سنسورهای اینرسی (Inertial Sensors) برای تبدیل نیروی اینرسی به سیگنالهای الکتریکی قابل اندازهگیری، برای سنجش شتاب، شیب و ارتعاش یک جسم مورد استفاده قرار میگیرند
فناوری میکروماشین تولید سنسورهای اینرسی MEMS (سیستم میکرو الکترومکانیکی) را با بهرهگیری از عناصر سنسور سیلیکونی تک کریستال ممکن ساختهاست.
این سنسورهای در اندازه میکرون، از تمام خصوصیات اصلی پیشبرنده طراحی این سیستمها، مانند: هزینه کم، عملکرد بالا، دقت زیاد و فاکتور فرم (form-factor) کوچک برخوردار میباشند. براساس قانونهای مشابه، سنسورهای اینرسی MEMS نیز مانند سنسورهای اینرسی ماکروسکوپی، با استفاده از یک سنسور در ابعاد چند میکرومتر، قادر به تشخیص کوچکترین تغییر در موقعیت، جهتگیری و شتاب یک جسم، در حد چند متر میباشند.
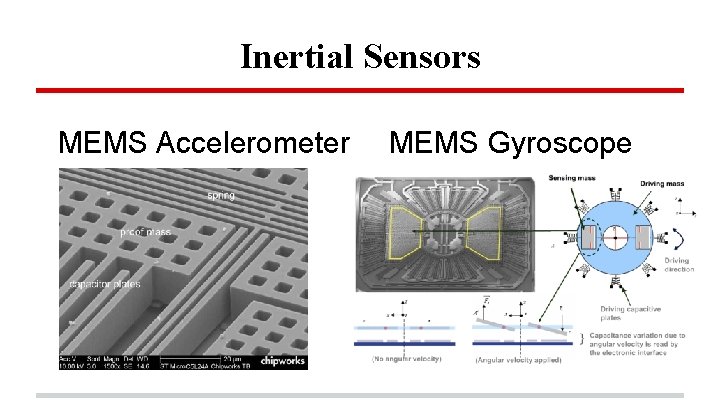
عمدتا، دو نوع حسگرهای اینرسی MEMS وجود دارند: شتابسنجها، شتاب خطی را در یک یا چند جهت اندازهگیری نموده و ژیروسکوپها حرکت زاویهای را مورد سنجش قرار میدهند. این سنسورها برای استفاده در کاربردهای خاصی تولید میشوند؛ زیرا هر کاربرد سنسورهای اینرسی به پهنای باند، رزولوشن و دامنه دینامیکی متفاوتی نیاز دارد.
1. سنسورهای اینرسی MEMS
برای مثال: سنسور اینرسی استفادهشده در سیستم رهاسازی کیسه هوای خودرو، باید دارای پهنای باند تا 0.5KHz، رزولوشن در حدود 500mG و دامنه دینامیکی 100G-/+ باشد؛ در حالی که سنسور اینرسی بهکاررفته در یک ابزار اندازهگیری میکروجاذبه فضایی، باید دارای پهنای باند 0-10Hz، دارای رزولوشن دقیق <1µG و دامنه دینامیکی کمتر از 1G-/+ باشد.
در حالت کلی، سنسورهای اینرسی قسمتی از سیستم کنترلی در هر اپلیکیشن یا دستگاهی میباشند. صرف داشتن اطلاعات از شتاب یا حرکت زاویهای یک جسم کاربردی ندارد، اطلاعاتی که از سنسور اینرسی جمعآوری میشود، همیشه برای کنترل حرکت خود دستگاه یا فعال کردن محرک (actuator) به کار گرفته میشود مانند: باز کردن کیسه هوا در یک خودرو.
کاربردهای حسگرهای اینرسی
درگذشته ساختن سنسورهای اینرسی یک فرآیند پرهزینه بود و تنها به کاربردهای نظامی و هوافضا محدود میشد، با پیشرفت سنسورهای اینرسی MEMS، امکانات لازم و استفاده از سنسورهای اینرسی در اتومبیل و بخشهای مختلف مصرفی الکترونیکی میسر گشت.
در صنایع اتومبیل، از شتابسنج، در کنترل رهاسازی کیسه هوا، کنترل کشش، کنترل کمربند ایمنی، سیستم تعلیق فعال، سیستم ترمز ضد انفجار (ABS) و نظارت بر ارتعاشات خودرو استفاده میشود؛ در حالی که ژیروسکوپ برای محافظت در برابر چرخش، نشانگرهای خودکار، فرمان برقی و کنترل دینامیک خودرو به کار گرفته میشود.
در بخش مصرفی، سنسورهای اینرسی برای کاربردهای مختلفی مانند: سکوی تثبیت در دوربینهای ویدئویی، هدست های واقعیت مجازی، دستگاههای اشارهگر برای رایانهها، اسباببازیهای هوشمند و صفحه کلیدهای بازی استفاده میشود. امروزه، همه تلفنهای همراه هوشمند و تبلتها دارای سنسورهای اینرسی برای تشخیص چرخش صفحه نمایش، بازی و برنامههای واقعیت افزوده میباشند.
سنسورهای اینرسی، همچنین برای نظارت بر موقعیت و جهتگیری بازوهای رباتیکی و خودروهای رباتیک بدون سرنشین کاربرد دارد. در کاربردهای پزشکی، این سنسورها برای مانیتورینگ (monitoring) بیماران با شرایط خاص، مانند: مانیتورینگ بیماران مبتلا به بیماری پارکینسون استفاده میشود. سنسورهای پیشرفته اینرسی برای کاربردهای نظامی و هوافضا، مانند: مهمات هوشمند، کنترل دینامیک هواپیما، تشخیص تصادف، سیستم بیرون انداختن صندلی در هواپیماها و اندازهگیری میکروجاذبه، به کار گرفته میشود.
شتابسنجها
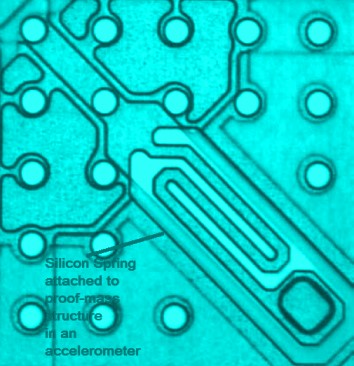
شتابسنج ها از یک عنصر sensor مکانیکی تشکیل شدهاند که شتاب را در یک یا تعداد بیشتری جهت اندازهگیری می نمایند. عنصر سنسور از یک جرم اثبات (جرم اثبات (proof mass) و یا جرم تست (test mass)، کمیت شناختهشده جرم است که در یک ابزار اندازهگیری به عنوان مرجع، برای اندازهگیری مقدار مجهول استفاده میشود.) که توسط سیستم تعلیق مکانیکی به یک قاب مرجع متصل شده است ،تشکیل میشود. در سنسورهای MEMS، جرم اثبات یک جرم لرزهای بسیار کوچک است و سیستم تعلیق از فنرهای سیلیکونی ساخته شده است.
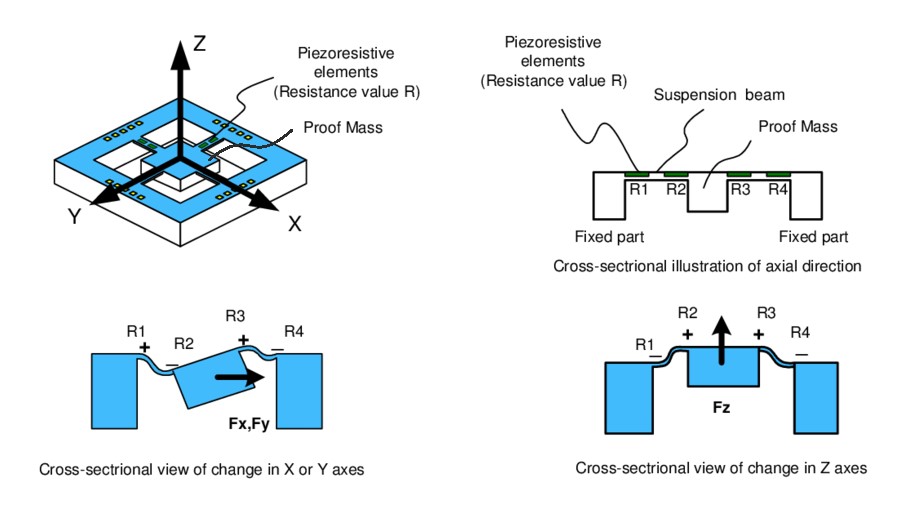
2. نمای بالای میکروطرح یک شتابسنج کوادرنت (quadrant)
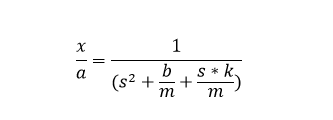
هرگاه سنسور به دلیل شتاب، مقداری از نیروی اینرسی را حس کند، جرم اثبات از موقعیت پایدار خود منحرف می شود. قانون دوم حرکت نیوتن بر این امر حاکم است. انحراف جرم اثبات به سمت شتاب یافتن، توسط یک معادله لاپلاس به شرح زیر بیان می شود:
در اینجا:
x نشاندهنده جابهجایی جرم اثبات،
a نشاندهنده شتاب،
s نشاندهنده عملگر لاپلاس،
b نشاندهنده ضریب میرایی،
m نشاندهنده جرمِ جرم اثبات،
k نشاندهنده ثابت فنر مکانیکی سیستم تعلیق میباشد.
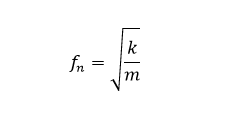
با معادله زیر، فرکانس تشدید سیستم بدست میآید :
با معادله زیر، فاکتور کیفیت را بدست میآوریم :
و با معادله زیر، حساسیت سنسور (حلقه باز) محاسبه میشود :
همان طور که میتوان دید؛ درصورت افزایش حساسیت، فرکانس تشدید کاهش مییابد و برعکس. این مسئله را با سیستم حلقه بسته میتوان تنظیم نمود. ضریب میرایی، بیشینهی پهنای باند شتابسنج را مشخص میکند. در شتابسنج های MEMS، ضریبمیرایی در بیشتر اوقات متغیر بوده و با جابجایی جرم اثبات افزایش مییابد.
در تمام انواع شتابسنجهای میکروماشینی، جابجایی جرم اثبات، توسط رابطهای اندازهگیری موقعیت، سنجش میشود. همانند اندازهگیری خازنی، صفحههای محرکی چسبیده به جرم اثبات وجود دارند که در امتداد جرم اثبات در بین الکترودهای خازنی ثابت حرکت میکنند. انواع مختلفی مکانیزمهای حسکنندگی در طراحی شتابسنجها وجود دارد. برخی از روشهای متداول آن، پیزورزیستوری، خازنی، پیزوالکتریکی، نوری و جریان تونلی (tunnelling current) میباشد.
شتابسنجها میتوانند دارای سیستم حلقهباز و یا حلقهبسته باشند. در صورتی که، سیگنالهای الکتریکی دریافت شده، توسط رابطهای اندازهگیری موقعیت، به صورت مستقیم به عنوان سیگنال خروجی استفاده شود؛ سیستم حلقه باز میباشد. بیشتر حسگرهای شتابسنج به دلیل سادگی ساخت حلقهباز هستند. با این حال؛ شتابسنجهای حلقهباز، به دلیل ضریب فنر متغیر، ضریب میرایی متغیر و جابجاییهای غیرخطی جرم اثبات، باید تلرانس بالایی را مدیریت کنند.
در شتابسنجهای حلقهبسته، یک سیستم فیدبکی وجود داشته که نیروی فیدبکی را متناسب با شتاب به جرم اثبات، اعمال میکند و جرم اثبات را به موقعیت استراحت برمیگرداند. در این حالت، فاکتورهای غیرخطی لغو می شوند، حساسیت به کنترل فیدبکی وابسته شده و دینامیک سنسور به صورت دقیق و مشخصی توسط کنترلر سیگنال الکتریکی کنترل خواهد شد. با فعال کردن الکترواستاتیکی، حرارتی یا مغناطیسی میتوان جرم اثبات را به موقعیت استراحت خود بازگرداند. در کنترل سیگنال فیدبک، نیروی فیدبک میتواند آنالوگ و یا دیجیتال باشد که همه این موارد سبب پیچیدهتر شدن طراحی سنسور خواهد شد.
روشهای حسکنندگی شتابسنج
راههای زیادی برای حس کردن شتاب در یک جهت خاص توسط شتابسنج وجود دارد. برخی از این روشها به شرح زیر خواهد بود:
در این نوع از شتابسنجها، جرم اثبات به یک پیزورزیستور متصل شده است. این مقاومت، به یک مدار الکترونیکی بازخوانی (read out) متصل شده است. زمانی که جابجایی در جرم اثبات رخ میدهد، متناسب با نیروی اعمال شده، در مقاومت پیزورزیستور تغییر رخ میدهد. این نوع شتابسنجها اولین بار است که به تولید انبوه میرسند. بزرگترین عیب این شتابسنجها، پایداری گرمایی آنها میباشد. مقاومت پیزو میتواند به دلیل نویز گرمایی به طور چشمگیری تغییر نموده و منجر به خروجی اشتباه در سیستم شود.
3. مثال نشاندهنده عملکرد شتابسنجهای پیزورزیستیو
2- شتابسنجهای خازنی (Capacitive Accelerometers)
در شتابسنجهای خازنی، انگشتان حسکننده خازنی (capacitive sense fingers) به جرم اثبات متصل میشوند و با جابجایی آن، در امتداد یک محور معین حرکت میکنند. هر صفحه متحرک بین دو الکترود قرار گرفته است؛ زمانی که شتاب وجود دارد، جرم اثبات در جهت مخالف حرکت جابهجا میشود و صفحه متغیر در امتداد آن حرکت میکند. تغییر در موقعیت صفحه متغیر در امتداد محور،سبب تغییر فاصله آن با صفحههای الکترودی شده و همچنین سبب تغییر متقارن در ظرفیت خازنی میگردد. سپس این امر به عنوان خروجی الکتریکی توسط یک مدار الکترونیک بازخوانی اندازهگیری میشود. شتابسنجهای خازنی ازنظر حرارتی پایدار میباشند؛ اما مستعد تداخل الکترومغناطیسی بوده و دراینصورت، میتوانند سبب خروجی غلط به دلیل پارازیت خازنی شوند.
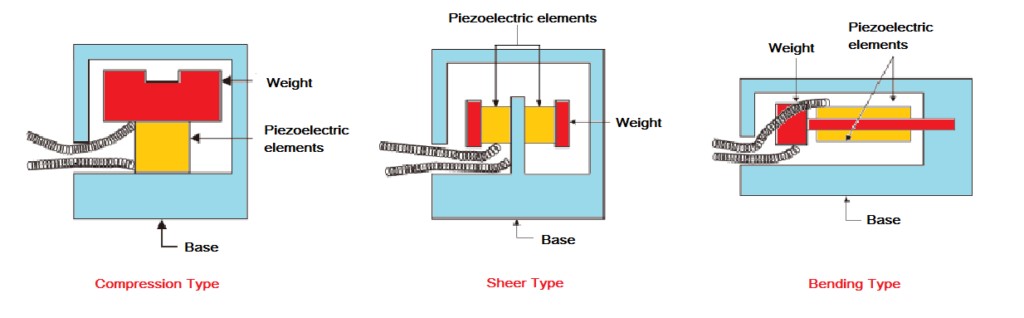
بیشتر شتابسنجهای ماکروسکوپیکی، از ماده پیزوالکتریک برای تشخیص حرکت جرم اثبات استفاده مینمایند. این امر، در شتابسنجهای میکروماشینی نیز، به دلیل استفاده از قانون مشابه برقرار است. این شتابسنجها دارای پهنایباند وسیع میباشند؛ اما بهدلیل وجود جریان نشتی، فرکانس تشدید آنها بسیار پایین است. ماده پیزوالکتریک، سیگنال الکتریکی را متناسب با جابهجایی جرم اثبات، در امتداد یک محور خاص تولید مینماید.
5. مثال نشاندهنده عملکرد شتابسنجهای پیزوالکتریک
4- شتابسنجهای تونلی (Tunnelling Accelerometers)
این نوع از شتابسنجها از جریان تونلی برای اندازهگیری جابهجایی جرم اثبات استفاده میکنند. جریان تونلی بین نوک تیز و الکترود با فاصله نوک- الکترود به صورت نمایی تغییر میکند. معادلهی زیر، جریان تونلی را نشان میدهد:
در اینجا:
I نشاندهنده جریان تونلی بین نوک و الکترود،
I0نشاندهنده جریان مقیاسگذاری شده وابسته به ماده مورد استفاده،
β نشاندهنده ضریب تبدیل،
φ نشاندهنده ارتفاع سد تونل در eV،
z نشاندهنده فاصله نوک-الکترود میباشد.
6. مثال نشاندهنده عملکرد شتابسنجهای تونلی
5– شتابسنجهای تشدید (Resonant Accelerometers)
در شتابسنجهای تشدید، جرم اثبات به تشدیدکننده متصل شدهاست. جابجایی آن، کرنش (Strain) تشدیدکننده و همچنین فرکانس تشدید را تغییر میدهد. این تغییر در فرکانس، توسط مدار شمارنده فرکانس به سیگنالهای الکتریکی دیجیتال تبدیل میگردد. این شتابسنجها کاملا در برابر نویز مصون بوده و از قابلیت اطمینان بالایی برخوردار میباشند زیرا تغییرات فرکانس را میتوان مستقیما به قالب دیجیتال تبدیل نمود.
7. مثال نشاندهنده عملکرد شتابسنجهای تشدید
6- شتاب سنج های نوری (Optical Accelerometers)
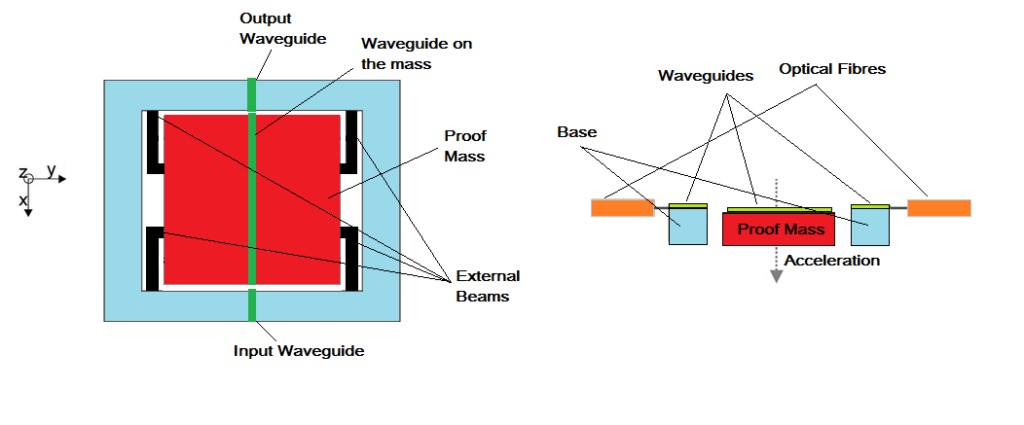
این شتابسنجها از فیبر نوری و راهنماهای موجی (wave guides) متصل به جریان اثبات استفاده میکنند. با این حال، نوع فیبر نوری شتابسنجها برای ساخت دستهای (batch) مناسب نیستند؛ زیرا فیبر باید به صورت دستی در نزدیکی جرم اثبات، در مجموعه سنسور نصب شود. نوع دیگری از شتابسنجهای نوری از آشکارسازهای LED و فوتوپین برای اندازهگیری جابجایی جرم اثبات، استفاده میکند. شتابسنجهای نوری این مزیت را دارند که فاقد تداخل الکترواستاتیکی و الکترومغناطیسی میباشند؛ اما از آنجایی که آنها معمولا شامل مجموعه پیچیده و مدار بازخوانی هستند، محبوبیت زیادی ندارند.
8. مثال نشاندهنده عملکرد شتابسنجهای نوری
ژیروسکوپها
ژیروسکوپ، چرخش یک جسم را اندازهگیری میکند. ژیروسکوپهای MEMS، از اصل نیروی کوریولیس (Coriolis force) استفاده میکنند. زمانی که یک جرم در یک سیستم چرخشی حرکت میکند، نیرویی عمود بر محور چرخش و جهت حرکت را تجربه مینماید، این نیرو را نیروی کوریولیس مینامند. ژیروسکوپ MEMS متشکل از یک ساختار مکانیکی است؛ که در اثر نیروی کوریولیس به سمت تشدید هدایت میشود و نوسانات ثانویه را در همان ساختار یا ساختار دوم تحریک میکند. نوسان ثانویه متناسب با چرخش ساختار در یک محور معین است. نیروی کوریولیس در مقایسه با نیروی محرکه خود دارای دامنه نسبتا کمی میباشد؛ به همین دلیل تمام ژیروسکوپهای MEMS از یک ساختار ارتعاشی استفاده میکنند که از پدیده نیروی کوریولیس بهره میگیرد.
9. مثال نشاندهنده عملکرد ژیروسکوپ MEMS
ساختار ارتعاشی از یک جرم اثبات، تشکیل شدهاست که توسط یک جفت فنر به یک قاب داخلی متصل میباشد. قاب داخلی، از طریق مجموعهی دیگری از فنرهای متعامد به یک قاب خارجی متصل میگردد. انگشتهای حسکننده خازنی، بین قاب داخلی و قاب خارجی متصل شده در امتداد فنرهای متعامد، وجود دارد. نیروی کوریولیس هم با سرعت جسم چرخان و هم با سرعت جسم نسبت به محور چرخش متناسب بوده و به سمت محور چرخش و یا در جهت مخالف آن است. هنگامی که سیستم در چرخش است؛ جرم اثبات، نیروی کوریولیس را در امتداد فنرهای متعامد متصل شده بین قاب داخلی و خارجی تجربه مینماید. این امر، فاصلهی بین انگشتان حسکننده خازنی را تغییر میدهد و بنابراین سیگنال الکتریکی متناسب با نیروی کوریولیس خروجی خواهد بود. ازآنجایی که نیروی کوریولیس متناسب با سرعت زاویهای میباشد، سیگنال الکتریکی ناشی از آن، متناسب با سرعت زاویهای سیستم نیز، خواهد بود.