switch (user)
{
case 0 :
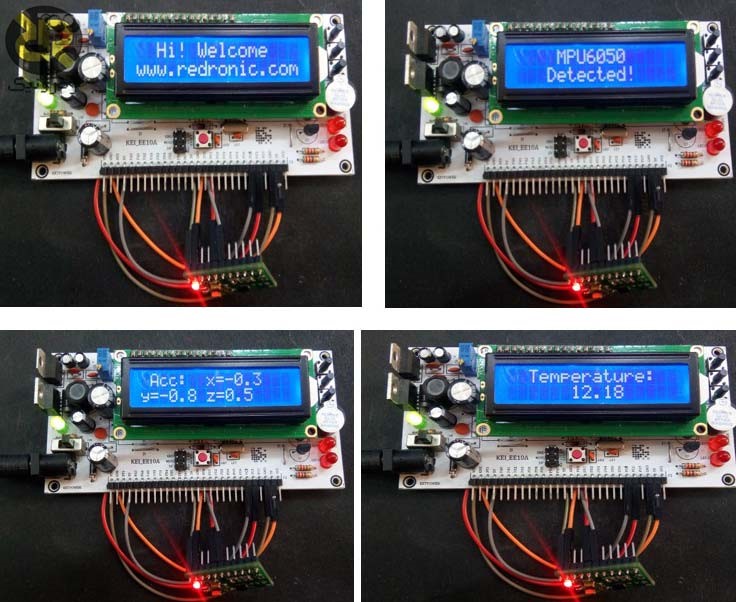
lcd_gotoxy(0,0); //line 0, char 0
lcd_puts(" Temperature: ");
lcd_gotoxy(6,1); //line 1, char 6
ftoa(temperature_c,2,lcd_data); // Convert integer to string
lcd_puts(lcd_data);
break;
case 1 :
lcd_gotoxy(0,0); //line 1, char 0
lcd_puts(" Acc: ");
lcd_puts("x=");
ftoa(acl_x,1,lcd_data); // Convert integer to string
lcd_puts(lcd_data);
lcd_gotoxy(0,1); //line 2, char 0
lcd_puts("y=");
ftoa(acl_y,1,lcd_data); // Convert integer to string
lcd_puts(lcd_data);
lcd_gotoxy(7,1);
lcd_puts("z=");
ftoa(acl_z,1,lcd_data); // Convert integer to string
lcd_puts(lcd_data);
break;
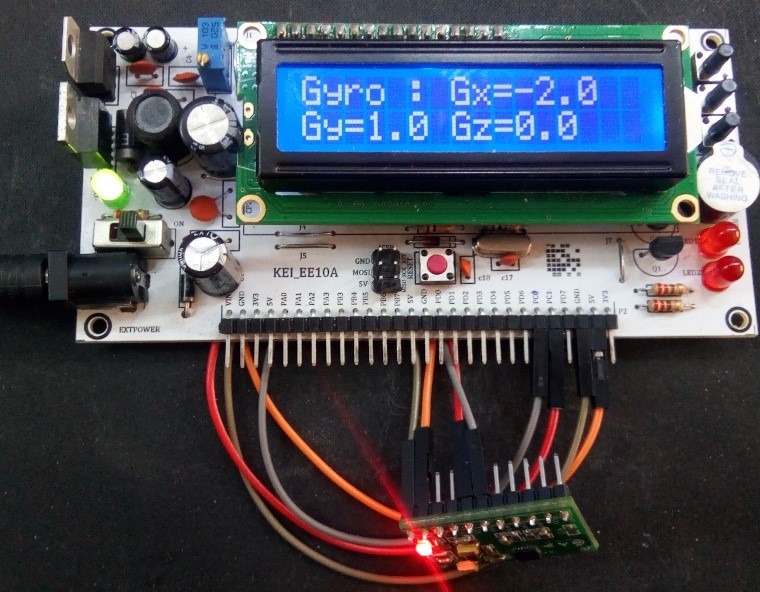
case 2 :
lcd_gotoxy(0,0); //line 1, char 0
lcd_puts("Gyro : ");
lcd_puts("Gx=");
ftoa(gyro_x,1,lcd_data); // Convert integer to string
lcd_puts(lcd_data);
lcd_gotoxy(0,1); //line 1, char 0
lcd_puts("Gy=");
ftoa(gyro_y,1,lcd_data); // Convert integer to string
lcd_puts(lcd_data);
lcd_gotoxy(7,1);
lcd_puts("Gz=");
ftoa(gyro_z,1,lcd_data); // Convert integer to string
lcd_puts(lcd_data);
break;
}