فضای کار ربات
رباتها میتوانند بسته به پیکربندی و اندازه پیوندها و مفاصل مچ دست، به مجموعهای از نقاط اطراف خود دسترسی داشته باشند؛ که یک فضای کاری را تشکیل میدهند. شکل فضای کاری هر ربات، بهطور منحصربهفردی با طراحی آن، مرتبط است. فضای کار را میتوان با نوشتن معادلات حاکم بر پیوندها و مفاصل ربات و همچنین در نظر گرفتن محدودیتهای آنها مانند دامنه حرکات برای هر مفصل؛ بهصورت ریاضی، محاسبه نمود.
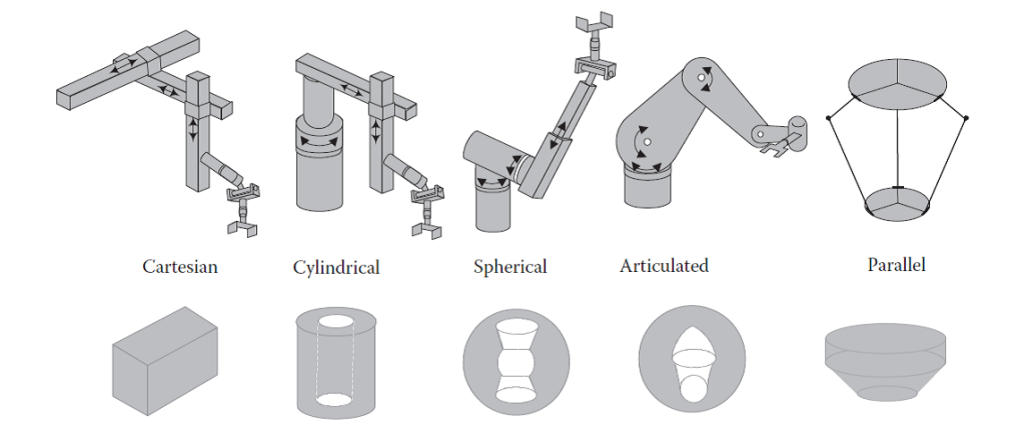
از طرفی، فضای کاری را میتوان به صورت تجربی، با حرکت مجازی هر مفصل در دامنهی حرکاتش، و ایجاد تمام فضایی که میتواند به آن دسترسی داشته باشد و کمکردن آنچه نمیتواند به آن برسد؛ یافت. شکل ۳، فضای کاری تقریبی را برای برخی از تنظیمات رایج، نمایش میدهد. زمانیکه، یک ربات برای یک کاربرد خاص، درنظر گرفته میشود؛ فضای کاری آن، باید موردمطالعه قرار گیرد تا اطمینان حاصل شود؛ که ربات قادر به رسیدن به نقاط موردنظر است. اطلاعات مورد نیاز فضای کاری هر ربات خاص در برگههای دادهی سازنده، معرفی میشوند.