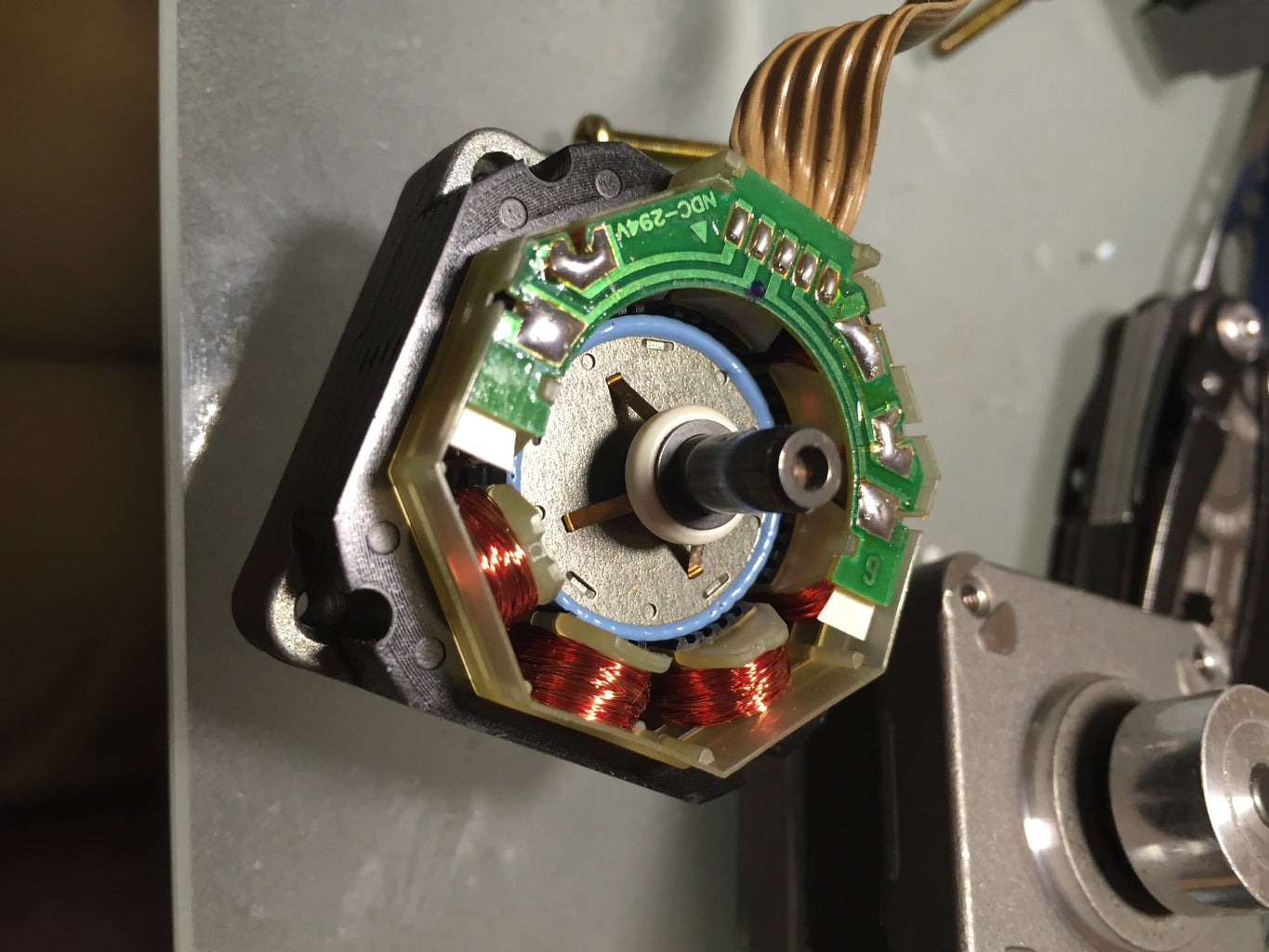
موتور استپر آهنربای دائم
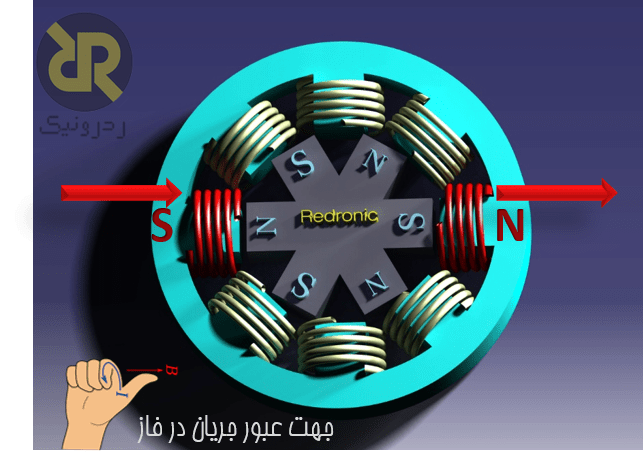
در این نوع از استپ موتورها قسمت روتور از یک آهنربای دائمی (Permanent Magnet) تشکیل شده است. به گونهای که روتور در راستای شعاعی دارای تعدادی قطب شمال و جنوب مغناطیسی است. این نوع موتورها نسبت به نوع رلوکتانس متغیر گشتاور بالاتری را تولید میکنند. همچنین مزیت دیگر این موتورها این است که روتور در هنگامی که جریانی در فازهای استاتور وجود نداشته باشد، موقعیت خود را حفظ میکند. نقطه ضعف اصلی موتور آهنربای دائم در این است که به دلیل دشوار بودن تولید روتور با قطبهای مغناطیسی در راستای شعاعی، زاویه گام آنها با محدودیت مواجه است. به صورتی که حداقل زاویه گام در این موتورها 7.5 درجه است.
ساختار استپر موتور آهنربای دائم
نکته حائز اهمیت برای راهاندازی این نوع از موتورهای استپر در این است که باید به جهت عبور جریان در هر فاز دقت کرد تا میدان مغناطیسی تولید شده توسط فاز، نزدیکترین دندانه روتور را جذب کند. بنابراین راهاندازی این نوع از موتورها اندکی مشکلتر از نوع رلوکتانس متغیر است.
موتورهای استپر آهنربای دائم را نیز مانند موتورهای رلوکتانس متغیر میتوان با روشهای ذکر شده برای رلوکتانس متغیر (روشهای Wave Drive، Full Step ، Half Step و Micro Stepping) راهاندازی کرد.
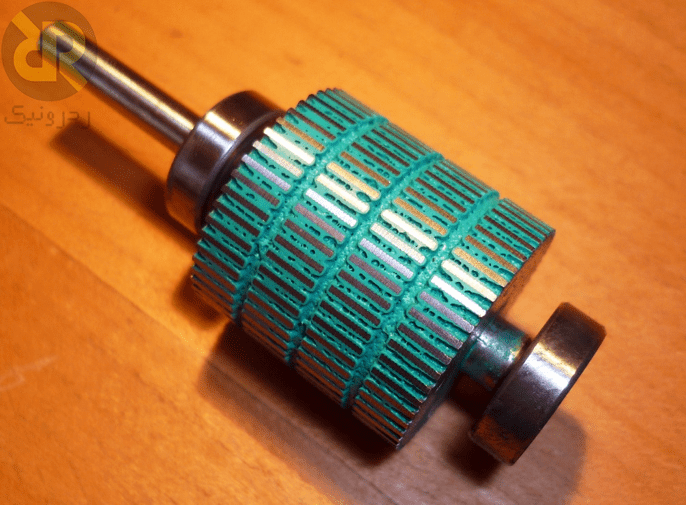
موتور استپر هیبریدی
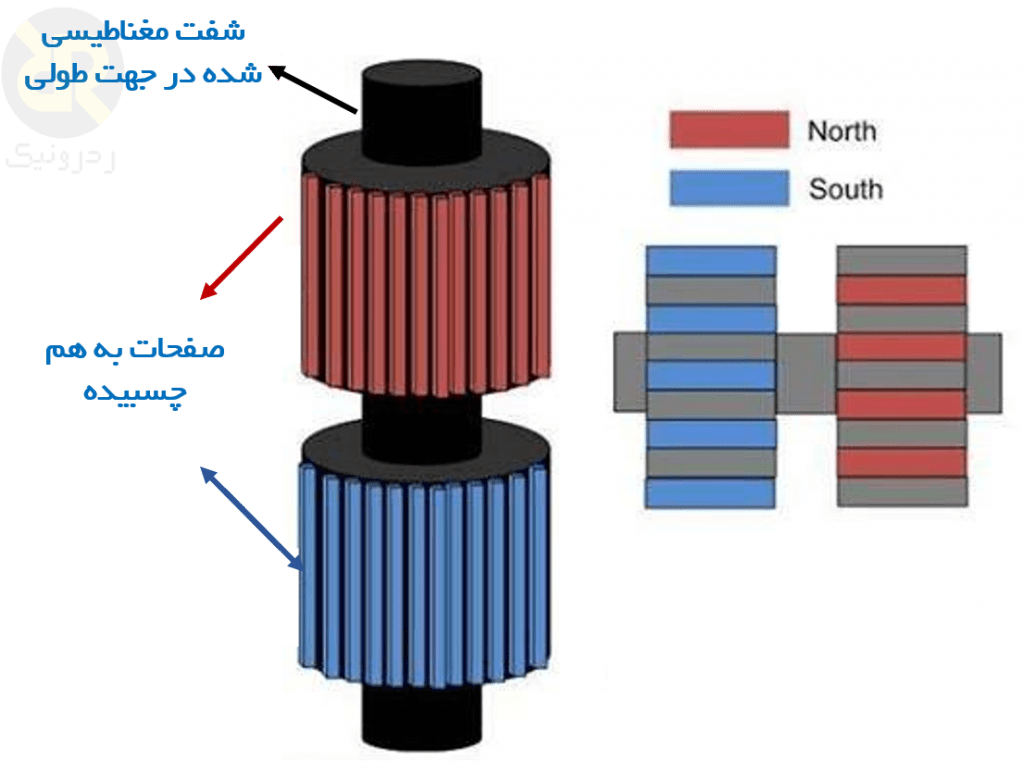
موتورهای استپر هیبریدی تلفیقی از ویژگیهای رلوکتانس متغیر و آهنربای دائم را دارند. روتور در این حالت خلاف روتورهای آهنربای دائم که بصورت شعاعی مغناطیسی میشوند، بصورت طولی مغناطیسی شده است. دو یا چند بخش دندانهای شکل مجزا روی این شفت مغناطیسی شده قرار گرفتهاند. هر بخش از تعدادی صفحهی به هم چسبیده از جنس استیل تشکیل شده است. علت ساخت دندانههای استاتور با استفاده از صفحه و سپس به هم چسباندن این صفحات این است که پروسهی ساخت یک صفحه با تعداد دندانههای بالا و ریز بسیار آسانتر از ساخت دندانههای استاتور به صورت یک جسم یکدست است.
دندانههای هر بخش (مجموعه صفحات به هم چسبیده با شکل دندانهای) با بخش دیگر مقداری اختلاف فاز دارند. به عنوان مثال در شکل زیر که یک موتور هیبریدی دو فاز را نمایش میدهد، دندانههای فاز آبی و قرمز به اندازهی نیم گام با هم اختلاف دارند.
ساختار روتور استپ موتور هیبریدی
با افزایش تعداد فازها یا تعداد دندانههای هر فاز میتوان به زاویهی گام بهتری (کوچکتری) دست پیدا کرد. به عنوان مثال در شکل زیر مشاهده میشود که هر یک از دو قسمت شمالی و جنوبی روتور به دو فاز مجزا با اختلاف فاز نیم گام تقسیم شدهاند.
نمونهای از روتور استپ موتور هیبریدی چهار فاز
اکثر موتورهای استپر موجود در بازار از نوع موتور استپر هیبریدی هستند.
برای مشاهدهی محصولات و خرید استپر موتور کلیک کنید.