برد توسعه رباتیک ROBO SHIELD متناسب برد آموزشی AVR WIZARD ،مناسب برای فراگیری پریفرالهای ADC ,PWM UART , و کار با پورتهای IO انواع میکروکنترلرهای مختلف میباشد. دراین برد راهاندازی انواع موتورهای DC و سروو و کار با ماژولهای مادون قرمز مسیریاب و تشخیص سرعت و راهاندازی ماژولهای فاصلهسنج آلتراسونیک و GP2D را فرا خواهید گرفت. داخل این برد مدار درایور موتور L298 برای راهاندازی موتورهای DC قرار گرفته است. از ویژگی مهم این برد قابلیت اتصال ماژول وایفای ESP-01 بوده تا با استفاده از آن به صورت بیسیم با برد توسعه ارتباط برقرار کرده و با استفاده از گوشی و یا تبلت خود ربات را کنترل کنید. همچنین از ویژگیهای دیگر آن قابلیت اتصال به آردوینو و دیگر بردهای میکروکنترلی میباشد.
فهرست مطالب
راهنمای استفاده از برد توسعه ROBO SHIELD
ملاحضات ایمنی
تعریف علائم هشداری
در این راهنما، علائمی که در ادامه معرفی میشود، برای آگاه سازی کاربر در برابر خطرات احتمالی به کار میروند تا مطمئن شویم از محصول به درستی استفاده خواهد شد.
علائم هشداری بسیار مهم هستند و توصیه میشود قبل از استفاده از محصول، همه آنها مورد توجه قرار گیرند.
علائم استفاده شده عبارتند از:
نشان دهنده وضعیت خیلی خطرناک است و ممکن است خطرات جانی و خسارات جبران ناپذیری در پی داشته باشد.
نشان دهنده وضعیتهای خطرناکی است که میتواند منجر به آسیبها و خسارات مالی شود.
نمادها
نماد دایره و یک اسلش، نشانگر عملی است که هرگز نباید انجام شود.
عمل مورد نظر، داخل دایره نشان داده میشود و توضیحات آن در متن میآید.
در این مثال، جداسازی قطعات ممنوع است.
نماد مثلث، بیانگر احتیاط است (شامل هشدار هم میشود).
عمل مورد نظر، در داخل مثلث نشان داده میشود و توضیحات آن در متن میآید.
این مثال، احتیاط در برابر شوک الکتریکی را نشان میدهد.
نماد مثلث، بیانگر احتیاط است (شامل هشدار هم میشود).
عمل مورد نظر، در داخل مثلث نشان داده میشود و توضیحات آن در متن میآید.
این مثال، احتیاط کلی را نشان میدهد.
دایره پر، نشان دهنده عملی است که باید حتما انجام شود.
عمل مورد نظر، داخل دایره نشان داده میشود و توضیحات آن در متن میآید.
مثال نشان دهنده احتیاطهای عمومی است که باید حتما انجام شود.
هشدارهای هنگام روشن کردن تغذیه
از جداسازی ماژولها خود داری کنید.
پلاریته تغذیه به صورت صحیح وصل باشد.
اطمینان حاصل نمایید ولتاژ و جریان ورودی در محدوده مجاز قرار دارند.
ولتاژ و جریان خارج از محدوده مجاز، سبب آسیب رسیدن به محصول و یا آتشسوزی خواهد شد.
مطمئن شوید بدنتان الکتریسیته ساکن ندارد. الکتریسیته ساکن میتواند اجزای مدار را از کار بیاندازد یا در کارشان اخلال ایجاد کند.
در هنگام اتصال حسگرها، به شماره کانکتورها و ترتیب پایههای آن دقت نمایید. تغذیه اشتباه حسگرها منجر به آسیب رسیدن به آنها خواهد شد.
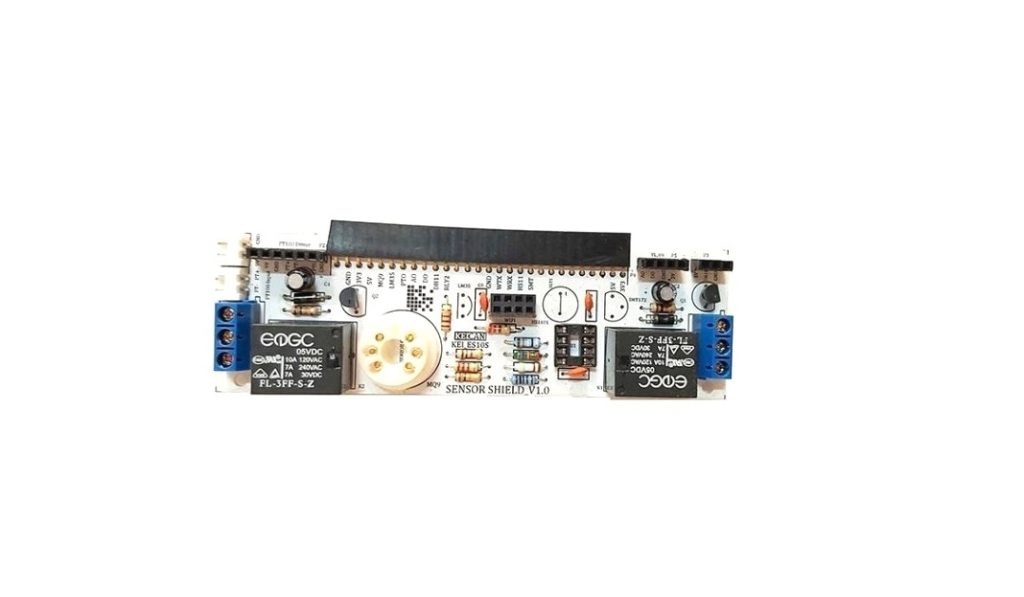
برد ROBO SHIELD در یک نگاه
مشخصات کلی
این برد که بهعنوان برد توسعه محسوب میشود، برای سهولت آموزش و ملموس بودن بهتر الکترونیک برای کاربر، تمام قطعات آن به صورت DIP طراحی شدهاست. بردهای توسعه بردهایی جانبی برای برد آموزشی AVR WIZARD بوده که برای انجام پروژههای مختلف با میکروکنترلر 32–Atmega16 طراحی شدهاند.
از ویژگی این بردها قابل استفاده بودن آنها بدون نیاز به بردآموزشی AVR WIZARD میباشد. یعنی کاربر میتواند با هر پردازنده و برد دلخواه دیگری از بردهای توسعه برای پروژههای مختلف استفاده کند. (به دلیل استفاده راحت و Pin to Pin بودن با برد آموزشی AVR WIZARD و عدم نیاز به سیمکشی توصیه ما به کاربران عزیز تهیه برد آموزشی AVR WIZARD همراه بردهای توسعه می باشد تا به راحتی با داشتن AVR WIZARD دهها پروژه مختلف را به سهولت انجام دهند.)
برد توسعه رباتیک برای برد آموزشی AVR WIZARD مناسب برای فراگیری پریفرالهای ADC ,PWM UART و کار با پورتهای IO میکروکنترلر AVR سری 32-Atmega16 و فراگیری راهاندازی انواع موتورهای DC و سروو و کار با ماژولهای مادون قرمز مسیریاب و تشخیص سرعت و اتصال ماژولهای فاصلهسنج آلتراسونیک و GP2D میباشد. در این برد درایور موتور L298 برای راه اندازی موتورهای DC قرار گرفته است .
از ویژگی مهم این برد قابلیت اتصال ماژول وایفای ESP-01 است تا با استفاده از آن به صورت بیسیم با برد توسعه ارتباط برقرار کرده و با استفاده از گوشی و یا تبلت خود ربات را کنترل کنید.
مراحل راه اندازی ROBO SHIELD با استفاده از برد اصلی AVR WIZZARD
۱- کلید تغذیه برد AVR WIZARD را در حالت “خاموش” قرار دهید.
۲- از قرار داشتن صحیح میکروکنترلر و LCD در سوکتهای مختص اطمینان حاصل فرمایید .
۳- برد ROBO SHIELD را به طور کامل و صحیح به برد اصلی AVR WIZARD متصل کنید.
۴- در صورت استفاده از هر یک از ماژولها و المانهای جانبی در برد SENSOR SHIELD از اتصال صحیح آنها اطمینان حاصل کنید.
۵- توسط جامپر، ولتاژ ورودی برای موتورها را انتخاب کنید.
۶- کانکتور تغذیه را وصل نمایید و سپس کلید را در وضعیت “روشن” قرار دهید.
۷- پس از گذشت چند لحظه، برد راهاندازی شده و قابل استفاده میباشد.
مراحل راهاندازی ROBO SHIELD بدون استفاده از برد اصلی AVR WIZARD
۱- در صورت استفاده از هر یک از ماژولها در برد ROBO SHIELD از اتصال صحیح آنها اطمینان حاصل کنید.
۲- به تمام پینهایی که ولتاژ آن بر روی برد مشخص شده دقیقا همان ولتاژ اعمال شود ( توجه شود در صورت تعدد پین با یک ولتاژ مشخص به هر یک از پینها همان ولتاژ اعمال شود به عنوان مثال، در صورت وجود ۳ پین با ولتاژ ۵ ولت، به هر ۳ پین ۵ ولت اعمال شود).
۳- حال به راحتی میتوان به پینهای دیتا و کنترلی برد دسترسی داشت.
طرز استفاده از محصول ROBO SHIELD
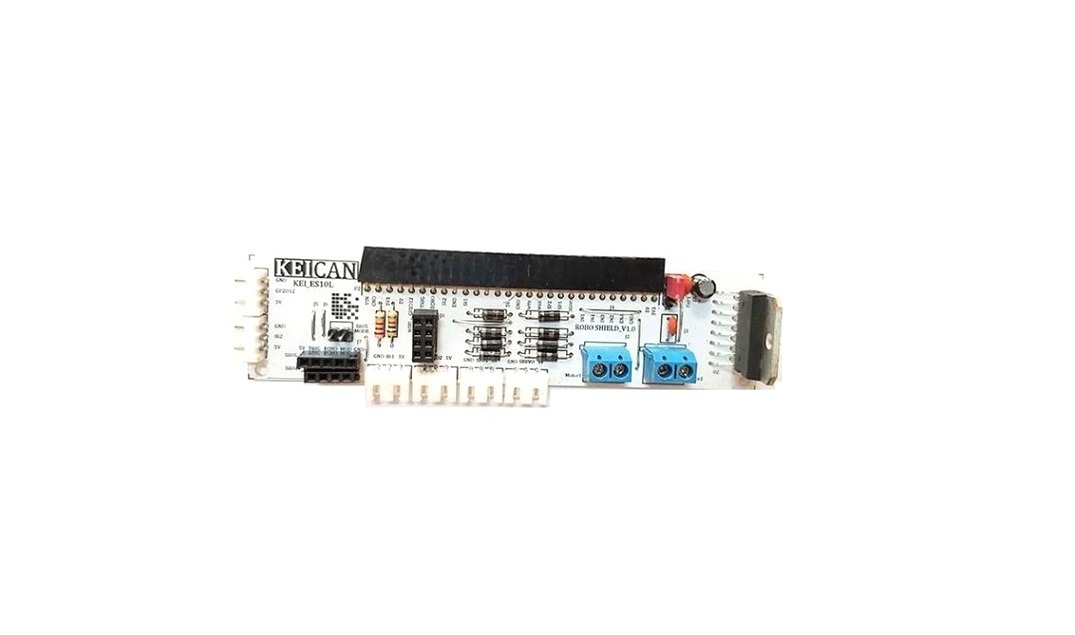
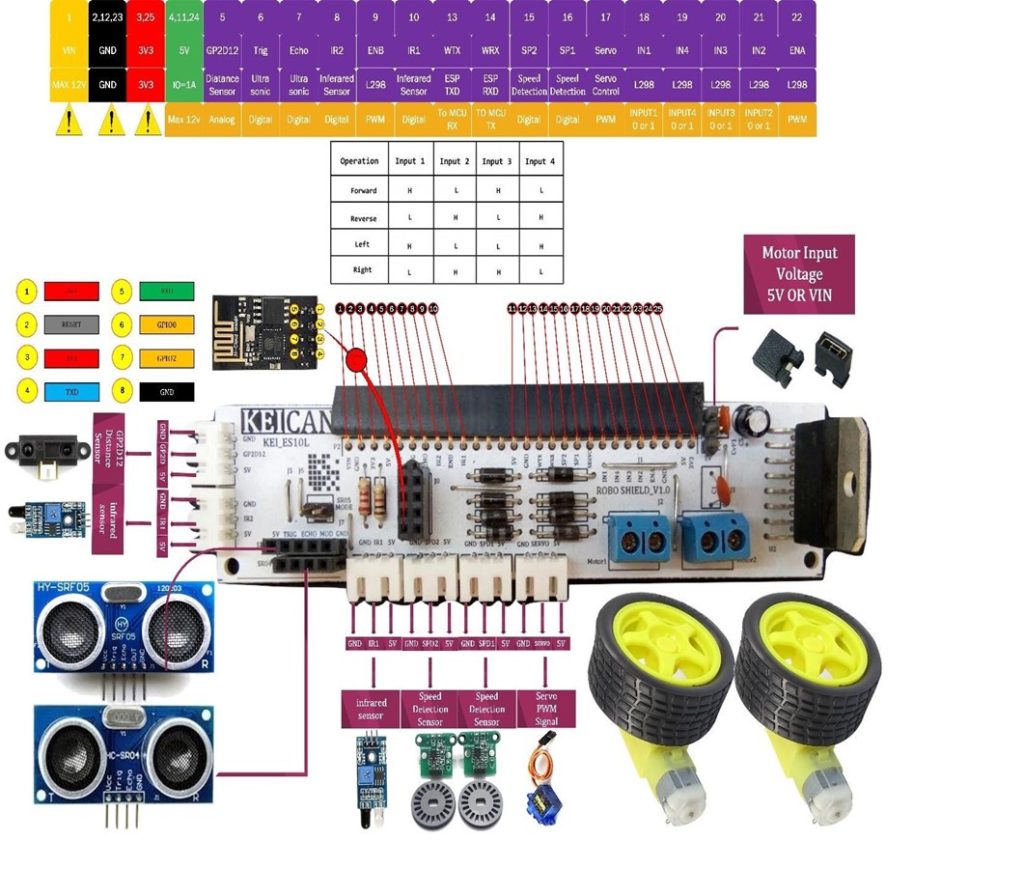
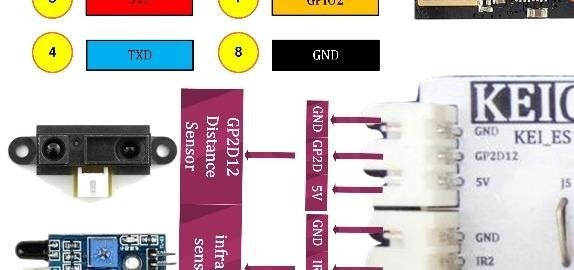
در برد توسعه SENSOR SHIELD مانند تصویر ۱ تمام پایههایی که برای راهاندازی سنسورها و ماژولهای مورد استفاده قرارگرفته در دسترس میباشد. در صورت اتصال این برد به برد اصلی AVR WIZARD دیتای خروجی سنسور مورد نظر را با پین متناظر در برد اصلی AVR WIZARD میخوانید. در غیر این صورت دیتای خروجی مورد نظر را با استفاده از میکرو و یا هر برد آموزشی دیگر مانند آردوینو میتوانید بخوانید.
1. پین های قابل دسترس در برد توسعه ROBO SHIELD
اتصال موتور ها
ماژول در برد توسعه ROBO SHIELD از درایور موتور L298 استفاده شده است که با توجه به قابلیتهای این درایور موتور کاربر به راحتی میتواند همزمان از 2 موتور در پروژههای مختلف استفاده کند. در تصویر شماره ۲، نحوه اتصال موتورها به برد ROBO SHIELD نشان داده شده است:
2. نحوه اتصال موتورها
انتخاب ولتاژ ورودی به موتورها
با استفاده از جامپر نشان داده شده در تصویر شماره ۳، می توان ولتاژ اعمالی به موتورها را انتخاب کرد. این ولتاژ میتواند ۵ ولت یا ولتاژ اعمال شده به برد باشد:
درایور موتور L298
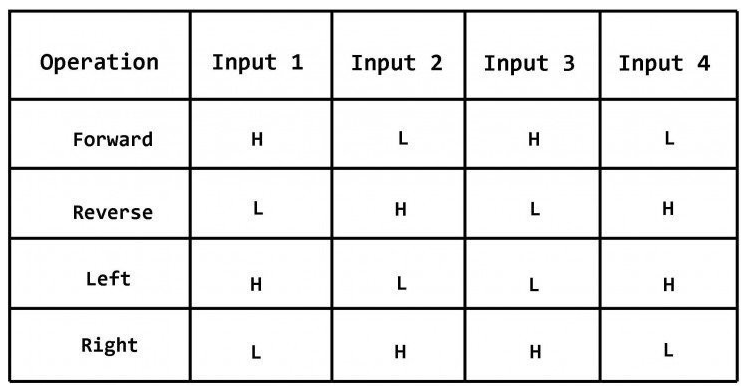
در برد توسعه ROBO SHIELD مدار درایور L298 طراحی شده است که کاربر به راحتی به پایههای کنترلی درایور موتور دسترسی دارد. در تصویر شماره ۴ نحوه مقدار دهی به هر سیگنال را مشاهده میکنید. سیگنالهای مشخص شده با ENA و ENB برای کنترل سرعت موتور با PWM و پینهای با برچسب IN1,IN2,IN3,IN4 جهت چپگرد، راستگرد و توقف موتور میباشد.
4. نحوه کنترل موتور
اتصال سروو موتور
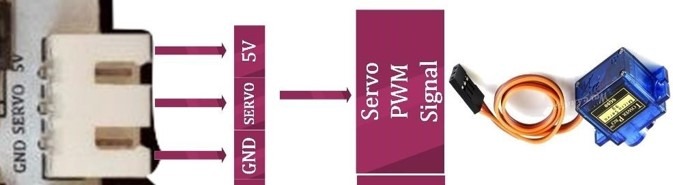
مانند تصویر شماره ۵، کاربران به راحتی میتوانند انواع سروو موتورهای مختلف را به برد توسعه ROBO SHIELD اتصال کرده و در پروژههای مختلف رباتیک ازآن بهرهمند شوند. پین مشخص شده با برچسب SERVO جهت اعمال PWM برای چرخش سروو موتور میباشد:
5. نحوه اتصال سروو موتور
ماژول ESP8266 Wi-Fi
با استفاده از ماژول ESP8266 به راحتی میتوان تمام اطلاعات دریافتی از سنسورهای مختلف را به صورت بیسیم ارسال کرده و ربات خود را به صورت بی سیم از طریق گوشی هوشمند کنترل کنید، پینهای مربوط به رابط سریال ماژول با برچسبهای WTX و WRX بر روی برد نمایش داده شده است.
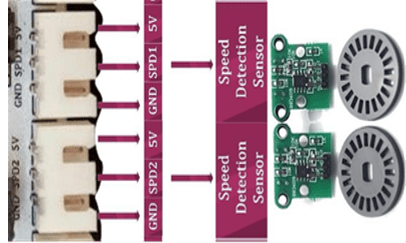
سنسورهای مادون قرمز تشخیص سرعت
با استفاده از سنسورهای تشخیص سرعت کاربر میتواند مسافت طیشده و سرعت دور موتور را به راحتی محاسبه کند. برچسبهای SPD1 و SPD2 مربوط به پین خروجی سیگنالهای ماژول میباشد که در صورت عبور هر یک از حفره ها خروجی ۰ می شود. در تصویر شماره ۶ نحوه استفاده از ماژول را مشاهده می کنید:
6. محل اتصال سنسورهای تشخیص سرعت
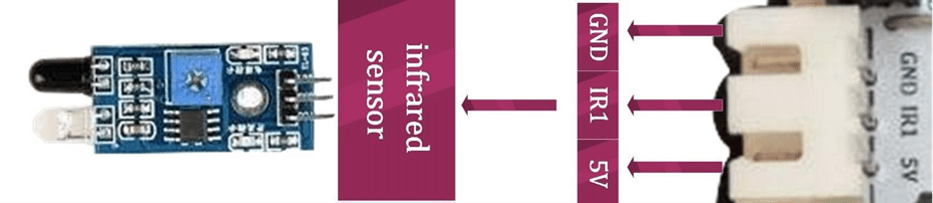
سنسورهای مادون قرمز مسیریاب
با استفاده از سنسورهای مادون قرمز مسیریاب کاربر می تواند از برد توسعه رباتیک ROBO SHIELD به راحتی در ساخت رباتهای مسیریاب استفاده کند. برچسبهای IR1 و IR2 مربوط به پین خروجی سیگنالهای ماژول میباشد که در صورت تشخیص رنگ سیاه خروجی ۰ میشود. در تصویر شماره ۷ نحوه استفاده از ماژول را مشاهده میکنید:
7. محل اتصال سنسورهای مسیریاب
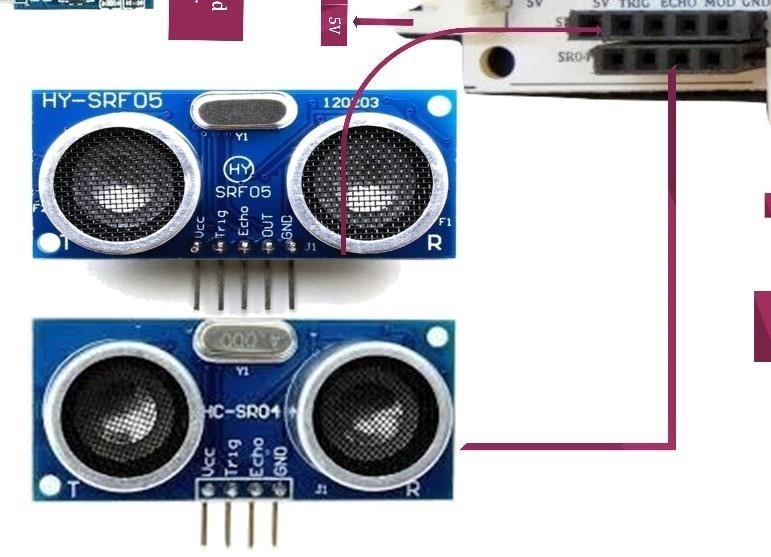
سنسور دیجیتال تشخیص مسافت اولتراسونیک
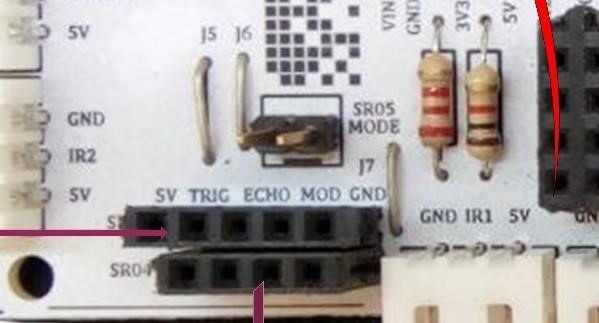
در برد ROBO SHIELD کاربر به راحتی می تواند از سنسورهای اولتراسونیک ۰۵-SRF و ۰۴-SRF به راحتی در سوکتهای مشخصشده مربوط به هر یک استفاده کند. این ویژگی باعث میشود تا از برد توسعه ROBO SHIELD به راحتی در پروژههای رباتیک تشخیص مانع استفاده کرد. در تصویر ۸ محل قرارگیری سنسورهای اولتراسونیک ۰۵-SRF و ۰۴-SRF را مشاهده میکنید:
8. محل قرار گیری سنسور های SRF05 و SRF04
نکته: با استفاده از جامپر با برچسب SR05 MODE میتوانید حالت کاری سنسور ۰۵-SRF را انتخاب کنید. با گذاشتن جامپر، پایه MODE یا OUT ماژول ۰۵-SRF زمین (صفر) میشود.
سنسور انالوگ تشخیص مسافت GP2D12
سنسور GP2D12 یک سنسور فاصلهسنج با خروجی آنالوگ بوده که به راحتی خروجی آن را با ADC میتوان خواند. این سنسور از دقت بالایی برخوردار بوده و به راحتی میتوان از آن در پروژههای رباتیک استفاده کرد. در تصویر ۹ محل قرار گیری سنسور GP2D12 را مشاهده میکنید: