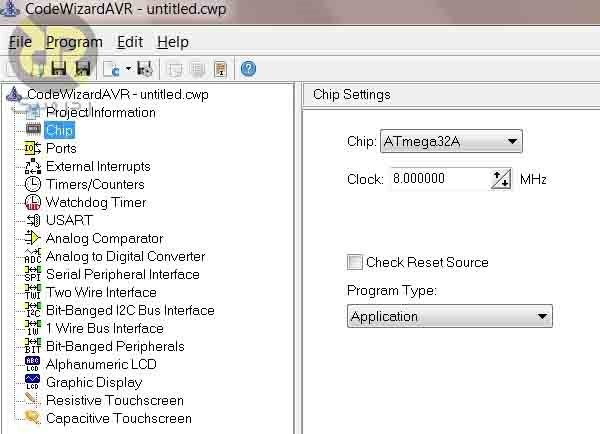
#include <mega32a.h>
// SPI functions
#include <spi.h>
// Alphanumeric LCD functions
#include <alcd.h>
// Declare your global variables here
// Standard Input/Output functions
#include <stdio.h>
#include <stdint.h>
#include <delay.h>
#include <stdlib.h>
#include <string.h>
#include <math.h>
void uart_print(char*);
void uart_putchar(char);
uint8_t * spi_read(uint8_t,uint8_t) ;
uint8_t read_data[10];
void main(void)
{
// Declare your local variables here
uint8_t *address,checksum,gyro_ch[10],temp_ch[10];
int gyro,temperature;
float temp;
// Input/Output Ports initialization
// Port A initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRA=(0<<DDA7) | (0<<DDA6) | (0<<DDA5) | (0<<DDA4) | (0<<DDA3) | (0<<DDA2) | (0<<DDA1) | (0<<DDA0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTA=(0<<PORTA7) | (0<<PORTA6) | (0<<PORTA5) | (0<<PORTA4) | (0<<PORTA3) | (0<<PORTA2) | (0<<PORTA1) | (0<<PORTA0);
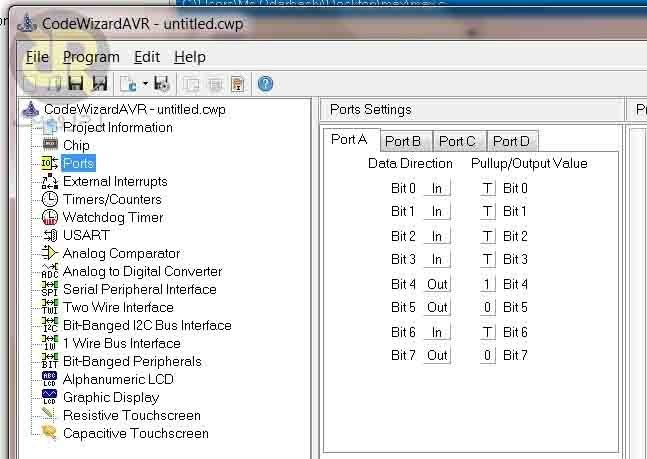
// Port B initialization
// Function: Bit7=Out Bit6=In Bit5=Out Bit4=Out Bit3=In Bit2=In Bit1=In Bit0=In
DDRB=(1<<DDB7) | (0<<DDB6) | (1<<DDB5) | (1<<DDB4) | (0<<DDB3) | (0<<DDB2) | (0<<DDB1) | (0<<DDB0);
// State: Bit7=0 Bit6=T Bit5=0 Bit4=0 Bit3=T Bit2=T Bit1=T Bit0=T
PORTB=(0<<PORTB7) | (0<<PORTB6) | (0<<PORTB5) | (0<<PORTB4) | (0<<PORTB3) | (0<<PORTB2) | (0<<PORTB1) | (0<<PORTB0);
// Port C initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRC=(0<<DDC7) | (0<<DDC6) | (0<<DDC5) | (0<<DDC4) | (0<<DDC3) | (0<<DDC2) | (0<<DDC1) | (0<<DDC0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTC=(0<<PORTC7) | (0<<PORTC6) | (0<<PORTC5) | (0<<PORTC4) | (0<<PORTC3) | (0<<PORTC2) | (0<<PORTC1) | (0<<PORTC0);
// Port D initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRD=(0<<DDD7) | (0<<DDD6) | (0<<DDD5) | (0<<DDD4) | (0<<DDD3) | (0<<DDD2) | (0<<DDD1) | (0<<DDD0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTD=(0<<PORTD7) | (0<<PORTD6) | (0<<PORTD5) | (0<<PORTD4) | (0<<PORTD3) | (0<<PORTD2) | (0<<PORTD1) | (0<<PORTD0);
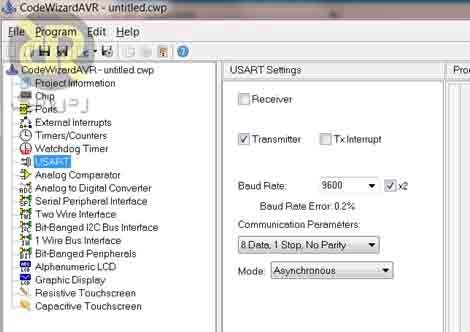
// USART initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity
// USART Receiver: On
// USART Transmitter: On
// USART Mode: Asynchronous
// USART Baud Rate: 9600
UCSRA=(0<<RXC) | (0<<TXC) | (0<<UDRE) | (0<<FE) | (0<<DOR) | (0<<UPE) | (0<<U2X) | (0<<MPCM);
UCSRB=(0<<RXCIE) | (0<<TXCIE) | (0<<UDRIE) | (1<<RXEN) | (1<<TXEN) | (0<<UCSZ2) | (0<<RXB8) | (0<<TXB8);
UCSRC=(1<<URSEL) | (0<<UMSEL) | (0<<UPM1) | (0<<UPM0) | (0<<USBS) | (1<<UCSZ1) | (1<<UCSZ0) | (0<<UCPOL);
UBRRH=0x00;
UBRRL=0x33;
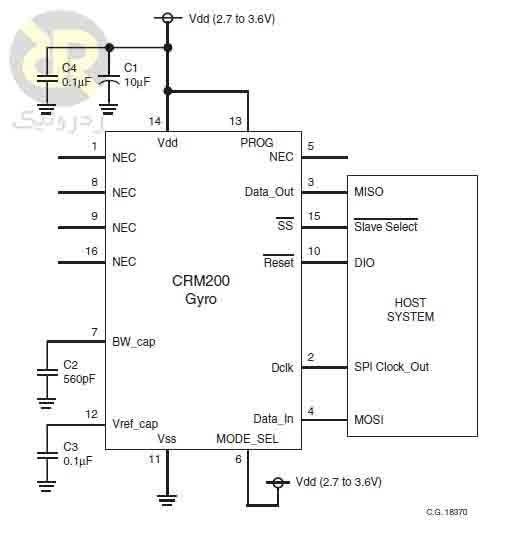
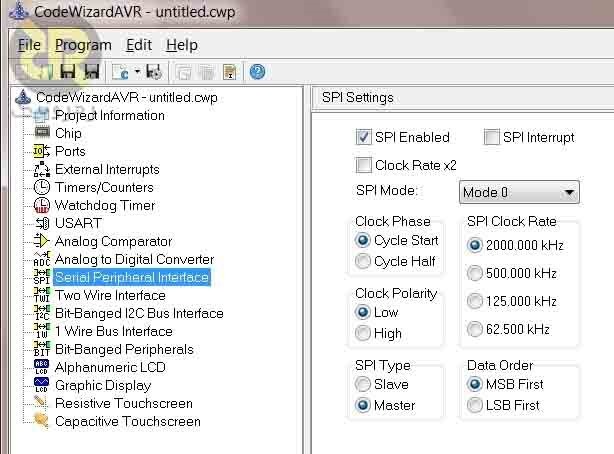
// SPI initialization
// SPI Type: Master
// SPI Clock Rate: 500.000 kHz
// SPI Clock Phase: Cycle Start
// SPI Clock Polarity: Low
// SPI Data Order: MSB First
SPCR=(0<<SPIE) | (1<<SPE) | (0<<DORD) | (1<<MSTR) | (0<<CPOL) | (0<<CPHA) | (0<<SPR1) | (1<<SPR0);
SPSR=(0<<SPI2X);
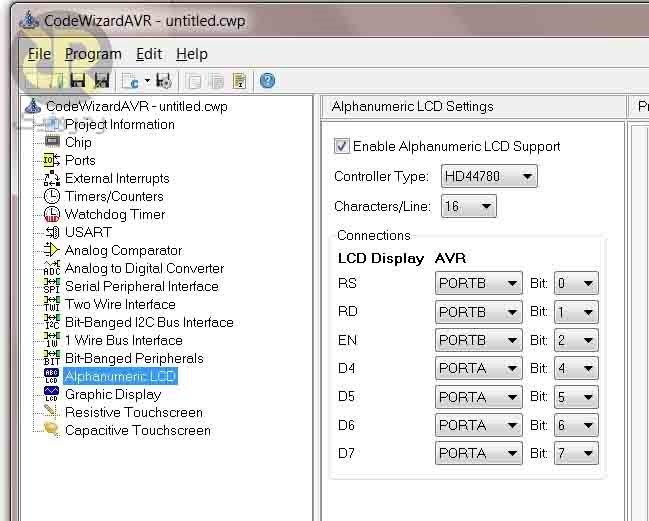
// Alphanumeric LCD initialization
// Connections are specified in the
// Project|Configure|C Compiler|Libraries|Alphanumeric LCD menu:
// RS - PORTB Bit 0
// RD - PORTB Bit 1
// EN - PORTB Bit 2
// D4 - PORTA Bit 4
// D5 - PORTA Bit 5
// D6 - PORTA Bit 6
// D7 - PORTA Bit 7
// Characters/line: 8
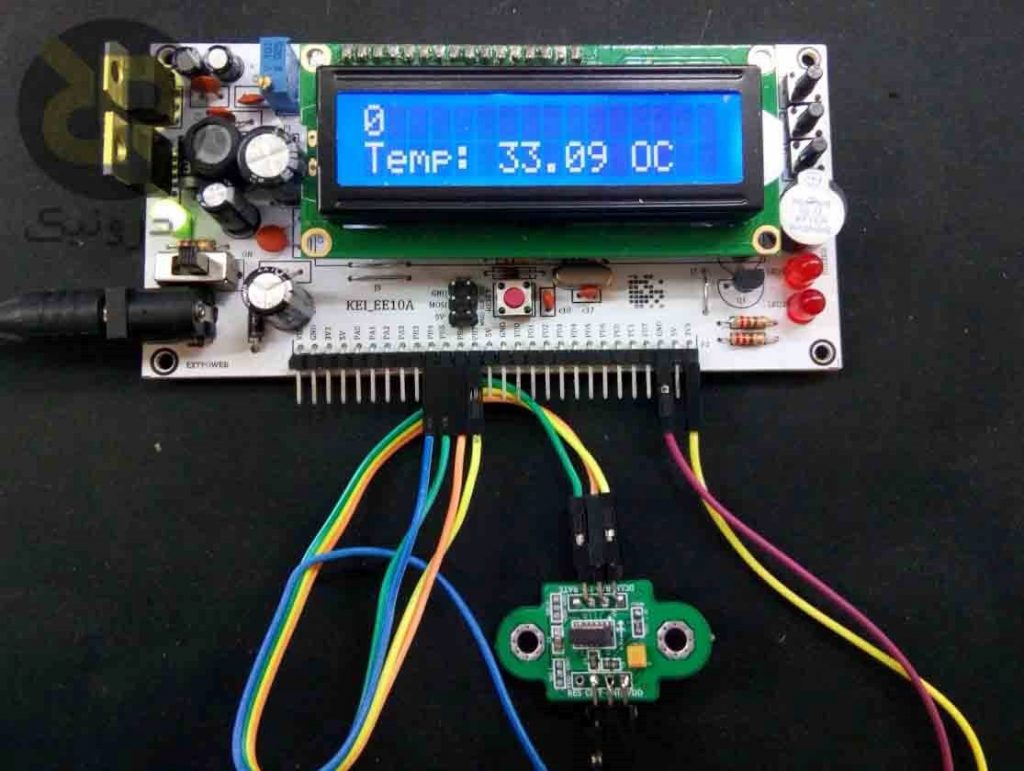
lcd_init(16);
lcd_clear();
lcd_gotoxy(6,0); //row 0 column 6
lcd_printf("KEI");
lcd_gotoxy(6,1); //row 1 column 6
lcd_printf("CAN");
delay_ms(1500);
while (1)
{
// Place your code here
delay_ms(10);
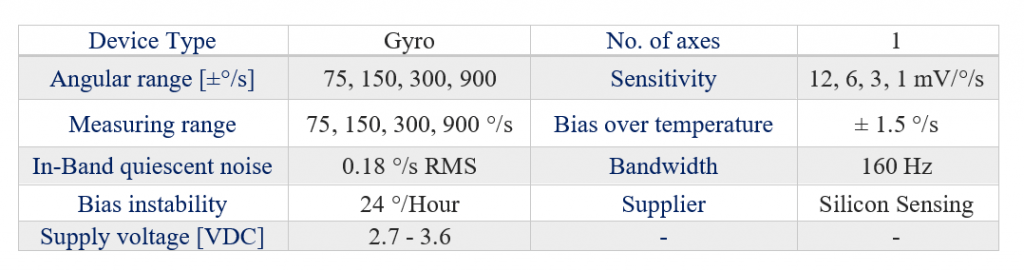
address=spi_read(0x38,6);//Command Byte (Byte 1) 0x38: 75°/s Rate Range
if(*(address)==0x03)//check status data (Byte 1)
{
gyro= (int)(*(address+1))<<8 |(*(address+2));// (Byte 2) & (Byte 3)
gyro=gyro/96;//scale factor for 75°/s
temperature= (int)(*(address+3))<<8 |*(address+4);// (Byte 4) & (Byte 5)
temperature-=531;//from datasheet
temp=(float)temperature/2.75; //scale factor
checksum=*(address+5);//(Byte 6)
ltoa(gyro,gyro_ch);
//ltoa() function in C language converts long data type to string data type
ftoa(temp,2,temp_ch);
//convert a floating point number to a character array to display on LCD
ltoa(gyro,gyro_ch);
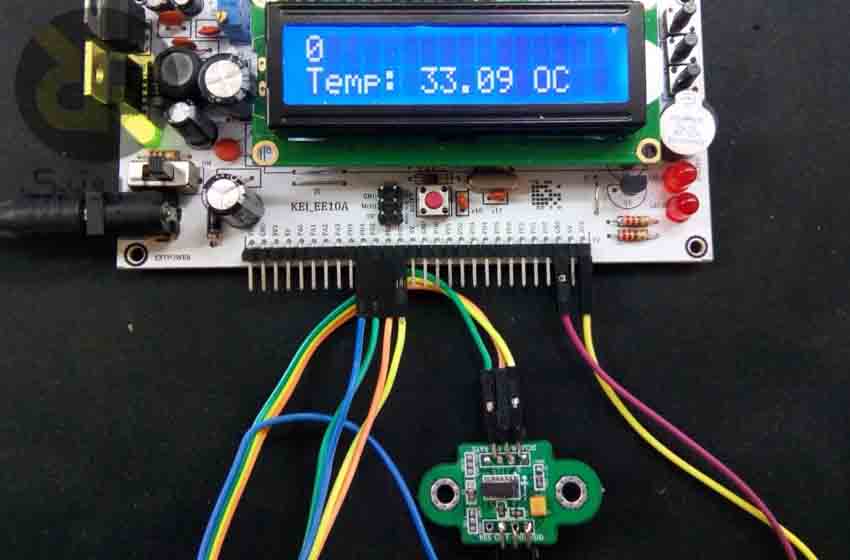
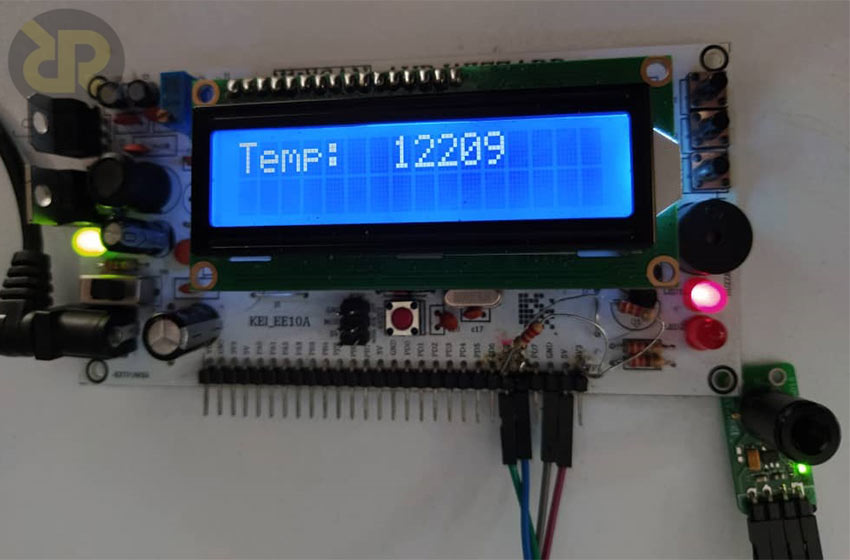
lcd_clear();
lcd_gotoxy(0,0); //row 0 column 0
lcd_puts(gyro_ch);
lcd_gotoxy(0,1); //row 1 column 0
lcd_puts("Temp: ");
lcd_puts(temp_ch);
lcd_puts(" OC");
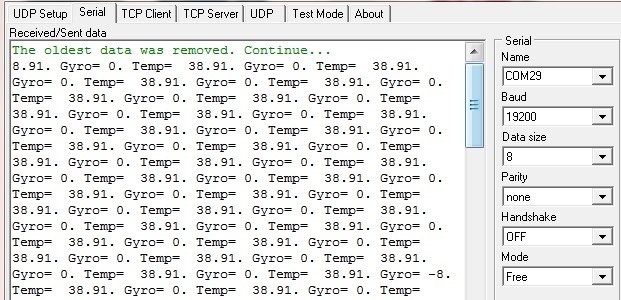
uart_print(". Gyro= ");
uart_print(gyro_ch); // sending data by UART
uart_print(". Temp= ");
uart_print(temp_ch); // sending data by UART
}
}
}
void uart_putchar(char z)
{
UDR = z;
while ( !( UCSRA & (1<<UDRE)) ) ; //Wait for transmission complete
}
void uart_print(char *st)
{
int stl, i;
stl = strlen(st);
for (i=0; i<stl; i++)
uart_putchar(*st++);
}
uint8_t * spi_read(uint8_t data,uint8_t size)
{
uint8_t i,chsum=~data;
uint8_t buff[]={0,0x00,0x00,0x00,0x00,0};
buff[0]=data;buff[5]=chsum;//refer to datasheet
PORTB.4=0;//chip select pin
for (i=0;i<80;i++);//delay (important!)
for(i=0;i<size;++i)
{
SPDR=buff[i];//status register address
while(!(SPSR & (1<<SPIF))); //Wait for transmission complete
read_data[i]=SPDR;
}
for (i=0;i<20;i++);//delay
PORTB.4=1;
return read_data;
}