موتورهای DC بدون جاروبک
این موتورها یکی از انواع موتورهایی است که به سرعت محبوبیت پیدا کرد. این موتورها در صنایع مختلفی از جمله لوازم خانگی، خودروسازی، فضایی، کالاهای مصرفی، پزشکی و تجهیزات اتوماسیون صنعتی و ابزار دقیق کاربرد دارند. همان طور که از اسم آنها پیداست، در این موتورها از جاروبک استفاده نمیشود و عمل کموتاسیون به صورت الکترونیکی صورت میگیرد. موتورهای براشلس مزایای زیادی نسبت به موتورهای DC و القایی دارند. از جمله:
- مشخصه سرعت به گشتاور بهتر
- پاسخ پویای بالا
- بازدهی بالا
- عمر زیاد
- عملکرد بدون نویز
- محدوده سرعت بالاتر
همچنین نسبت گشتاور تحویلی به سایز موتور، بالاست و باعث میشود در کاربردهایی که محدودیت فضا و وزن وجود دارد مناسب باشد.
ساختار و عملکرد موتور BLDC
موتورهای بدون جاروبک نوعی از موتورهای سنکرون هستند. به عبارت دیگر، میدان مغناطیسی استاتور و روتور آنها هم فرکانس است. برخلاف موتورهای القایی معمولی، در موتورهای بدون جاروبک لغزش[1] وجود ندارد.
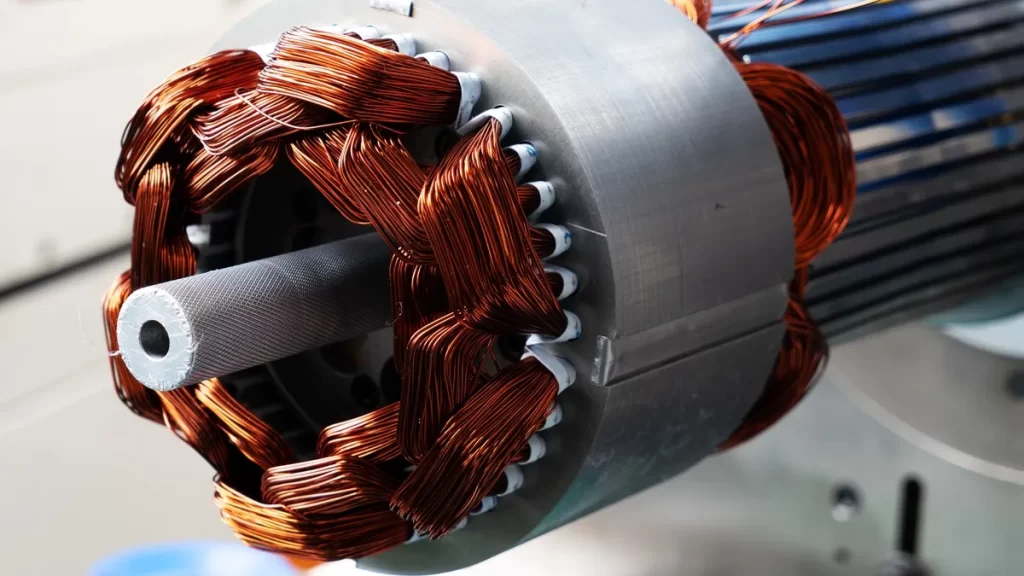
BLDC موتورها، به صورت تک فاز، دو فاز و سه فاز وجود دارند. بسته به نوعشان، استاتور به همان اندازه سیمپیچ دارد. فارغ از اینها، موتورهای سه فاز استفاده عامیانهتری دارند. موتورهای بدون جاروبک، برخلاف موتورهای جاروبک دار DC، یک آهنربای دائم، چسبیده به روتور دارند. معمولا چهار آهنربا در محیط دور آن وجود دارد. استاتور از آهنرباهای الکترومغناطیسی تشکیل شدهاست( معمولا چهار عدد که در زاویههای 90 درجه نسبت به یکدیگر نصب شدهاند). مزیت عمده این موتورها این است که روتور فقط شامل یک آهنربای دائم است و هیچ گونه سیمپیچی ندارد. در نتیجه نیازی به جاروبک و کموتاتور ندارد. به همین دلیل، این موتورها کارکرد بی سرو صدایی دارند و در مصرف انرژی بهینهتر هستند.

شکل 1: استاتور یک موتور BLDC
هر دنباله از کموتاسیون، سیمپیچ اول را تغذیه مثبت میدهد( جریان به سیمپیچ وارد میشود)، به سیمپیچ دوم تغذیه منفی میدهد( جریان از سیمپیچ خارج میشود) و سیمپیچ سوم تغذیه نمیشود. به خاطر تقابل میدان مغناطیسی سیمپیچهای استاتور با آهنربای روتور، گشتاوری ایجاد شده و سبب حرکت روتور میشود.

شکل 2: نحوه تغذیه استاتور موتور BLDC
در انتخاب BLDC موتور برای کاربرد مد نظر، دو فاکتور باید مد نظر قرار گیرد؛ ثابت ولتاژ و رانش[2].
ثابت ولتاژ بیانگر تعداد دور در یک دقیقه به ازای ولتاژ یک ولت است. رانش یا تراست، نیرویی واکنشی است، که جسم را در جهت مخالف به حرکت در میآورد، هنگامی که یک سامانه جرمی از یک سو رها ساخته یا به بیرون فشرده میشود.
[1] اختلاف سرعت بین سرعت میدان دوار و سرعت حرکت روتور در اصطلاح لغزش نامیده میشود.
[2] thrust