فهرست مطالب
ژیروسکوپ (Gyroscope) یا به اختصار ژایرو (Gyro) المانی ست که برای اندازهگیری یا حفظ وضعیت (زاویه) یا سرعت زاویهای استفاده میشود. ساختار ژیروسکوپ یک چرخ یا دیسک دوار با محور دوران آزاد است. این محور دوران با چرخاندن حفاظ (قاب) ژیروسکوپ، طبق اصل بقای مومنتوم جهت خود را در فضا حفظ میکند.
در تصویر زیر یک ژیروسکوپ را مشاهده میکنید که در اثر چرخاندن قابهای آن جهت خود را در فضا حفظ میکند (محور قهوهای رنگ متصل به دیسک دوار ثابت میماند).
انواع ژیروسکوپ و کاربردهای آن
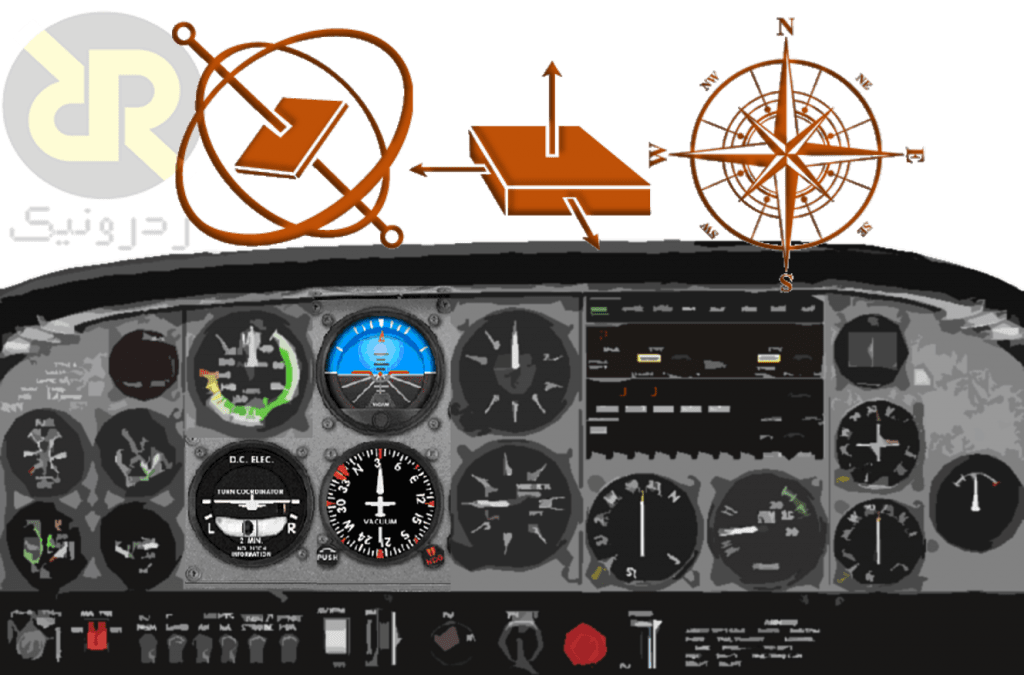
از ژیروسکوپهای مکانیکی ذکر شده در ناوبری هواپیماها استفاده میشود. مطابق اصل اثر ژیروسکوپی، اگر گشتاوری به بدنهی ژیروسکوپ در جهتی غیر از محور دوران آن وارد شود، یک مُمان ژیروسکوپی در جهت حاصلضرب بردار گشتاور اعمال شده در بردار محور دوران به آن وارد میشود. این گشتاور ژیروسکوپی منجر به چرخش ژیروسکوپ در جهت گشتاور میشود. در تصویر زیر طرز کار یکی از ابزار ناوبری هواپیما که طبق اصل اثر ژیروسکوپی، زاویهی پیچ هواپیما را محاسبه میکند، نشان داده شده است.
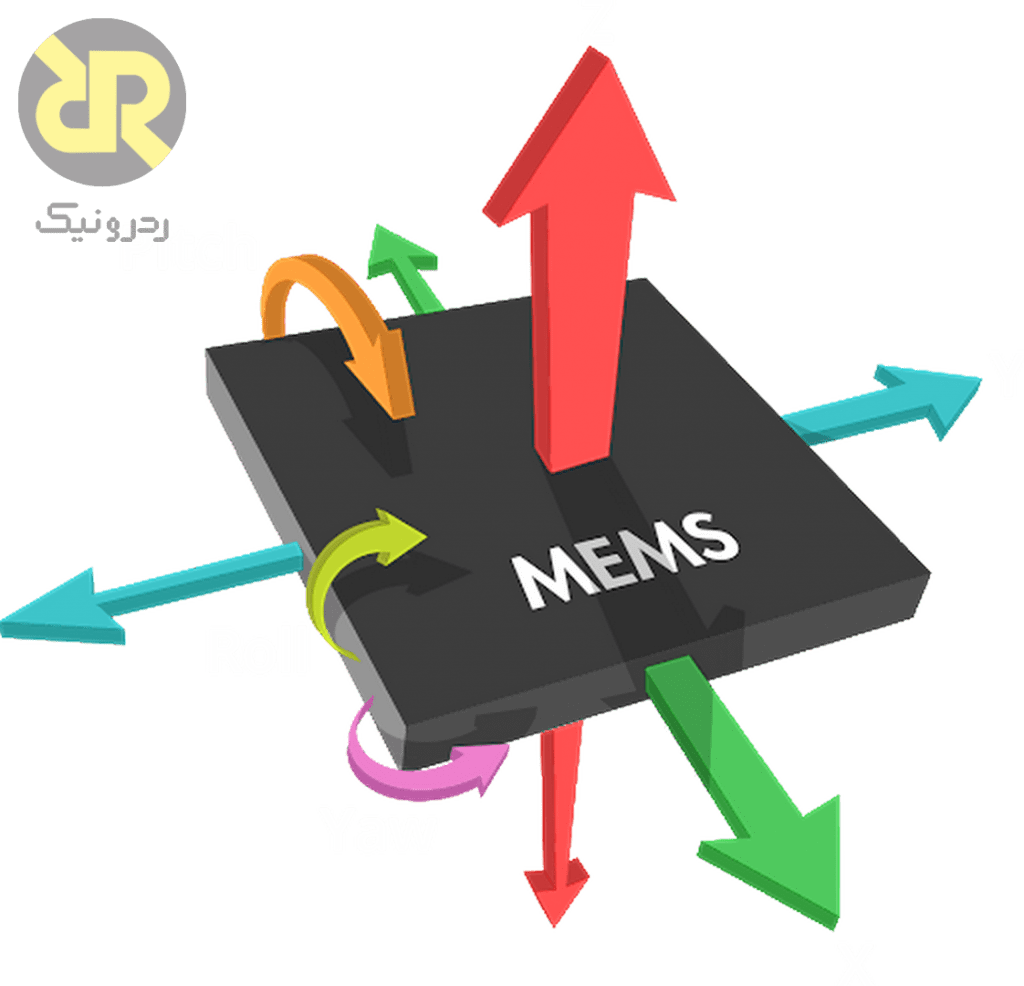
امروزه ژیروسکوپهای مختلفی که مطابق با اصول دیگری کار میکنند در ناوبری استفاده میشود. به عنوان مثال ژیروسکوپهای میکرو الکترومکانیکی (MEMS: Micro-Electro-Mechanical Systems) که در تمامی تلفنهای همراه هوشمند وجود دارد. یا ژیروسکوپهای رینگ لیزری (RLG: Ring Laser Gyroscope) و فیبر نوری (FOG: Fiber Optic Gyroscope) که به مراتب نسبت به نوع MEMS دقیقتر و پرهزینهتر هستند. همچنین ژیروسکوپهای تشدید کنندهی نیم کره (HRG: Hemispherical Resonator Gyroscope) و کوانتومی نیز از انواع جدید و خیلی دقیق این ابزار محسوب میشوند.
ژیروسکوپهای ذکر شده در بند قبل، در کنار بخش مکانیکی که حسگر آن را تشکیل میدهد، یک بخش الکترونیکی هم دارند که خروجی زاویه یا سرعت زاویهای را در قالب سیگنال دیجیتال یا آنالوگ میدهد.
از ژیروسکوپ در سامانههای ناوبری اینرسی (INS: Inertial Navigation System) و سامانهی مرجع سمت و تراز (AHRS: Attitude & Heading Reference System) به عنوان بخش اصلی این دو سامانه استفاده میشود. این دو سامانه در ناوبری زمینی، هوایی، دریایی و زیر دریایی کاربردهای وسیعی دارند. همچنین از این دستگاه در ژیروتهودولیت (وسیلهای که با استفاده از آن جهت ساخت تونل یا معدن مشخص میشود)، پایدار کنندهی دوربین (گیمبال)، قطبنماهای پیشرفته (Gyrocompass)، تلفنهای همراه و … استفاده میشود.
کاربرد ژیروسکوپ در ناوبری
راهنمای انتخاب ژیروسکوپ
در هنگام خرید یک حسگر ژایرو لازم است تا پارامترهای اساسی آن را بررسی کرده و با توجه به نیاز خود آن را خریداری نمائید. در ادامه بصورت مختصر این پارامترهای اساسی توضیح داده شدهاند.
نوع خروجی (دیجیتال یا آنالوگ)
در صورتی که ژیروسکوپ کاربردی جدی و مهم در پروژهی شما دارد، پیشنهاد میشود محصولی خریداری نمائید که خروجی آن آنالوگ باشد. در این حالت با استفاده از یک مبدل آنالوگ به دیجیتال با نویز کم و رزولوشن بالا میتوانید خروجی دیجیتال مناسبی از حسگر دریافت کنید.
با این حال در اکثر کاربردهای عادی و حتی کاربردهای ناوبری مانند ناوبری رباتهای پرندهی غیر نظامی میتوانید از حسگرهای ژایرو با خروجی دیجیتال استفاده کنید.
نرخ آپدیت یا فرکانس داده
فرکانس خروجی دادهها نیز از جمله مواردیست که باید مورد توجه قرار گیرد. طبیعتا برای دستیابی به حسگری با فرکانس بالا باید هزینهی بیشتری پرداخت کنید.
بازهی دمایی عملکردی
ژیروسکوپها با توجه به مواد و ابزار استفاده شده در آنها در بازهی دمایی مشخصی عملکرد مناسب دارند که با توجه به نیاز خود باید این موضوع را مورد نظر داشته باشید.
حساسیت ضرایب کالیبراسیون نسبت به دما
مانند اکثر حسگرها، خروجی ژیروسکوپ نیز قبل از استفاده باید کالیبره شود. ضریب Scale Factor در ژیروسکوپها از جمله مواردیست که نسبت به تغییر دما حساسیت دارد. میزان این حساسیت با توجه به بازهی دمایی محیط عملکردی آن نکتهایست که در انتخاب محصول باید مورد توجه قرار گیرد.
ناپایداری پیش قدر (بایاس)
همانطورکه در مورد قبلی ذکر شد خروجی این سنسور قبل از استفاده، نیاز به فرایند کالیبراسیون دارد. بایاس یا آفست در کنار ضریب Scale Factor از پارامترهای اصلی کالیبراسیون است. میدانیم که در حالت سکون خروجی سنسور باید صفر باشد اما به دلیل وجود بایاس، این مقدار صفر نیست (از اثر چرخشهای زمین و منظومه شمسی و کهکشان و … روی ژیروسکوپ صرف نظر کنید!).
نکتهای که در اکثر ژیروسکوپها علی الخصوص در نوع MEMS وجود دارد این است که این مقدار بایاس با گذر زمان تغییر میکند. تا جایی که در برخی از سنسورها پس از کالیبراسیون اولیه و حذف آفست آن، با انتگرالگیری از دادههای سرعت زاویهای خروجی یک حسگر کاملا ساکن در حوزهی زمان، پس از گذشت یک ساعت 20 درجه خطا به وجود میآید. بنابراین پایین بودن مقدار ناپایداری بایاس (Bias Instability) از مزیتهای یک حسگر است.
در تصویر زیر مقایسهای بین انواع مختلف ژیروسکوپها با در نظر گرفتن ناپایداری پیشقدر و Scale Factor آورده شده است.

رزولوشن داده
با توجه به مبدل آنالوگ به دیجیتال استفاده شده در سنسورهای ژیروسکوپ دیجیتال، خروجی این حسگر در قالب تعداد بایت مشخصی ارائه میشود. بیشتر بودن تعداد بایتها به معنای رزولوشن بهتر سنسور است.
بازهی خروجی
با توجه به مأموریتهایی که جسم حامل ژیروسکوپ دارد، باید بازهی خروجی مطلوب حسگر در نظر گرفته شود. به عنوان مثال اگر سنسور در یک زیردریایی استفاده میشود، حسگری که خروجی سرعت زاویهای بین -125 dps و +125 dps دارد مناسب است و اگر محل استفاده از حسگر روی یک پرنده با مانور پذیری بالاست بازهی -1000 dps تا +1000 dps مطلوب است.
لازم به ذکر است که اکثر حسگرهای دیجیتال قابلیت تنظیم عملکرد در بازههای مختلف را دارند. اما طبیعتا با تنظیم یک حسگر روی بازههای بالاتر، با توجه به اینکه تعداد بایتهای دادهی خروجی ثابت است، رزولوشن سرعت زاویهای خروجی کاهش مییابد.
نویز خروجی
حسگرهای ژیروسکوپ به دلیل نوع ساختار آنها و همچنین استفاده از مبدل آنالوگ به دیجیتال (در حسگرهای دیجیتال) مقداری نویز روی خروجی دارند. چگالی نویز از جمله پارامترهایست که در دیتاشیتهای محصولات قابل مشاهده است و با توجه به دقت مورد نیاز باید آن را در نظر داشته باشید.
تعداد محورها
ژایروها در قالب حسگرهای تک محوره، دو محوره و سه محوره در بازار موجود میباشند. در کاربریهای ناوبری عمدتا از ژیروسکوپهای سه محوره (یا سه ژیروسکوپ تک محوره) استفاده میشود. اما در صورتی که در کاربری مورد نظرتان تنها در یک جهت دوران دارید، میتوانید از انواع تک محوره استفاده کنید.
میزان متعامد بودن
در ژیروسکوپهای سه محوره خطایی تحت عنوان Non-Orthogonality یا Misalignment وجود دارد که در اثر نصب غیر دقیق محورهای سه ژیروسکوپ نسبت به یکدیگر بوجود میآید. در صورتی که محورهای سه حسگر به جای 90 درجه اختلاف زاویه، 89 درجه اختلاف داشته باشند، با چرخاندن حسگر حول یکی از محورهای آن، روی سایر محورها نیز عددی به عنوان خروجی داده میشود. معمولا در دیتاشیت محصولات میزان این خطای نصب بصورت دقیق قابل جستجو نیست و اگر این مورد برای کاربری شما مورد اهمیت است باید با دستگاههای کالیبراسیون پیشرفته آن را بررسی کنید.
برای مشاهده و خرید محصولات ژیروسکوپ کلیک کنید