lcd_clear();
i2c_readReg(itg_address<<1,0x1B, (uint8_t*)temperature,2);
i2c_readReg(itg_address<<1,0x1D, (uint8_t*)gyro_data,6);
temperature_c = (((float) (temperature[0]<<8 | temperature[1]))+13200) / 280 + 35.0; // Gyro chip temperature in degrees Centigrade
gyro_x=(float)((int16_t)(gyro_data[0]<<8 | gyro_data[1]))/14.375; // converting to (º/s) (from datasheet)
gyro_y=(float)((int16_t)(gyro_data[2]<<8 | gyro_data[3]))/14.375; // converting to (º/s)
gyro_z=(float)((int16_t)(gyro_data[4]<<8 | gyro_data[5]))/14.375; // converting to (º/s)
switch (user)
{
case 0 :
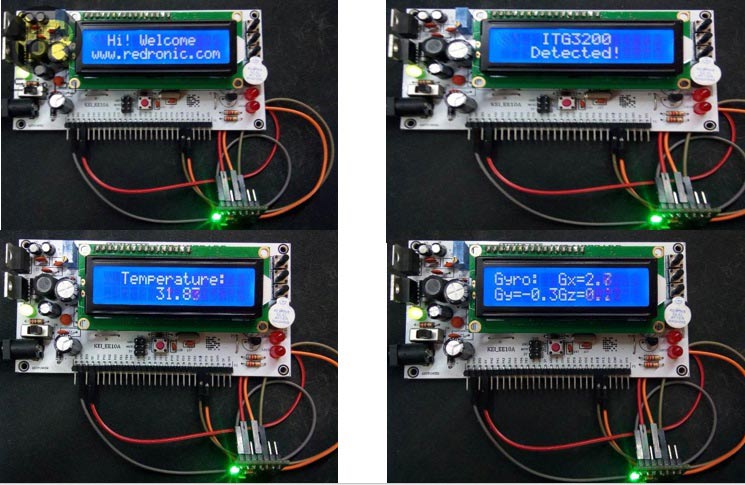
lcd_gotoxy(0,0); //line 0, char 0
lcd_puts(" Temperature: ");
lcd_gotoxy(6,1); //line 1, char 6
ftoa(temperature_c,2,lcd_data); // Convert integer to string
lcd_puts(lcd_data);
break;
case 1 :
lcd_gotoxy(0,0); //line 1, char 0
lcd_puts("Gyro: ");
lcd_puts(" Gx=");
ftoa(gyro_x,1,lcd_data); // Convert integer to string
lcd_puts(lcd_data);
lcd_gotoxy(0,1); //line 2, char 0
lcd_puts("Gy=");
ftoa(gyro_y,1,lcd_data); // Convert integer to string
lcd_puts(lcd_data);
lcd_puts(" Gz=");
ftoa(gyro_z,1,lcd_data); // Convert integer to string
lcd_puts(lcd_data);
break;
}
}
delay_ms(100);