
کوادکوپتر، هواپیمای بدون سرنشین یا پهپاد مهم نیست این دستگاههای کوچک، جذاب و سرگرم کننده را چه مینامید، در این مقاله اصول ابتدایی طراحی و ساخت آنها را قدم به قدم بررسی خواهیم کرد.
اما یک کوادکوپتر دقیقا ً چگونه کار میکند؟ چگونه پرواز میکند و چه اجزایی را باید کنار هم قرار دهید تا خودتان یک کوادکوپتر بسازید؟ با من همراه باشید تا این راز رو برایتان حل کنیم.
کوادکوپترها چگونه پرواز میکنند
تمرکز این مقاله بر کواد کوپترها است، اما بسیاری از آنچه که در ادامه توضیح داده میشود به رباتهای پرنده دیگر با بیش از چهار پروانه نیز قابل تعمیم است. بنابراین اگر شما در حال ساخت اکتاکوپتر (همانند کوادکپترها هستند اما بجای ۴ ملخ ، ۹ ملخ دارند) با بسیاری از آنچه شما در اینجا مطالعه خواهید کرد، دارای شباهت است.
قبل از شرح چگونگی عملکرد یک کواد کوپتر و یا هر مولتی روتاتور (هر دستگاه چند موتوره قابل پرواز)، برخی مفاهیم اساسی وجود دارد که تعریف آنها ضروری است. گام، انحراف و گردش. این اصطلاحات به سه بعد اشاره دارد که یک آزادی عمل یک هواپیما در حین پرواز را معرفی میکنند.
- گام (Pitch): گام به بالا یا پایین رفتن دماغه هواپیما اشاره میکند. برای درک بهتر شما میتوانید به کوهنوردی و یا غواصی فکر کنید. (چرخش دماغه به بالا یا پایین حول محور بال به بال)
- انحراف (Yaw): انحراف به چپ یا راست رفتن دماغه هواپیما اشاره دارد. (چرخش دماغه به چپ یا راست حول محور بالا و پایین)
- گردش (Roll): برای درک گردش، یک محور از جلو تا انتهای هواپیما فرض کنید. هواپیما با گردش حول این محور اصطلاحا حرکت رول یا گردش انجام میدهد. شما همچنین میتوانید گردش را به عنوان شیب هواپیما در نظر بگیرید. (دوران حول محور دماغه تا دم)
کواد کوپتر از 4 موتور استفاده میکند. دو تا از این موتورها ساعت گرد هستند، در حالی که جهت چرخش دو موتور دیگر پاد ساعت گرد است. محور چرخش موتورها و جهت چرخش آنان، در شکل زیر نشان داده شده است.
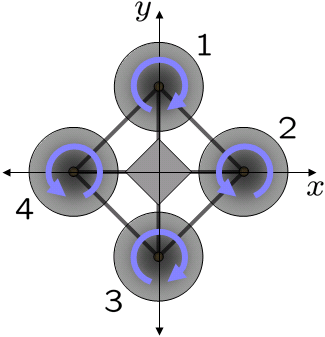
ارتفاع اصطلاحی است که احتمالا با آن آشنایی دارید، به بیان ساده ارتفاع توصیف کننده بالا یا پایین رفتن متناسب با یک معیار خاص است. یک کوادکوپتر میتواند با اعمال نیروی برابر به هر چهار موتور، ارتفاع خود را تنظیم کند.
به منظور تولید حرکت Yaw، (چرخش به چپ یا راست)، کوادکوپتر نیروی بیشتری را به یک مجموعه از موتورها اعمال میکند. به عنوان مثال یک کوادکوپتر ممکن است رانش بیشتری را به دو موتوری که ساعتگرد هستند، اعمال کند. این کار باعث افزایش گشتاور در محور Z کوادکوپتر شده و در نتیجه کواد کوپتر به دور خود خواهد چرخید.
از سوی دیگر پیچ و رول با اعمال رانش بیشتر بر روی یک موتور و رانش کمتر به موتور مخالف دیگر ایجاد میشود. به عنوان مثال، کوادکوپتر میتواند با اعمال نیروی رانش بیشتر به موتور ساعتگرد در جلو و نیروی رانش کمتر به موتور پاد ساعتگرد و ثابت نگه داشتن رانش دو موتور پادساعتگرد، محور چرخش خود را تنظیم کند.
تنظیم سرعت موتورهاتوسط کنترلرهای سرعت و برد الکترونیک انجام میشود.
موتورها
کواد کوپتر بدون موتورهای خود، به هیچ جا نمیتواند پرواز کند و حیاتی است که شما آنها را درست را انتخاب کنید. متاسفانه مشخصات موتور گاهی اوقات میتواند گیج کننده باشد.
اکثر کوادکوپترها از موتورهای جریان مستقیم DC بدون جاروبک (براشلس) استفاده میکنند. موتورهای بدون جاروبک شامل یک روتور با آهنربای دائمی و تعدادی میدان الکترومغناطیسی اطراف آن هستند، که انها را قطب نیز مینامند. موتورهای بدون جاروبک میتوانند از ۲ تا ۱۴ قطب داشته باشد. که هر چه تعداد قطبها بیشتر باشند، میتوان موتور را دقیقتر کنترل کرد.
موتورهای بدون جاروبک دارای سه سیم هستند، این سیمها موتورها را در سه فاز کنترل میکنند. با تغییر اتصالات روی این سیمها، میتوان در موتورها چرخش ساعتگرد یا پاد ساعتگرد داشته باشیم.
یکی از مشخصات کلیدی یک موتور کوادکوپتر مقدار KV آن است. KV به معنای کیلوولت نیست، درعوض نسبتی از تعداد چرخش در دقیقه (RPM) زمانی که یک اختلاف پتانسیل ۱ ولت به موتور بدون بار اعمال میشود، ارائه میدهد. KV را می توان به عنوان RPM/VOLT نیز تصور کرد. مقدار معمولی KV برای کواد کوپترها بین ۵۰۰ تا ۲۵۰۰ است. موتوری که KV پایینی دارد میتواند یک پروانه بزرگ را حرکت دهد و در نتیجه میتواند مقدار بیشتری نیروی پیشران ایجاد کند.
به عنوان یک قاعده کلی؛ کوادکوپترهایی که بیش از ۱ کیلوگرم وزن دارند از یک موتور در محدوده ۷۰۰ تا ۹۰۰ KV استفاده خواهند کرد. کوادکوپترهایی که بین نیم تا یک کیلوگرم وزن دارند از موتورهایی استفاده میکنند که بین ۹۰۰ تا ۱۳۰۰ KV دارند. و کرافتهای (هر نوع دستگاه قابل پرواز) زیر ۵۰۰ گرم از موتورها بین KV ۱۳۰۰ تا ۲۲۰۰ KV استفاده میکند.
حداکثر جریان مصرفی موتور یکی دیگر ازعوامل مهم است. قبل از انتخاب کنترل کننده سرعت الکترونیک (ESC) و باتری، دانستن این مقدار اندازه گیری شده در واحد آمپر مورد نیاز میباشد.
قدرت موتور همراه با اندازه پروانه مشخص شده است. این مشخصات مهمی است که نیاز به دانستن وزن کل کوادکوپتر شما دارد، به خاطر داشته باشید که این وزن شامل وزن خود موتورها است.
بنابر قاعده اساسی thumb (شست دست راست) ترکیب موتور و پروانه باید قادر به تولید رانش دو برابر وزن کوادکوپتر باشد. بنابراین در یک کوادکوپتر چهار موتوره الزامی است هر موتور به تنهایی قادر به تولید رانش برابر با نیمی از وزن کل کوادکوپتر باشد. به عبارت دیگر یک کوادکوپتر ۱ کیلوگرمی به چهار موتور نیاز دارد که هر کدام قادر به حداقل نیم کیلوگرم رانش هستند.
یکی دیگر از مشخصات مهم موتور قطر شفت است. این پارامتر مهم است زیرا آتعیین کننده پروانه کوادکوپتر خواهد بود.
همچنین شما می بایست محل نصب پیچهای موتور را نگاه کنید تا مطمين شوید که موتور خود را میتوانید با موفقیت به قاب کوادکوپتر خود نصب کنید.

پروانه (ملخ)
قطر و گام دو مشخصه اصلی یک پروانه است. پروانهها عموماً در مجموعههایی با ۲ پروانه ساعتگرد و ۲ پروانه پاد ساعتگرد، به فروش میرسند.
پروانهها در قطرها و گامهای مختلفی وجود دارند و میتوانند از پلاستیک، فیبر کربن یا حتی چوب ساخته شوند. پروانههای کوچک با قطر زیر ۸ اینچ برای مسابقه و آکروباتیک به همراه موتورهای KV بالا مورد استفاده قرار میگیرند، و همچنین پروانه های بیش از 8 اینچ قطر با موتورهای KV پایین برای بلند کردن محمولههای سنگین مانند دوربینهای ویدئویی استفاده میشود.
گام به طور کلی به عنوان “فاصله طی شده در هر چرخش” تعریف شده است. گام بالاتر به معنی چرخش کندتر است که سبب افزایش سرعت سیستم خواهد شد، اما از طرفی قدرت بیشتری نیز استفاده میکند. شما در واقع می توانید زمان پرواز از کواد کوپتر خود را به سادگی با جایگزینی پروانه با گام پایین تر افزایش دهید. پروانههای گام پایینتر میتوانند نیروی گشتاور بیشتری تولید کنند و موتور شما جریان کمتری مصرف خواهد کرد.
قطر پروانه به اندازه آن اشاره دارد. افزایش قطر باعث افزایش کارایی پروانه میشود اما باعث مصرف جریان بیشتر موتور نیز خواهد شد.
تطبیق موتور با پروانه عاملی برای ایجاد ثبات است، این امر میتواند بخصوص در هنگام حمل دوربین مهم باشد. در یک کوادکوپتر بزرگ برای حمل محمولههای بزرگ، پروانههای بزرگ و موتورهای KV پایین کارایی بهتری خواهد داشت.

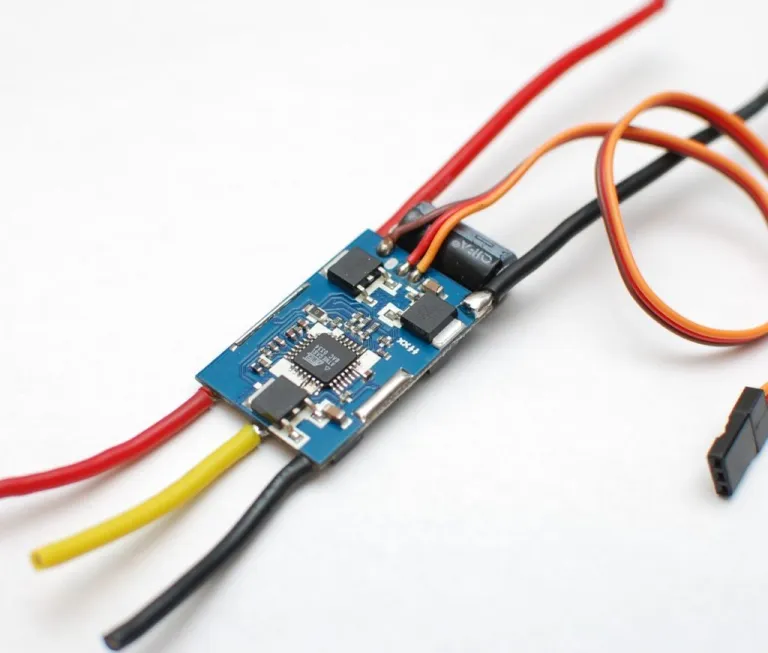
کنترل کنندههای سرعت الکترونیکی (ESC)
برد الکتریکیای که موتورهای DC بدون جاروبک را کنترل میکند کنترل کننده سرعت الکترونیکی یا ESC نامیده میشود. برای هر یک از موتورها به یکی از این بردهای الکتریکی نیاز خواهید داشت.
ESC سه مجموعه سیم خواهد داشت. یک مجموعه سه سیم ضخیم وجود دارد که به سه سیم روی موتور بدون جاروبک شما متصل میشوند. یک مجموعه دو سیم ضخیم دیگر به برد منبع تغذیه متصل میشوند، که ولتاژ مورد نیاز ESC و موتورها را تأمین میکند. همچنین یک مجموعه سه سیم نازکتر وجود خواهد داشت که به کنترل کننده پرواز شما متصل میشوند.
ESC باید بتواند حداکثر جریانی که موتور شما مصرف میکند را تامین کند. انتخاب یک ESC با توانایی تامین جریان بالاتر از حداکثر جریان موتور بهینه است.
کنترل کنندههای پرواز
کنترل کننده پرواز مغز کوادکوپتر شماست. این برد الکترونیکی، سرعت موتورهای شما را با ارسال سیگنال به ESC ها کنترل میکند.
کنترل کنندههای پیشرفته پرواز ویژگیهای بیشتری دارند و با حسگرهایی مانند ژیروسکوپ، شتاب سنج، سنسور سونار، GPS و مگنتومتر (سنسور مغناطیسی) همراه هستند. کنترل کنندههای پرواز ساده تنها حاوی ژیروسکوپ هستند و همین برای اکثر مبتدیان کاملاً کافی است.
کنترل کننده پرواز، سیگنالهای گیرنده رادیویی پردازنده را میگیرد تا شما بتوانید از راه دور کوادکوپتر خود را کنترل کنید. سپس جادوی خود را انجام میدهد و سیگنالهایی را برای کنترل سرعتهای حرکتی به ESC ها میفرستد.
کنترل کنندههای پرواز در واقع کامپیوترهای کوچکی هستند که میتوانند با اتصال به کامپیوتر برنامه ریزی و به روز شوند. با وجود پیچیدگی کنترل کنندههای پرواز، آنها در واقع گران قیمت نیستند.

فرستندهها و گیرندههای رادیویی
کوادکوپتر شما یک گیرنده رادیویی آنبرد (on-board) خواهد داشت و شما کواد کوپتر را با یک فرستنده رادیویی کنترل دستی (ریموت کنترل) هدایت خواهید کرد. هر دو گیرنده و فرستنده توسط تعداد کانالهایی که پشتیبانی میکنند و با فرکانسی که بر اساس آن عمل میکنند، مشخص میشوند.
هر کانال در سیستم رادیویی یک تابع یا دستگاه واحد را در کوادکوپتر کنترل میکند. برای کنترل کواد کوپتر حداقل نیاز به چهار کانال دارید، اگر چه اکثر مردم با حداقل شش کانال شروع میکنند. از کانالهای اضافی میتوان برای کنترل روشنایی یا یک موتور گیمپال (موتور بدون جاروبک سه فاز) برای تغییر جهت یک دوربین استفاده کرد.
چهار کانال اساسی به صورت زیر استفاده میشود:
یک کانال برای سرعت، یک کانال برای چرخش راست و چپ، یک کانال برای گام به جلو و عقب و یکی برای چرخش چپ و راست. به عبارت دیگر پیشرانش (گاز)، Yaw، Pitch و Roll. همچنین میتوان از یک کانال برای تعویض بین حالتهای مختلف پرواز استفاده کرد.
اگر شما قصد استفاده از چند کواد کوپتر را دارید، شما میتوانید یک فرستنده و چندین گیرنده سازگار بخرید، بدیهی است که تنها به شما اجازه پرواز یک کواد کوپتر را در یک زمان خواهد داد. این یک استراتژی خوب است که به شما اجازه می دهد تا شما استطاعت مالی خرید یک فرستنده با کیفیت را داشته باشید، گیرندهها به طور کلی نسبتا ارزان قیمت هستند.
ترکیبهای فرستنده – گیرنده در دو حالت مختلف کار می کنند، این حالتها اساساً پیکربندی کنترل بر روی فرستنده را تعیین میکنند.
فرستنده حالت 2 RC با دست راست آیلرون (رول) و آسانسور (پیچ) را کنترل می کند، در حالی که سکان (انحراف) و گاز توسط دست چپ خلبان کنترل میشود. حالت 1 این کنترلها را معکوس میکند. در صورتی که این اولین تجربه شما از طراحی است، توصیه میشود که تنظیم تجهیزات خود را در حالت 2 بکار بگیرید.

باتری
بدون باتری، کوادکوپتر شما نمیتواند به جایی برود. انتخاب باتری یکی از مهمترین تصمیماتی است که هنگام طراحی و ساخت کوادکوپتر خود خواهید گرفت.
باتریهای بزرگتر دارای امکانات بیشتری خواهند بود و به همین دلیل اجازه زمان پرواز طولانیتری را خواهند داد. با این حال با بیشتر شدن ظرفیت باتری، وزن آن نیز بیشتر شده و اضافه کردن وزن به کواد کوپتر، خود زمان پرواز را کاهش میدهد و موتورها برای بلند کردن محموله مورد نظر، جریان بیشتری نیاز خواهند داشت. به خاطر داشته باشید که یک کوادکوپتر سنگینتر چابکی کمتری دارد.
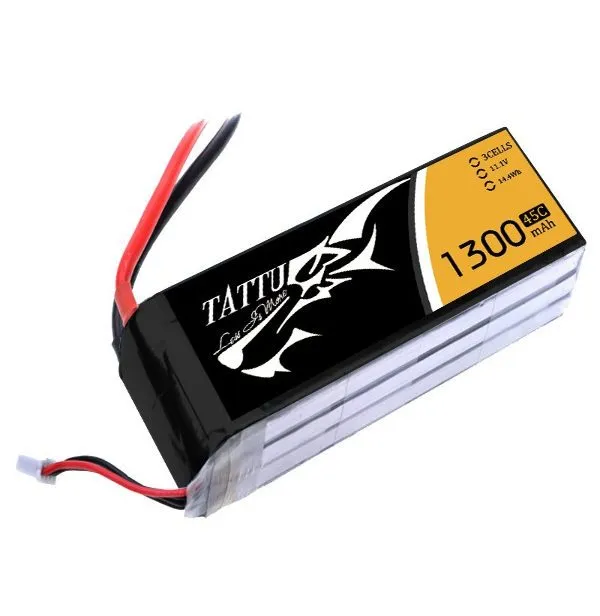
مشخصات اصلی باتری ظرفیت جریان آن است، که به صورت میلی آمپر در ساعت یا “mAh” مشخص میشود. یک باتری ۲۲۰۰ میلی آمپری میتواند ۲٫۲ آمپر جریان را به مدت ۱ ساعت تأمین کند.
یکی دیگر از مشخصات باتری ولتاژ آن است. باتریها شامل تعدادی سلول هستند که هر سلول یک باتری لیپو معمولی قادر به تحویل ۳٫۷ ولت است. بنابراین ولتاژهای باتری معمولاً به عنوان چند برابر ۳٫۷ ولت مشخص میشوند. برای مثال ۳٫۷ ولت، ۷٫۴ ولت، ۱۱٫۱ ولت و ۱۴٫۸ ولت رایج هستند. اگر شما یک باتری ولتاژ بالاتر را انتخاب کنید مطمئن شوید که هر دو ESC و موتورهای خود را قادر به پشتیبانی از آن ولتاژ خواهند بود.
قاب (فریم کواد کوپتر)
نهایتا به بررسی قاب کواد کوپتر میرسیم، که تجهیزات کواد کوپتر را به هم متصل میکند. قابها میتوانند از تعدادی مواد مانند چوب، پلاستیک یا فیبر کربن ساخته شوند. فیبر کربن میتواند به منظور تحمل وزنهای زیاد بسیار قوی باشند اما همچنین میتواند شکننده نیز باشند، عاملی که بدون شک باید در نظر گرفته شود این است که، کواد کوپتر شما نهایتا در یک زمانی سقوط خواهد کرد.
اندازه قاب یک کوادکوپتر در واحد میلی متر مشخص شده است، این فاصله بین موتورهای روی کوادکوپتر شماست. اندازههای رایج ۱۸۰، ۲۵۰ و ۴۰۰ میلی متر است. کوادکوپترهای مسابقهای معمولاً در اندازه ۲۵۰ میلی متری هستند.
در هنگام انتخاب یک قاب برای کوادکوپتر خود مطمئن شوید که جهت نصب کردن چیزهایی مانند ESC و کنترل کننده پرواز، و همچنین هر گونه اقلام اضافی مانند دوربینهایی که شما مایل به حمل آنها هستید، به اندازه کافی فضا در اختیار دارید.
برخی از علاقمندان نیز قاب های خود را می سازند که اغلب از امکان ساخت با چوب بهره میبرند. چوب در واقع یک انتخاب خوب به عنوان یک ماده ساخت آسان و نسبتا ارزان است. همچنین تغییر آن جهت افزودن لوازم جانبی به کواد کوپتر آسان است. چوب با این حال میتواند باعث پیچش و خمش شود که این امر سبب پرواز نامنظم کوادکوپتر خواهد شد.
شما حتی می توانید یک فریم یا بخش هایی از یک قاب را با چاپگر سه بعدی بسازید.




