

مدارهای سادهای میتوانند برای روشن و خاموش کردن یک چراغ یا پخش کردن یک نت موسیقی ساده ساخته شوند.
اما اگر یک مدار الکترونیکی برای اجرای وظایفی خاصی نیاز باشد باید بتواند با دنیای واقعی ( به عنوان مثال از طریق خواندن فرمان روشن و خاموش کردن ورودی یا از طریق ارسال فرمان برای فعال سازی یک مدار ) ارتباط برقرار کند.
به عبارتی دیگر یک سیستم الکترونیکی یا یک مدار باید بتواند فرمانهایی را دریافت و یا ارسال کند و سنسورها و مبدل یا ترنسدیوسرها به ارتباط مدار با دنیای بیرون کمک میکنند.
سنسورها وظیفه دارند پارامترهای مختلف ( مانند حرکت، سیگنال های الکتریکی ، انرژی تابشی ، حرارت و میدان مغناطیسی و …) را تشخیص دهند و از راهاندازها برای ارسال فرمان روشن یا خاموش به مدار استفاده میشود .
انواع متنوعی از سنسورها و مبدلها موجود هستند که به دستههای دیجیتال و آنالوگ یا ورودی و خروجی تقسیم میشوند.
انتخاب نوع سنسور یا مبدل بستگی به ماهیت سیگنالی دارد که قرار است با آن سروکار داشته باشد البته در برخی مواقع نیز سیگنال از نوعی به نوع دیگر تبدیل میشود تا با مشخصات مبدل همخوانی داشته باشد .
سنسورها معمولاً در ورودی مدارها قرار میگیرند که قاعدتاً میزان تغییرات را در یک فرایند یا یک المان احساس میکنند به عنوان مثال گرما یا فشار تبدیل به یک سیگنال الکتریکی میشود. عملگرها معمولاً در خروجی مدارها به کار میروند که از آنها برای کنترل دستگاههای خارجی استفاده میشود.
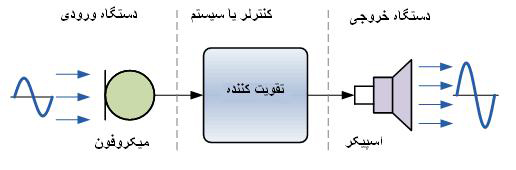
مبدلهای الکتریکی میتوانند ماهیت پارامترهای مورد اندازهگیری را تغییر دهند. به عنوان مثال یک میکروفون امواج صوتی را به سیگنالهای الکتریکی تبدیل میکند؛ در مرحلهی بعد تقویتکننده، سیگنالهای الکتریکی را تقویت میکند و بلندگو ( المان خروجی ) این سیگنالهای الکتریکی را به امواج صوتی تبدیل میکند .
یک سیستم ورودی / خروجی ساده که با استفاده از مبدلهای صوتی طراحی شده
سنسورها و مبدل ها انواع مختلفی دارند و اینکه کدام یک باید در مدار مورد استفاده قرار بگیرند بستگی به پارامتر مورد اندازهگیری دارد سنسورها و مبدل هایی که به کرات مورد استفاده قرار می کیرند در جدول زیر نشان داده شده :
سنسور و ترنسدیوسرهای رایج
|
کمیت اندازهگیری
|
دستگاه ورودی (سنسور)
|
دستگاه خروجی (اکچویتور)
|
|---|---|---|
|
میزان نور
|
مقاومت نوری (LDR) - فوتودیود -فوتوترانزیستور - سلول خورشیدی
|
لامپ ها - ال ای دی ها و نمایشگرها - فیبر نوری
|
|
دما
|
ترموکوپل - ترمیستور - ترموستات سنسورهای دمای مقاومتی
|
هیتر - فن ...
|
|
نیرو / فشار
|
کشش سنج - سوییچ فشاری
|
لیفت ها و جک ها - آهنرباهای الکتریکی
|
|
موقعیت
|
پتانسیومتر - انکودرها - سوییچ های اپتیکی دارای اسلات - LVDT
|
موتور - سلنوئید- پنل متر
|
|
سرعت
|
ژنراتورهای که ولتاژ تولیدی آنها به سرعت محورشان وابسته است - اپتوکوپلر - سنسورهای اثر داپلر
|
موتور های AC و DC - استپ موتور - برخی ترمزها
|
|
صدا
|
کریستال های پیزوالکتریک - برخی میکروفون ها
|
زنگ - بازر - بلندگو
|
سنسورها و مبدلهای ورودی یک سیگنال خروجی پاسخ تولید میکنند که با تغییرات در میزان محرکهای اندازه گیری شده تناسب دارد نوع یا مقدار سیگنال خروجی بستگی به سنسورمورد استفاده دارد اما به طور کلی تمام سنسورها میتوانند به دو دسته طبقه بندی شوند :
سنسورهای اکتیو برای راه اندازی به یک منبع تغذیه خارجی نیاز دارند و سیگنالی که از منبع دریافت میکنند سیگنال محرک نام دارد که سنسور از آن برای ساخت سیگنال خروجی استفاده میکند .
مشخصات سنسورهای اکتیو نسبت به شرایط محیطی تغییر میکند به عنوان مثال ولتاژ DC خروجی دریافتی میتواند بین یک یا ۱۰ ولت تغییر کند یا جریان DC خروجی می تواند بین ۴ تا ۲۰ میلی آمپر تلورانس داشته باشد .
در ضمن سنسورهای اکتیو میتوانند عمل تقویت سیگنال را نیز به انجام برسانند.
به عنوان نمونه سنسور LVDT یا یک کشش سنج، سنسور فعال میباشد .
کشش سنج ها المان هایی حساس به فشار هستند که از یک شبکه پل های مقامتی متشکل شدهاند و توسط یک منبع خارجی بایاس میشوند تا ولتاژ خروجی متناسب با میزان نیرو یا کششی که به سنسور وارد شده را تولید کنند .
بر خلاف سنسورهای اکتیو، سنسورهای پسیو نیاز به منبع تغذیه خارجی یا ولتاژ تحریک ندارند بلکه این نوع سنسورها در پاسخ به محرکهای خارجی یک سیگنال خروجی تولید میکنند. به عنوان مثال هنگامی که یک ترموکوپل در معرض گرما قرار میگیرد خودش میتواند یک ولتاژخروجی را تولید کند. بنابراین سنسورهای پسیو، سنسورهایی مستقیم هستند که میتوانند مشخصههای فیزیکی خود مانند مقاومت، اندوکتانس و ظرفیت خازنی را تغییر دهند.
سنسورهای دیجیتال یک خروجی ناپیوسته که به صورت یک عدد باینری است را تولید میکنند و با دو سطح منطقی یک یا صفر سر و کار دارند .
سنسورهای آنالوگ و دیجیتال
سنسورهای آنالوگ
سنسورهای آنالوگ، یک سیگنال خروجی پیوسته تولید میکنند که با مقادیر اندازهگیری شده متناسب است. پارامترهایی همچون دما ، سرعت ، فشار ، جابجایی ، کشش و … مقادیر آنالوگی هستند که به طور طبیعی پیوستهاند. به عنوان مثال شما میتوانید دمای یک مایع را از طریق یک ترمومتر یا ترموکوپل که به طور پیوسته به تغییرات دما پاسخ میدهد اندازهگیری کنید.
از ترموکپل برای ساختن یک سیگنال آنالوگ استفاده میشود
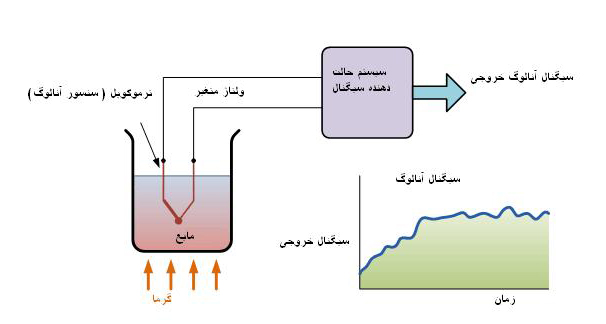
سنسورهای آنالوگ، سیگنالهای خروجی را تولید میکنند که در طول زمان آرام و پیوسته تغییر میکند. این سیگنال ها دامنههای فوقالعاده کمی ( در بازه چند میکرو ولت تا چند میلی ولت) دارند بنابراین باید به گونهای تقویت شوند.
بنابراین مدارهایی که سیگنالهای آنالوگ را اندازهگیری میکنند سطح پاسخ فوقالعادهای پایینی دارند و متعاقباً دقت آنها نیز پایین است در ضمن سیگنال های آنالوگ به راحتی میتوانند توسط مبدل آنالوگ به دیجیتال (ADC) به سیگنال های دیجیتال تبدیل شوند تا در مدارات دارای میکروکنترلر مورد استفاده قرار بگیرند .
سنسورهای دیجیتال
همانطور که از نام آن پیداست سنسورهای دیجیتال سیگنال های خروجی ناپیوسته تولید میکنند. این سیگنال ها غالباً به صورت سطوح ولتاژی هستند که نشانگر مقادیر اندازهگیری شده میباشد. سنسورهای دیجیتال سیگنالهای خروجی باینری را به صورت منطق یک یا صفر ( روشن یا خاموش ) تولید میکنند و این بدان معناست که یک سیگنال دیجیتال تنها دارای مقادیر ناپیوسته است که یا به صورت تک بیتی ( انتقال سریال ) یا به صورت چند بیتی ( انتقال موازی ) ارسال میشوند.
سنسورهای نوری چگونه سیگنال دیجیتال تولید میکنند؟
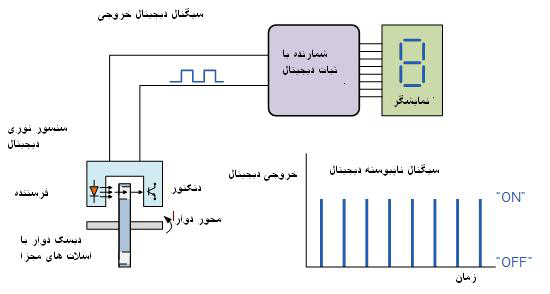
در مثال بالا سرعت محور در حال گردش توسط یک دتکتور اپتیکال (Opto_Detector Sensor) اندازهگیری میشود. در طراحی دیسکی که به یک محور در حال گردش اتصال پیدا کرده ( به عنوان مثال میتوانید محوری که به یک موتور یا چرخهای ربات متصل شده را در نظر بگیرید ) چند اسلات شفاف تعبیه شده و هنگامی که دیسک با حرکت محور به گردش درمی آید هر اسلات از جلوی سنسور عبور میکند و متعاقباً سنسور نیز یک سیگنال دیجیتال با سطح یک یا صفر تولید میکند.
این پالسها توسط یک شمارشگر شمرده و سپس بر روی یک صفحه نمایش نشان داده میشوند؛ که بیانگر سرعت دیسک یا تغییر جهت آن میباشند. در ضمن از این نوع سنسور میتوان برای کنترل موقعیت استفاده کرد ( در این حالت باید یکی از اسلات های دیسک به عنوان اسلات مرجع موقعیت در نظر گرفته شود .)
در مقایسه با سیگنال های آنالوگ، سیگنال ها یا مقادیر دیجیتال دقت خیلی بالایی دارند و میتوانند در کلاکهای فوقالعاده سریع نمونه برداری یا اندازهگیری شوند.
دقت سیگنال های دیجیتال متناسب با تعداد بیتهایی است که برای نشان دادن مقدار اندازهگیری شده به کار میروند به عنوان مثال اگر از یک پردازنده ۸ بیتی استفاده کنیم دقت اندازهگیری ۰/۳۹۰٪ ( احتمال یک خطا در ۲۵۶ نمونه) خواهد بود و اگر پردازندهی ما ۱۶ بیتی باشد دقت اندازهگیری به ۰/۰۰۱۵٪ ( احتمال یک خطا در ۶۵۵۳۶) میرسد به عبارتی دیگر ، دقت اندازهگیری ۳۶۰ برابر خواهد شد این میزان دقت حتی در سرعت های فوقالعاده بالا نیز میتواند حفظ شود .
در اکثر مواقع سنسورها (بهخصوص سنسورهای آنالوگ) نیاز به یک منبع تغذیه خارجی و یک تقویت کننده یا فیلتر سیگنال دارند تا قادر باشند یک سیگنال الکتریکی مناسب که قابل اندازهگیری و استفاده است را تولید کنند اگر بخواهیم عمل تقویت کنندگی و فیلترینگ مؤثر را در یک مدار اجماع کنیم، بهترین کار این است که از آپ امپ ها (Operational Amplifiers ) استفاده کنیم.
حالتدهی به سیگنال ها (سیگنال کاندیشنینگ)
همانطور که در بخش آپ امپ ها دیدیم؛ از آپ امپها میتوان برای تقویت سیگنال ها در دو پیکربندی معکوس و غیر معکوس استفاده کرد.
سیگنالهای آنالوگ خیلی کوچک ( در برخی مواقع در حد چند پیکوولت) که توسط سنسورها تولید میشوند میتوانند توسط یک مدار ساده آپامپ چندین بار تقویت شوند تا سیگنال بزرگتری که ولتاژ آن به ۵ ولت میرسد را تولید کنند و این سیگنال میتواند به عنوان سیگنال ورودی یک میکروپراسسور یا یک مبدل آنالوگ به دیجیتال مورد استفاده قرار بگیرد.
درواقع برای اینکه یک سیگنال قابل استفاده باشد باید به وسیله تقویتکنندهای با حداقل بهره ی ولتاژ ۱۰۰۰۰ تقویت شود. در ضمن مدار تقویت کننده باید خطی باشد به عبارتی دیگر میزان افزایش ولتاژ سیگنال خروجی باید با میزان افزایش ولتاژ سیگنال ورودی برابر باشد تا حالت موج ورودی و خروجی یکسان باشد .
تقویت سیگنال بخشی از عملیاتی است که برای تغییر سیگنال انجام میگیرد بنابراین هنگامی که از سنسورهای آنالوگ استفاده میشود باید بهره مدار تقویت کننده ، تطبیق امپدانس ، ایزولاسیون بین سیگنال های ورودی و خروجی یا فیلترینگ فرکانس مد نظر قرار بگیرد و تمام این وظایف به سهولت توسط تقویت کننده عملیاتی قابل دستیابی است .
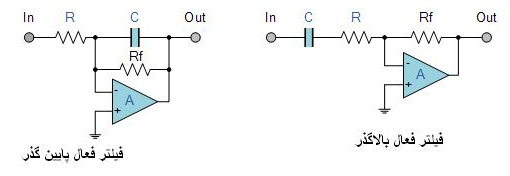
در ضمن برای اندازهگیری تغییرات فیزیکی فوقالعاده کوچک ، تشخیص سیگنال اصلی از نویز کار فوقالعاده دشواری میشود البته میتوان با استفاده از تکنیکهای مخصوص فیلترینگ که در بخش فیلترهای فعال مورد بررسی قرار گرفت از شر سیگنال های مزاحم و نویز خلاص شد.
با استفاده از هر یک از فیلترهای فرکانس پایین، فرکانس بالا یا فیلترهای پهنای باند میتوان بخشهای نویزدار سیگنال را فیلتر نمود و به خروجی دلخواه دست یافت به عنوان مثال، بسیاری از ورودیها مانند سیگنال هایی که از سوییچ ها ، صفحه کلیدها یا تابلوفرمان های دستی دریافت میشوند ، تغییرات فوقالعاده سریعی ندارند بنابراین یک فیلتر که فرکانس های بالا را فیلتر میکند میتواند نویزها را حذف کند به علاوه در زمانی که نویزها بازهی فرکانسی مخصوصی دارند، فیلترهای پهنای باند میتوانند مفید واقع شوند.
فیلترهای رایج با آپ امپ
در برخی مواقع فیلترها قادر نیستند نویزها را به طور کامل حذف کنند در این حالت نیاز به چندین نمونه برداری میباشد و پس از میانگین گرفتن از نمونهها میتوان نرخ سیگنال به نویز را به دست آورد .
در هر صورت تقویت کردن سیگنال و فیلترینگ آن نقش مهمی را در فرایند تجزیه تحلیل سیگنالهایی که از مبدل ها یا سنسورها دریافت میشوند بازی میکند.
در مقالهی بعدی به بررسی سنسورهای موقعیت که مکان یا جابه جایی المانهای فیزیکی را تشخیص میدهند خواهیم پرداخت .



