فهرست مطالب
چرا درایور موتور؟
یک موتور DC ساده با ولتاژ نامی 6 ولت را در نظر بگیرید. جهت راهاندازی این موتور میتوانید دو سر موتور را به 4 باتری 1.5 ولتی وصل کنید. در صورتی که قصد کاهش دور موتور را داشته باشید، میتوانید به جای استفاده از 4 باتری، از 2 باتری استفاده کنید و اگر بخواهید جهت چرخش را عوض کنید میتوانید دو سیم مثبت و منفی باتری را برعکس حالت قبلی به موتور متصل نمایید. موارد ذکر شده راهاندازی و کنترل موتور به شیوهی دستی هستند. در صورتی که قصد راهاندازی و کنترل مشه منظور تغییر سرعت استفاده کنیم. علاوه بر اینکه استفاده از مقاومت متغیر به منظور تغییر ولتاژ، عملی غیر هشمندانه است (زیرا بخش زیادی از توان منبع تغذیه در مقاومت اتلاف میشود)، روال راهاندازی ذکر شده تنها کنترل و اعمال فرمان را به صورت دستی و غیر اتوماتیک امکان پذیر میکند. به منظور راهاندازی و کنترل کامل و صحیح موتور با استفاده از میکروکنترلر یا آی سیهایی نظیر 555 باید از مدارهای درایور موتور استفاده کرد. در این مقاله به صورت کلی با مفهوم درایور موتور و همچنین یکی از معروفترین مدارهای درایور موتور که در اکثر ماژولهای درایور استفاده شده است میپردازیم.
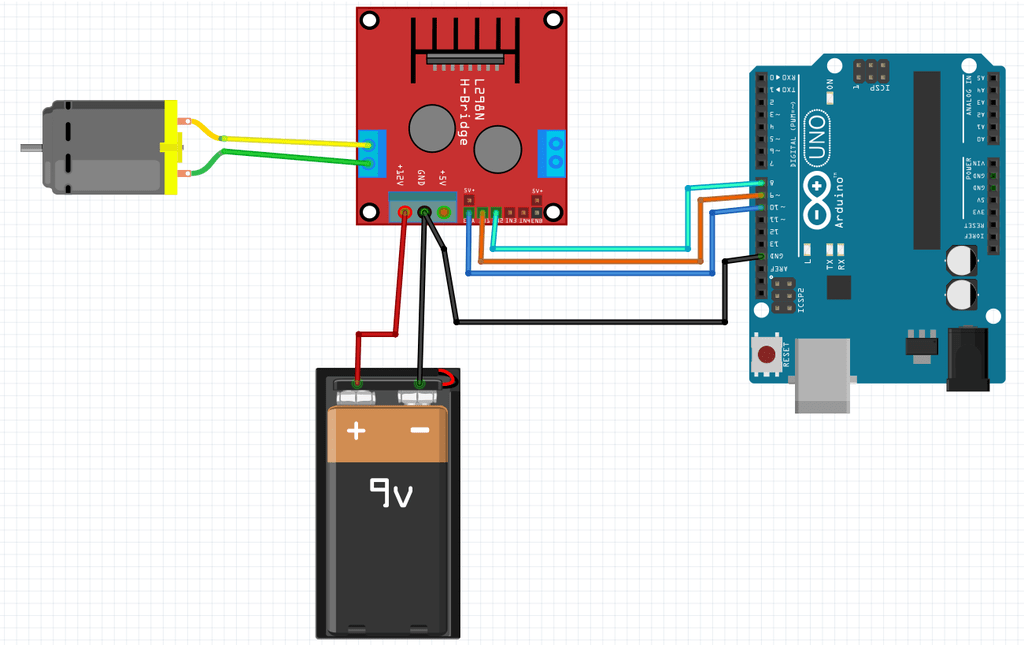
با توجه به اینکه میکروکنترلرهای استاندارد قادر به ارائهی سیگنال خروجی در سطح 3.3 یا 5 ولت هستند و ماکزیمم جریان قابل تحمل در آنها عمدتا کمتر از 200 میلیآمپر است، راهاندازی اکثر موتورهای DC، AC، استپر و … با میکروکنترلر به صورت مستقیم امکانپذیر نیست و برای کنترل موتورها با استفاده از چنین میکروکنترلرهایی باید از ماژولهای درایور استفاده کرد. این ماژولها دارای دو بخش ولتاژ بالا و ولتاژ پایین هستند. فرامین میکروکنترلر از قسمت ولتاژ پایین اعمال میشود و سمت دیگر درایور که با ولتاژ و جریان بالاتری کار میکند با منبع تغذیه و موتور ارتباط دارد. به این ترتیب ماژول درایور با دریافت فرامین از میکروکنترلر، ولتاژ مناسب را در جهت مناسب به موتور اعمال میکند.
چهار فاز عملکردی موتور
یک موتور در حالت روشن در یکی از چهار فاز عملکردی که در شکل پایین نمایش داده شده است قرار دارد.
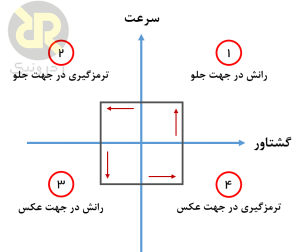
هر یک از چهار موقعیت مشخص شده درشکل بالا یک ربع عملکردی موتور را نشان میدهد. یک مدار درایور خوب باید توانایی رسیدگی کردن به هر یک از این چهار ربع را داشته باشد. مدار H-Bridge از جمله مدارهاییست که این امکان را به کاربر میدهد که موتور در هر یک از این چهار ربع به درستی کار کند.
مدار درایور موتور H-Bridge
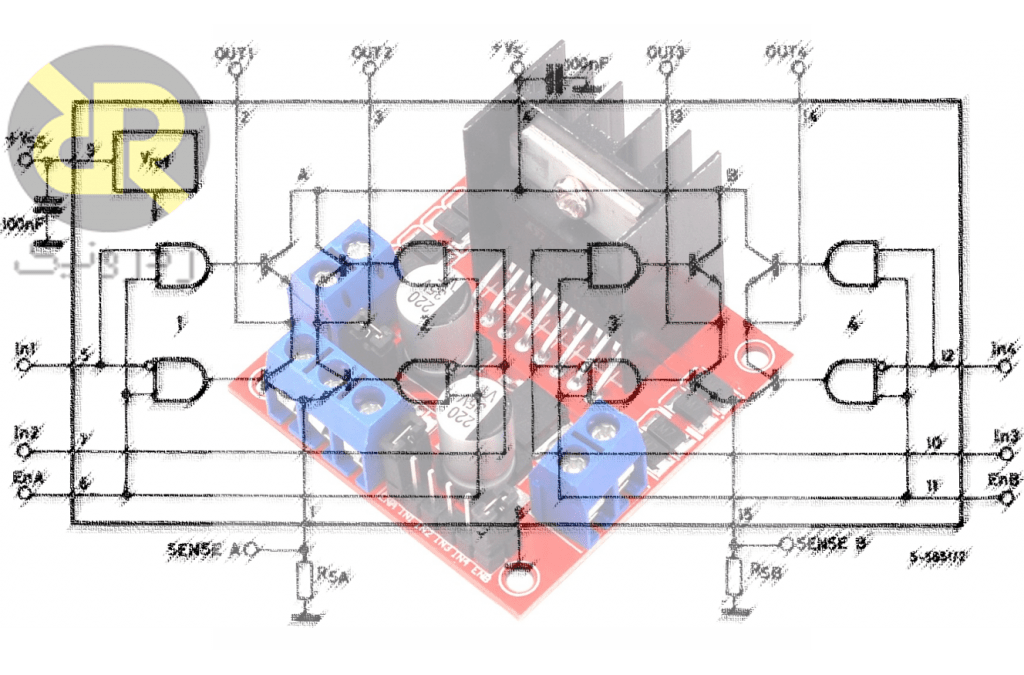
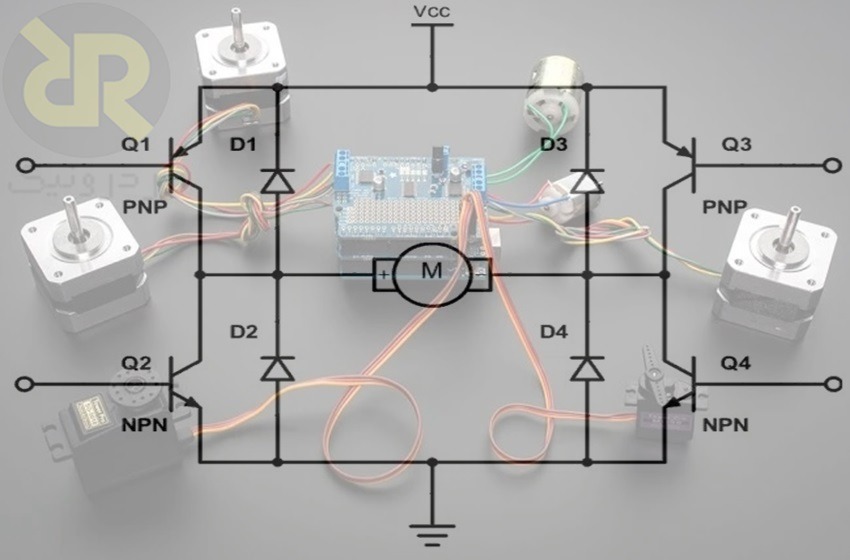
مدار H-Bridge از پرکاربردترین مدارهای قابل استفاده برای درایو کردن انواع موتورهاست. به صورت کلی و در نمونههای ساده از این مدار، چهار المان سوئیچ اجزای اصلی آن هستند. سوئیچها معمولا ترانزیستورهای FET یا در کاربردهای ولتاژ بالا ترانزیستورهای IGBT هستند. در شکل زیر شمای کلی یک مدار H-bridge نشان داده شده است.

در شکل بالا المانهای Q1 تا Q4 ترانزیستور هستند و در محل المان M یک سیمپیچ موتور (یک موتور DC، یک فاز موتور استپر یا …) قرار میگیرد.
نحوه عملکرد درایور موتور H-Bridge در ربع اول
در حالتی که ترانزیستورهای Q1 و Q4 در مدار شکل قبلی روشن باشند مسیر عبور جریان از موتور به شکل زیر خواهد بود.
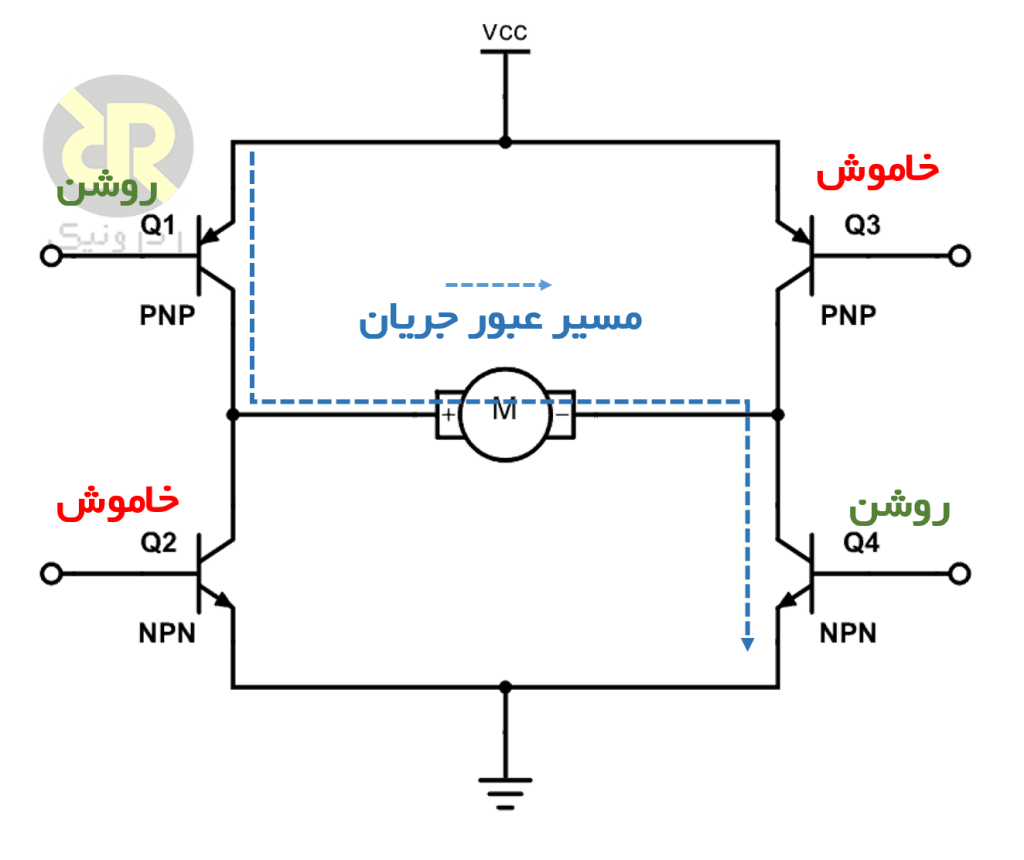
به این ترتیب با اعمال اندک ولتاژی به پایهی بیس ترانزیستورهای Q1 و Q4 با یک میکروکنترلر، موتور در ربع اول (رانش در جهت جلو) راهاندازی میشود. واضح است که برای راهاندازی موتور در ربع سوم (رانش در جهت عکس) باید ترانزیستورهای Q1 و Q4 خاموش باشند و Q2 و Q3 روشن باشند. در این حالت جهت جریان عبوری از موتور عکس حالتی که در شکل بالا نشان داده شده خواهد بود.
در صورتی که قصد کنترل سرعت/گشتاور موتور را داشته باشیم باید ولتاژ اعمالی به موتور قابل تغییر باشد. برای این منظور میتوان ترانزیستور Q4 را همیشه روشن گذاشت و ترانزیستور Q1 را به Duty Cycle دلخواهی با یک سیگنال PWM روشن و خاموش کرد (ترانزیستورهای Q2 و Q3 خاموش هستند). در این حالت ولتاژ میانگین اعمال شده به موتور برابر با حاصلضرب Duty Cycle در VCC خواهد شد. اما استفاده از مدار فوق برای راهاندازی موتور با PWM ایرادی دارد که در ادامه به توضیح آن پرداخته میشود.
به صورت کلی یک موتور (یک سیمپیچ) با یک مقاومت، یک سلف و یک منبع ولتاژ BEMF (Back EMF) به صورت سری مدل میشود. میدانیم که از خواص اصلی سلف تمایل به حفظ جریان است. بنابراین زمانیکه جریان عبوری حاصل از منبع تغذیه از یک موتور قطع میشود، سلف جریانی هم جهت با جریان قطع شده تولید میکند. در مدار فوق وقتی ولتاژ VCC بصورت PWM به موتور اعمال میشود در حالتیکه موج PWM در حالت خاموش قرار دارد، موتور (سلف) تمایل به ایجاد جریانی همجهت با جریان قطع شده دارد. اما مسیری بین دو قطب منبع تغذیه برای عبور جریان وجود ندارد. با توجه به این موضوع که اختلاف ولتاژ دو طرف سلف رابطهی مستقیم با تغییرات (مشتق) جریان عبوری از آن دارد و در لحظهی قطع شدن جریان، شدت این تغییرات بسیار زیاد است، در دو طرف سلف ولتاژ بالایی تولید میشود که این مسئله در کنار عدم وجود مسیری برای عبور جریان، امکان آسیب رساندن به ترانزیستورها را بوجود میآورد. به همین دلیل در مدارهای H Bridge از دیودهای فلای بک (Flyback یا Freewheeling) استفاده میشود. در شکل زیر چینش دیودها و مسیر جریان برای حالتی که موتور در ربع اول با سیگنال PWM راهاندازی میشود را مشاهده میکنید.
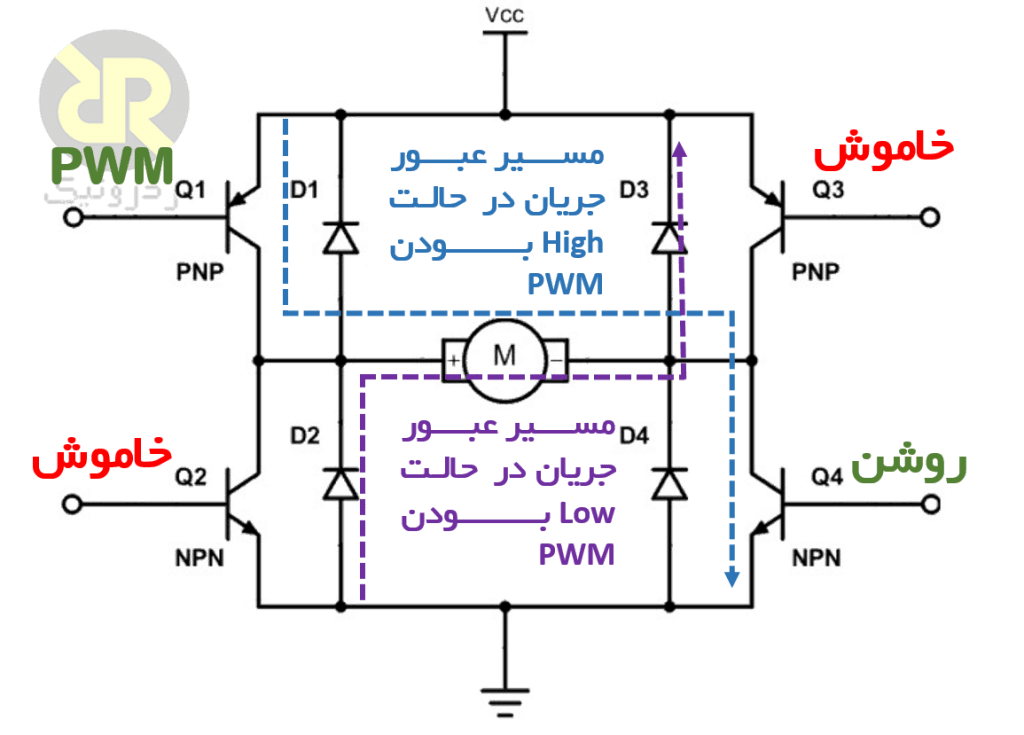
همانطورکه از خط چین بنفش در شکل بالا مشخص است، در زمان Low بودن سیگنال PWM منبع تغذیه شارژ میشود (در صورتیکه قابلیت شارژ شدن را داشته باشد).
نحوه عملکرد درایور موتور H-Bridge در ربع دوم
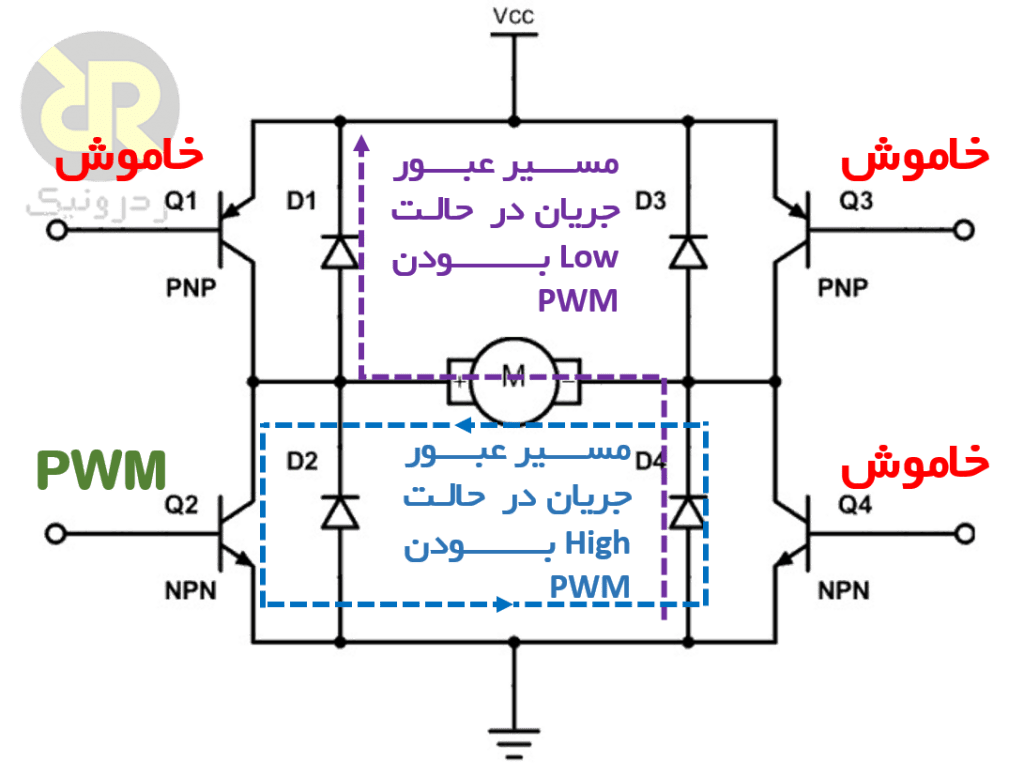
برای ترمزگیری موتور در جهت جلو کافیست تنها ترانزیستور Q2 با موج PWM روشن و خاموش شود و سایر ترانزیستورها خاموش باشند. در حالتی که ترانزیستور Q2 روشن است، دیود D4 در حالت تغذیه مستقیم قرار میگیرد و جریان به صورت پادساعتگرد از سمت پایین مدار عبور میکند. خاموش شدن Q2 جریان از طریق دیودهای D4 و D1 منبع تغذیه را شارژ میکند.
نحوه عملکرد درایور موتور H-Bridge در ربع سوم و چهارم
عملکرد ربع سوم دقیقا مانند ربع اول است با این تفاوت که جهت عبور جریان از موتور باید برعکس شود. در این حالت کافیست ترانزیستور Q3 با PWM راهاندازی شود و ترانزیستور Q2 همواره روشن باشد و دو ترانزیستور دیگر خاموش باشند.
عملکرد ربع چهارم نیز مانند ربع دوم است و کافیست ترانزیستور Q4 با PWM روشن و خاموش شود و سایر ترانزیستورها خاموش باشند.
جمع بندی و نکات اصلی
در این مقاله مدار H-Bridge به عنوان یک مدار درایور موتور مناسب معرفی شد. لازم به ذکر است که این مدار علاوه بر روش راهاندازی ذکر شده، توانایی راهاندازی موتور با الگوریتمهای متفاوت دیگری را نیز دارد که در آنها نحوه برخورد با ترانزیستورها اندکی متفاوت است. در ادامه این بخش نکات اصلی ذکر شده در این مقاله به صورت مختصر یادآوری و جمع بندی میشود.
- کنترل کامل و صحیح موتور باید به گونهای باشد که با کمترین اتلاف توان امکان تغییر جهت و تغییر ولتاژ اعمالی به موتور وجود داشته باشد.
- به دلیل عدم پشتیبانی اکثر میکروکنترلرها از جریان و ولتاژهای بالا باید از مداری واسط که از طریق ولتاژ و جریان پایین با میکرو کنترلر در ارتباط است و از سوی دیگر با ولتاژ و جریان بالای منبع تغذیه و موتور درگیر است استفاده شود.
- یک درایور موتور مناسب باید توانایی راهاندازی موتور در چهار ربع عملکردی را داشته باشد.
- یک درایور موتور مناسب باید توانایی تعامل با رفتار سلف سیمپیچهای موتور را داشته باشد.
- مدار H Bridge از جمله مدارهای درایور موتور مناسب است که قابلیت راهاندازی موتور در هر چهار ربع را دارد و در اکثر درایور موتورهای شناخته شده استفاده میشود.
برای مشاهده محصولات و خرید درایور موتور کلیک کنید.