
یک سامانهی مرجع سمت و تراز (AHRS: Attitude and Heading Reference System) از مجموعهای از حسگرهای سه محوره به منظور فراهم نمودن اطلاعات وضعیت یک پرنده شامل زوایای رول، پیچ و یاو تشکیل شده است.
فهرست مطالب
حسگرهای استفاده شده در AHRS
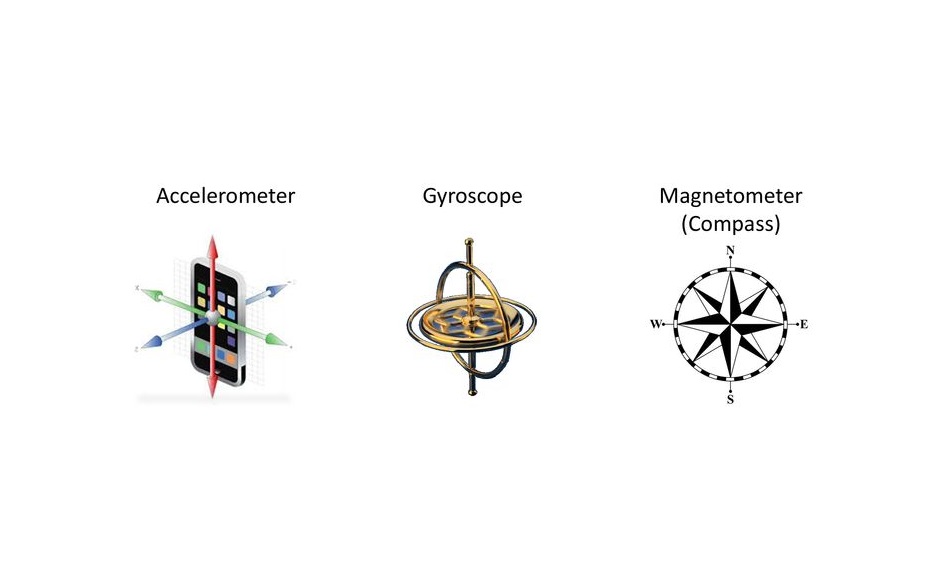
ژیروسکوپ سه محوره اصلیترین عضو از مجموعه حسگرهای یک AHRS است. علاوه بر این حسگر شتابسنج سه محوره نیز در کنار ژیروسکوپ عضو جدایی ناپذیر این سامانه است. معمولا قطعاتی که شامل حسگرهای ژیروسکوپ و شتابسنج هستند را واحد اندازهگیری اینرسی (IMU: Inertial Measurement Unit) مینامند. مغناطیسسنج سه محوره از دیگر حسگرهای موجود در این سامانه است. در برخی موارد قطعاتی که علاوه بر حسگرهای ژیروسکوپ و شتابسنج، حسگر مغناطیسسنج را هم دارند نیز با عنوان IMU میشناسند.
انواع مختلفی از حسگرها در سامانههای ARHS استفاده میشود. در ماژولهای ارزان قیمت حسگرهای استفاده شده از نوع MEMS هستند. در انواع گران قیمتتر که عمدتا کاربردهای نظامی دارند یا در هواپیماهای مسافربری استفاده میشوند از ژیروسکوپهای مکانیکی، فیبر نوری (FOG)، حلقه لیزری (RLG) و … استفاده میشود.
ژیروسکوپ چیست؟
تلفیق حسگرهای AHRS
الگوریتمهای محاسبهی زوایا (وضعیت) جسم تحت عنوان الگوریتمهای تلفیق حسگر (Sensor Fusion) شناخته میشوند. در واقع تفاوت اصلی یک AHRS با IMU در این است که AHRS در کنار داشتن مجموعه سنسورهای IMU، از یک پردازنده برای محاسبات الگوریتم تلفیق استفاده میکند.
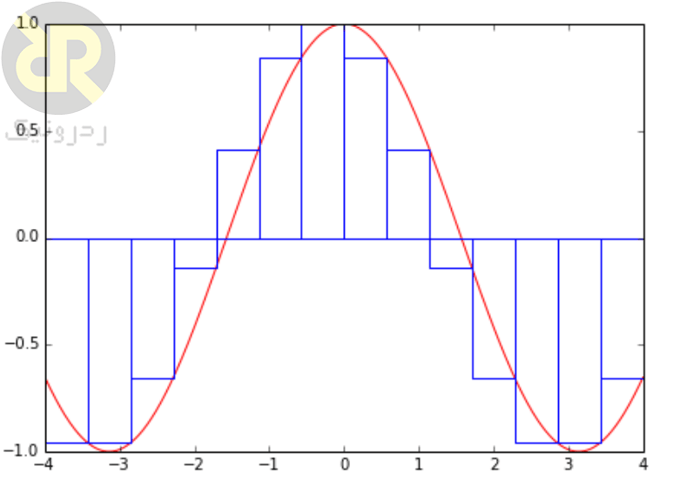
همانطور که پیشتر اشاره شد ژیروسکوپ اصلیترین عضو این مجموعه است. خروجی یک سنسور ژیروسکوپ سرعت زاویهای چرخش حسگر است. انتگرالگیری از این خروجی در حوزهی زمان از سه محور ژیروسکوپ زوایای رول، پیچ و یاو را میدهد. اما این روش محاسبهی زوایا ایراداتی دارد که در ادامه به آنها اشاره میشود.
ایرادات استفاده از ژیروسکوپ 1-خطای انتگرالگیری
انتگرالگیری از یک سیگنال دیجیتال همواره با مقداری خطا همراه است. هر چقدر فرکانس نمونهبردای از ژیروسکوپ و انتگرالگیری سریعتر باشد این خطا کمتر خواهد بود اما هیچگاه صفر نمیشود. همچنین روش انتگرالگیری از یک سیگنال گسسته (مستطیلی، ذوزنقهای و …) نیز روی دقت محاسبات تأثیر دارد.
ایرادات استفاده از ژیروسکوپ 2-ناپایداری پیشقدر
ناپایداری پیشقدر یا Bias Instability از مهمترین پارامترهای هر ژیروسکوپ است. واضح است که ژیروسکوپ در شرایط سکون (با صرف نظر کردن از چرخش زمین و منظومه شمسی و …) باید مقدار صفر را به عنوان خروجی بدهد. اما اکثر ژیروسکوپها مانند اکثر حسگرها مقداری پیشقدر یا آفست دارند که قبل از شروع به استفاده در فرآیند کالیبراسیون حسگر باید شناسایی و حذف بشود.
این مقدار پیشقدر در طی زمان ثبات ندارد، تا جایی که در برخی از حسگرهای ژیروسکوپ MEMS در صورت انتگرالگیری از خروجی در حالت سکون، بعد از گذشت یک ساعت حدود 20 درجه خطا بوجود میآید.
ایرادات استفاده از ژیروسکوپ 3-عدم وجود مرجع
همانطور که میدانید انتگرالگیری نیاز به شرایط (مقدار) اولیه دارد. بنابراین برای شروع انتگرالگیری از ژیروسکوپ زوایای اولیهی جسم باید معلوم باشد. اما ژیروسکوپ به تنهایی قابلیت تشخیص این موضوع را ندارد.
راه حل رفع ایرادات ژیروسکوپ
شتابسنج در حالتی که جسم حامل آن شتابی نداشته باشد تنها گرانش زمین را حس میکند. بنابراین خروجی این حسگر با تعیین کردن جهت بردار گرانش زمین که هم جهت با محور D در دستگاه NED است، مرجع مناسبی برای زوایای رول و پیچ است.
دستگاه NED در واقع دستگاه اینرسی در ناوبری روی زمین است. محورهای این دستگاه در جهت شمال (N: North) و شرق (E: East) و پایین (D: Down) هستند. محورهای شمال و شرق که در صفحهی افق هستند، مرجع زوایای رول و پیچ هستند. همچنین محور N به عنوان مرجع زاویهی یاو در نظر گرفته میشود (در حالتی که مرجع یاو جهت شمال جغرافیایی باشد به این زاویه Heading و در حالتی که مرجع شمال مغناطیسی باشد به آن Magnetic Heading یا هدینگ مغناطیسی میگویند).
همچنین مغناطیسسنج با شناسایی جهت شمال مغناطیسی مرجع مناسبی برای زاویهی یاو در دستگاه NED میباشد. بنابراین ایراد سوم استفاده از ژیروسکوپ که عدم وجود مرجع برای زوایا است، بدین صورت و با استفاده از شتابسنج و مغناطیسسنج سه محوره حل میشود.
با استفاده از دادههای شتابسنج و مغناطیسسنج به تنهایی میتوان مسئلهی تخمین زوایا را حل کرد. تاریخچهی این مسئله به سال 1965 میلادی برمیگردد. زمانی که آقای وابا (Wahba) سوالی که بعدا به مسئلهی وابا مشهور شد را مطرح کرد. در مسئلهی وابا هدف محاسبهی ماتریس انتقال بین دو دستگاه مختصات بود، در شرایطی که حداقل دو بردار خاص در هر دو دستگاه مشاهده شده باشند. این مسئله برای حل مشکلات ناوبری فضاپیماها مطرح شده بود.
مسئلهی تخمین زوایا با استفاده از حسگرهای شتابسنج و مغناطیسسنج نیز یک مسئله از جنس پرسش وابا است. زیرا این دو بردار شتاب گرانش و میدان مغناطیسی زمین با استفاده از این دو حسگر در دستگاه بدنی جسم حامل قابل مشاهده هستند. علاوه بر این، دو بردار ذکر شده در دستگاه NED نیز از قبل معلومند. بنابراین راهحل حل مسئلهی وابا علاوه بر ناوبری فضاپیما در این موضوع نیز کاربرد دارد.
از زمان مطرح شدن پرسش تا امروز روشهای بسیار متنوعی برای حل مسئلهی وابا ارائه شده است. استفاده از این روشها در سامانههای AHRS باعث میشود که علاوه بر تشخیص زوایا با استفاده از ژیروسکوپ بتوان زوایا را با استفاده از شتابسنج و مغناطیسسنج نیز بدست آورد. بنابراین برای کمتر کردن ایرادات استفاده از ژیروسکوپ میتوان با استفاده از این سنسورهای کمکی زوایا را مجددا محاسبه کرد و از تلفیق این محاسبات تخمین زوایا را بهینه نمود.
همانطور که قبلا اشاره شد، شتابسنج در صورت عدم وجود شتاب در جسم حامل، شتاب گرانش را مشاهده میکند. در صورتی که جسم شتاب داشته باشد، خروجی شتابسنج مجموع این شتاب و شتاب گرانش زمین خواهد بود. که این مسئله در تخمین زوایای جسم خطا ایجاد میکند. مغناطیسسنج نیز در معرض چنین خطایی وجود دارد، زیرا وجود یک جسم مغناطیسی در اطراف آن باعث میشود خروجی مغناطیسسنج مجموع میدان مغناطیسی زمین و میدان آن جسم باشد. بنابراین یکی از مسائلی که باید در الگوریتم تلفیق مورد توجه قرار گیرد میزان اعتماد کردن به این حسگرها برای اصلاح خطاهای ژیروسکوپ است.
معرفی محصول AHRS Quatrant
مهندسین تیم تحقیق و توسعهی شرکت صنایع الکترونیک خوارزمی افتخار میکنند که دو نمونه محصول بومی AHRS مبتنی بر حسگرهای MEMS را تحت عنوان تجاری QUATRANT طراحی، تولید و روانهی بازار نمودهاند. از ویژگیهای بارز QUATRANT میتوان به این نکته اشاره کرد که الگوریتم تلفیق حسگرها در آن به گونهای انجام شده است که اغتشاشات مغناطیسی و همچنین اغتشاشات ناشی از شتاب کمترین تأثیر را در تخمین زوایا در این محصول داشته باشد. علاوه بر این امکان کالیبراسیون آنلاین حسگرها در حین عملکرد نیز در الگوریتمهای پیاده شده در این محصول در نظر گرفته شده است. علاوه بر این نرمافزاری برای مشاهدهی دادههای خروجی این محصول و همچنین کالیبره کردن آن توسط این تیم طراحی شده است که به خریداران تقدیم میشود.


چرا انتگرالگیری از یک سیگنال دیجیتال همواره با مقداری خطا همراه است؟