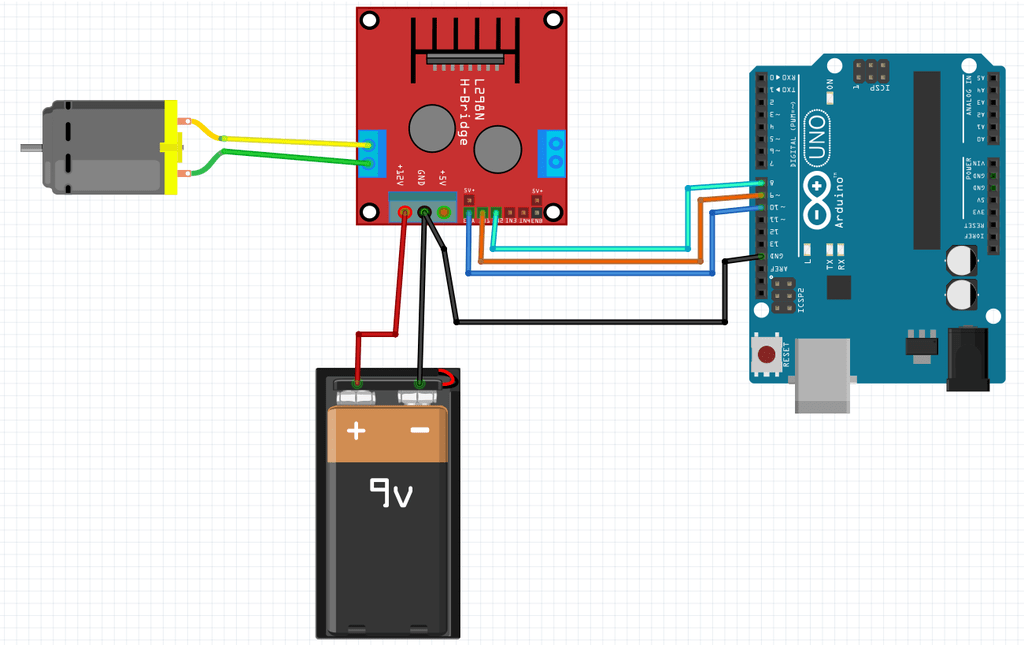
در این آموزش برای راهاندازی موتور از روش ارائه شده در جدول دوم در دانشنامهی مدار L298 استفاده خواهد شد. بنابراین پین Enable درایور باید سیگنال PWM دریافت کند، بنابراین در صورت تمایل به استفاده از پینهایی غیر از موارد مشخص شده در شکل بالا حتما به این نکته توجه داشته باشید. زیرا تنها پینهای خاصی از برد آردوینو امکان تولید سیگنال PWM را دارند (کنار پینها علامت ~ قرار دارد. همچنین میتوانید پایهی Enable را به یکی از پایههای آنالوگ آردوینو وصل کنید).
مراحل راهاندازی موتور دی سی با L298
کد نویسی مورد نیاز برای راهاندازی این مجموعه بسیار آسان است. کافیست یکی از پایههای متصل به In1 یا In2 را در حالت High و دیگری را در حالت Low قرار داده و به پایهی متصل به En سیگنال PWM با Duty Cycle دلخواه اعمال کنید. توجه داشته باشید که عدد Duty Cycle باید مقدار بین 0 و 255 باشد. ( صفر معادل صفر درصد Duty Cycle و 255 معادل 100 درصد Duty Cycle است ) همچنین توجه داشته باشید که برای راهاندازی موتورهای DC مقدار مینیممی برای Duty Cycle وجود دارد ( حدود 40 درصد ) که در واقع معادل ولتاژ مینیمم جهت راه افتادن موتور است.
کد مورد نیاز برای این پروژه در پایین قرار داده شده است. برای تغییر جهت چرخش موتور میتوانید پایهی متصل به In1 را Low و In2 را High کنید ( پایههای 8 و 9 روی آردوینو ).
کد راه اندازی موتور دی سی با L298
int ENA=10;
int IN1=9;
int IN2=8;
void setup() {
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
}
void loop() {
analogWrite(ENA,255);
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
delay(1000);
}