نکاتی که پیش از طراحی ربات باید مورد توجه قرار بگیرند:
رباتها پس از به نمایش درآمدن در فیلمهایی همچون جنگ ستارگان، ترمیناتور و وال ای تبدیل به بخشی از فرهنگ مدرن ما شدند. بر اساس برخی پیشبینی ها در آینده عصری رباتیک فراخواهد رسید که در آن رباتها حضوری پررنگ در تمام جوانب زندگی ما خواهند داشت. رباتها میتوانند کارهای متفاوتی را به انجام برسانند و کاربردهای زیادی داشته باشند اما آیا شما از مواردی که پیش از ساخت و یا طراحی ربات باید مورد توجه قرار بگیرد باخبر هستید؟
این مسأله از اهمیت بالایی برخوردار است چرا که کارایی و تأثیر ربات کاملاً از این امر نشأت میگیرد.
طراحی ربات (خواه برای مصارف صنعتی، خواه جهت تهیه فیلمهای علمی تخیلی) نیازمند برنامهای جامع میباشد چرا که در این امر باید دقت، قدرت ، سرعت و بسیاری از پارامترهای دیگر به صورت همزمان مد نظر قرار گیرند.
1- شیوه حرکت رباتها
رباتها میتوانند ثابت یا متحرک باشند. رباتهای متحرک شامل رباتهای چرخ دار، رباتهای خزنده، رباتهای شناگر و چند دسته دیگر میشوند. رباتهای ثابت نیز شامل بازوهای رباتیک، رباتهایی که تنها صورت دارند و رباتهای صنعتی میشوند، با وجود اینکه اینگونه رباتها در دسته ثابت جای میگیرند، اما کاملاً بی تحرک نیستند و حرکاتی محدود به فضای کاری خود دارند. هر کدام از این رباتها ، برای عمل در پلتفرمی خاص طراحی شدهاند به عنوان مثال برای حرکت روی زمین ، پرواز در هوا ، حرکت در آب یا در فضا و …
البته برخی از رباتها وجود دارند که در بیش از یک پلتفرم فعالیت دارند و میتوانند در عین حرکت روی زمین به پرواز دربیایند یا داخل آب فرو بروند.
حرکت با کمک چرخ، یکی از مرسوم ترین مکانسیمهای طراحی ربات میباشد چرا که این سیستم طراحی برای رباتهای متحرک بسیار کارآمد است و شیوه کنترل سادهتری نسبت به مدلهای متحرک دیگر دارد. علاوه بر این، در رباتهای چرخدار حفظ تعادل مقوله چندان دشواری نخواهد بود چرا که چرخ ها همواره با زمین در تماس هستند. در رباتهای دو چرخ نیازی به سیستم تعلیق نیست اما رباتهایی که بیش از دو چرخ دارند برای حفظ تعادل نیازمندسیستم تعلیق هستند.
درواقع اولویت اول در رباتهای چرخ دار ، کنترل و مسیریابی است و حفظ تعادل در اولویتهای بعدی قرار میگیرد.
بسته به شیوه حرکت رباتها، میتوان آنها را به دو دسته هولونومیک (Holonomic) یا غیر هولونومیک (Non-Holonomic) تقسیم کرد.
1-1 سیستم حرکت هولونومیک
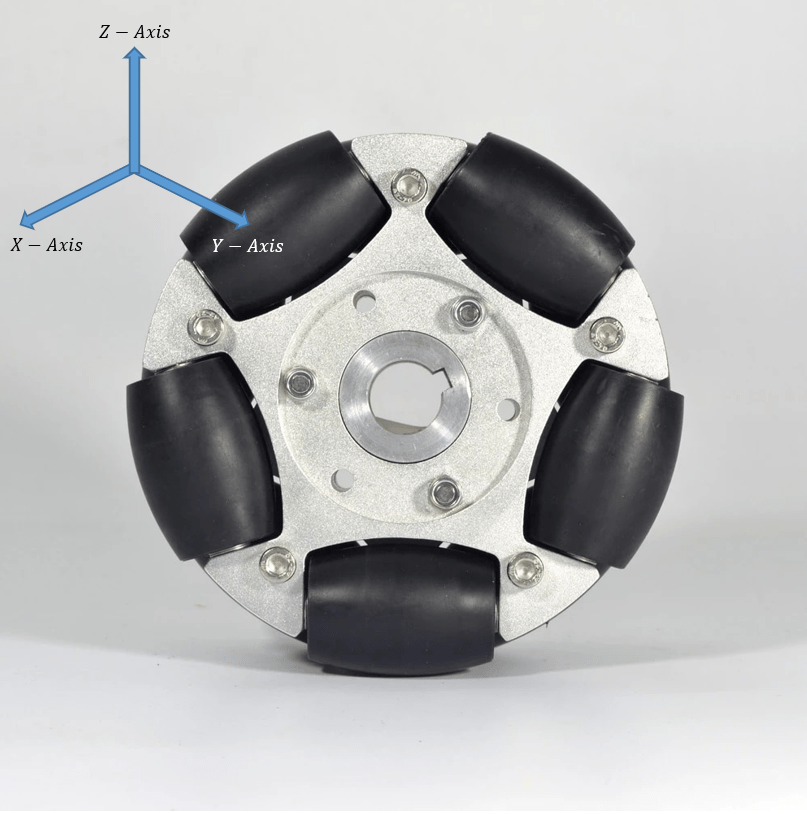
سیستم هولونومیک ارتباط بین میزان کنترل و میزان درجه آزادی عملکرد یک ربات را به تصویر میکشد. اگر میزان درجه آزادی عمل یک ربات با میزان درجه کنترل و فرمان پذیری آن برابر باشد، میتوان گفت که ربات از سیستم هولونومیک تبعیت میکند. رباتهایی با چرخهای کاستور (castor wheels) و یا چرخهای همه جهته (Omni-wheels)، مثالهایی از یک سیستم هولونومیک هستند. این رباتها به راحتی به هر جهتی حرکت میکنند. در شکل زیر نوعی از چرخ نشان داده شده که به راحتی میتواند هم در محور x و هم در محور y چرخش داشته باشد، بنابراین قادر به حرکت در دو جهت خواهد بود.
2-1 سیستم حرکت غیر هولونومیک
زمانی که میزان کنترل عملکرد یک ربات کمتر از درجات کل آزادی عمل باشد، سیستم غیر هولونومیک نامیده خواهد شد. به عنوان مثال یک ماشین ۳ مولفه درجه آزادی دارد: موقعیت مکانی اش نسبت به محور x و y و جهت قرارگیری در فضا. اما تنها دو درجه آزادی قابل کنترل است، یکی میزان شتاب و دیگری زاویه چرخهایی که به فرمان متصل است که این امر چرخاندن اتومبیل به هر جهتی را برای راننده ناممکن خواهد کرد (مگر آنکه ماشین لیز بخورد).
3-1 کنترل مازاد (Redundant Drive)
هنگامی که میزان المانهای قابل کنترل (تعداد درجات کنترل) از میزان کل درجات آزادی عمل بیشتر میشود، با یک سیستم کنترل مازاد سروکار خواهیم داشت. به عنوان مثال بازوی یک ربات یا دست انسان ۶ درجه آزادی عمل دارد اما ۷ حالت قابل کنترل وجود دارد ( اگر دست خود را بچرخانید و بپیچانید متوجه خواهید شد که شانه، آرنج و مچ دست شما، در حرکات متفاوت و ترکیبی با یکدیگر، میتوانند ۷ حالت حرکتی متفاوت را به وجود بیاورند.
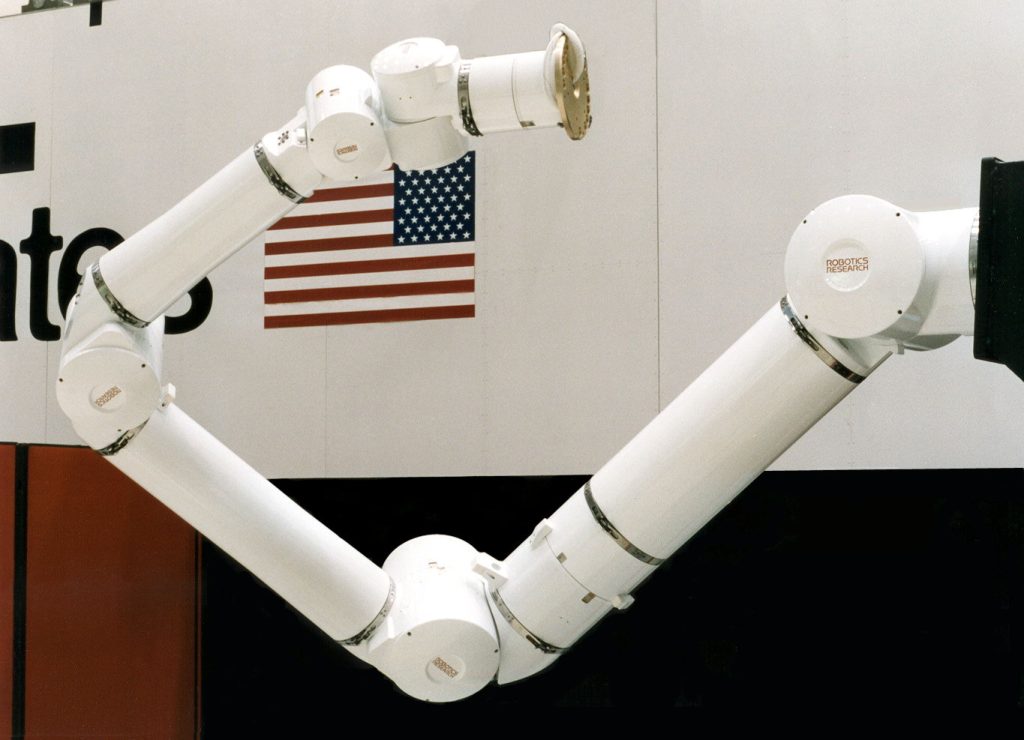
بازوی ماژولار
2- تئوریهای کنترل چرخ
در بخشهای قبلی، انواع مختلف چرخها و نحوه قرارگیری آنها در کنار یکدیگر مورد بررسی قرار گرفت. هنگامی که شما در مورد تعداد چرخهای ربات خود و نوع آنها به قطعیت رسیدید نیاز دارید که شیوه کنترل آنها را مشخص کنید در قسمت زیر برخی از مکانیسمهای کنترلی مرسوم به تصویر کشیده شدهاند.
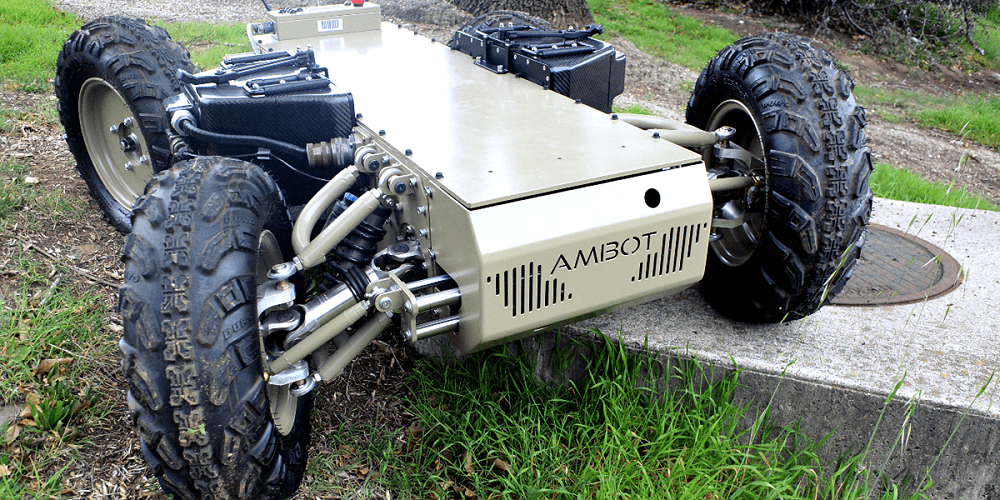
پلتفرم ربات چرخ دار GRP440
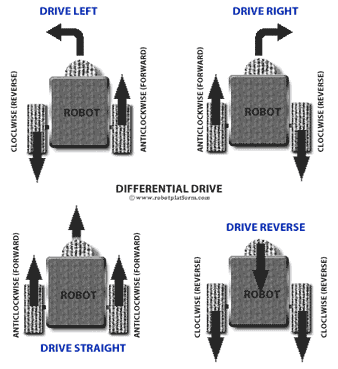
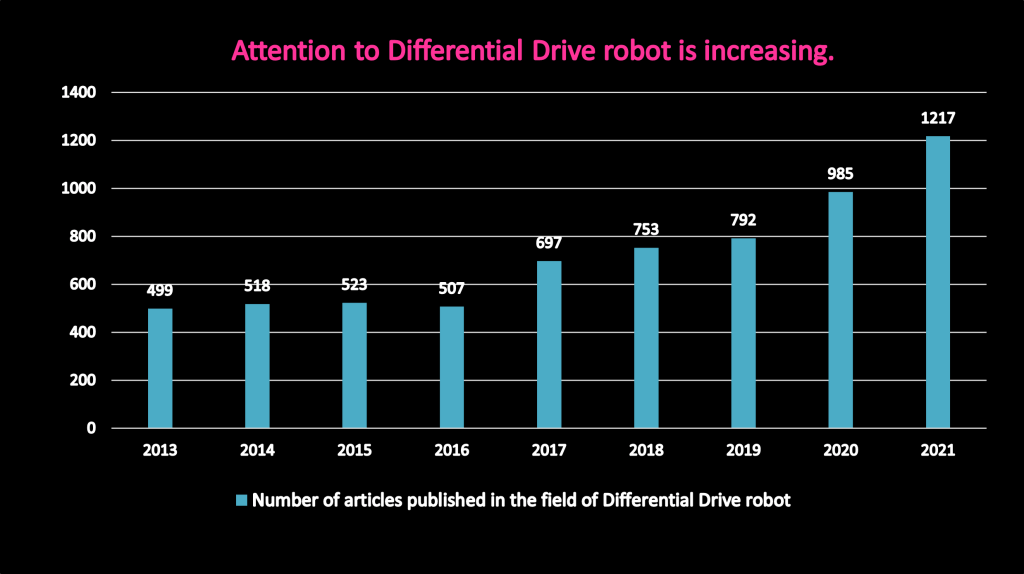
1-2 کنترل دیفرانسیل و یا چرخهای دیفرانسیل (Differential Drive)
این شیوه یکی از مرسومترین مکانیسمها برای سازندگان ربات بهخصوص برای مبتدیان میباشد، که بر اساس یک اصل ساده استوار است: اختلاف سرعت بین دو موتور گرداننده چرخهای ربات، سبب هدایت ربات به جهتهای مختلف خواهد شد. درواقع به همین دلیل است که اسم این نوع کنترل ربات، کنترل دیفرانسیلی میباشد.
رباتهای درای سیستم کنترل دیفرانسیلی میتوانند، 1- دارای دو چرخ که با وجود اینکه توسط یک محور مشترک افقی به یکدیگر متصل هستند به صورتهای متفاوتی کنترل میشوند، و یا 2- دارای دو چرخ مستقل از یکدیگر و یک چرخ توپی هرزگرد (به منظور حفظ تعادل) باشند.
۱) اگر سرعتهای زاویهای به لحاظ مقدار و جهت مشابه یکدیگر باشند یا به عبارتی دیگر چرخها با سرعت و در جهت یکسان حرکت کنند، ربات یک مسیر خطی را طی میکند که بسته به چرخش موتورها یا به سمت جلو و یا به سمت عقب خواهد بود.
۲) اگر سرعتهای زاویهای از نظر مقدار مشابه یکدیگر باشند اما در جهتهای مخالف هم باشند، یا به عبارت دیگر چرخ ها با سرعت یکسان اما در جهتهای مخالف حرکت کنند ( به عنوان مثال یک چرخ در جهت حرکت عقربه های ساعت بچرخد و دیگری در جهت خلاف عقرب های ساعت) ربات حول محور عمودی اش خواهد چرخید. در واقع قابلیت یک دور کامل چرخیدن یکی از بزرگترین مزیتهای رباتهای دارای چرخ دیفرانسیلی میباشد (حرکت در شعاع صفر).
۳) اگر سرعتهای زاویهای از نظر مقدار با یکدیگر تفاوت داشته باشد ( صرف نظر از جهت چرخیدن چرخ ها)، ربات مسیری منحنی را طی میکند به عنوان مثال اگر یک چرخ بچرخد و دیگری ثابت باقی بماند ربات یک چرخش ۹۰ درجه را تجربه خواهد کرد.
بنابراین میتوان دریافت که تغییر سرعت و جهت چرخها میتواند سبب تغییرات زیادی در شیوه و مسیر حرکت ربات شود.
طراحی، ساختار مکانیکی و الگوریتم کنترل در کنترل دیفرانسیلی بسیار ساده میباشد اما این سیستم کنترل معایبی نیز دارد، از جمله آنکه محدودیتهایی جهت کنترل ربات به خصوص در حرکت مستقیم ایجاد خواهد شد. در این حالت ربات به خوبی روی یک خط صاف حرکت نمیکند و نمیتواند در زوایههای دلخواه چرخش مناسب و کافی را داشته باشد بهخصوص هنگامی که برای چرخاندن چرخ ها از موتورهای DC استفاده میشود. این شرایط به دلیل اختلاف بین تعداد چرخشهای هر چرخ در یک زمان بهخصوص روی میدهد، که جهت رفع این مشکل نیاز است یک فاکتور تصحیح برای سرعت موتور در نظر گرفته شود. به عنوان مثال اگر شما قصد دارید ربات تان را در یک مسیر خطی به حرکت دربیاورید و احساس میکنید که ربات تان به یک سمت متمایل شده فاکتور تصحیح با کاهش سرعت چرخی که در جهت مخالف قرار دارد به کمک شما خواهد آمد و از انحراف بیشتر ربات شما جلوگیری خواهد کرد.
اما گزینه بهتر این است که از دو سیستم کنترل دیفرانسیلی استفاده شود در این صورت به راحتی حرکت ربات در یک خط صاف را تضمین خواهد شد. در این حالت دو چرخ به دو موتور متصل شدهاند که یک موتور وظیفه کنترل شیوه چرخش چرخها را بر عهده دارد و دیگری جهت چرخها را کنترل میکند. عده ی قلیلی از سازندگان ربات از تکنیک کنترل دیفرانسیلی 3L استفاده میکنند به همین دلیل این روش چندان مرسوم نیست و مزایای چندانی نسبت به کنترل دو گانه دیفرانسیلی ندارد بنابراین از توضیح آن صرف نظر خواهد شد.
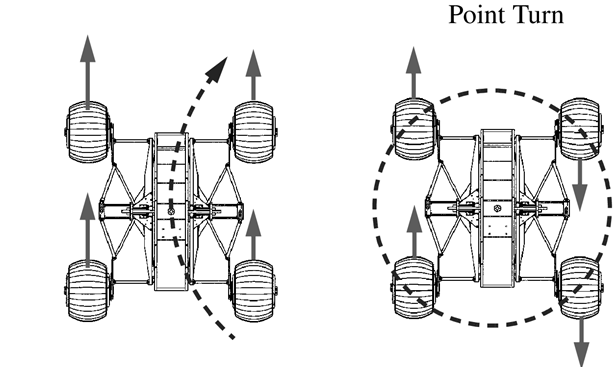
2-2 سیستم کنترل لغزشی (Skid steering)
کنترل لغزشی یکی دیگر از مکانیسمهای کنترلی است پرکاربرد در وسایل نقلیه چرخ دار است. این سیستم در رباتهای دارای ریل یا چرخ با کنترل دیفرانسیلی به کار برده میشود. مهمترین وسایل نقلیهی که از این سیستم استفاده میکنند، تانک ها و بولدزرها میباشند.
در این متد چرخها یا ریلهای یک سمت از وسیله نقلیه درگیر میشوند و با ایجاد سرعتهای متفاوت در سمت دیگر وسیله که غیر قابل کنترل است چرخش در جهت دلخواه را ممکن خواهند کرد.
اگر شما اصول سیستم کنترل دیفرانسیلی را به درستی درک کرده باشید متوجه خواهید شد که کنترل لرزشی میتواند زیر مجموعهای از این سیستم به حساب بیاید. به این صورت که در رباتها با سیستم کنترل دیفرانسیلی یک چرخ وجود دارد که تعادل ربات را حفظ میکند و در سیستم کنترل لرزشی آن چرخ با دو چرخ که به موتور متصل شده جایگزین شده است. فرض کنید قصد دارید ربات تان را به سمت چپ بچرخانید بنابراین چرخهای سمت راست باید مستقیم حرکت کنند و چرخ های سمپ چپ به سمت عقب، در این صورت ربات به سمت راست متمایل خواهد شد. اگر این شرایط به همین منوال ادامه پیدا کند ربات درجا ۳۶۰ درجه خواهد چرخید. حال فرض کنید که ربات دارای ۴ چرخ باشد که به صورت ردیفی در کنار یکدیگر قرار گرفتهاند و در حالیکه چرخ های جلو و عقب چرخش دارند چرخ های مرکزی روی زمین کشیده میشوند، این حالت نیز یکی از حرکات سیستم کنترل لغزشی میباشد.
برخی از فواید استفاده از سیستم کنترل لغزشی عبارت است از :
۱) قدرت حرکت وسیله نقلیه بالا خواهد رفت که به حرکت آن در محیطهای ناهموار بسیار کمک خواهد کرد.
۲) از این تکنیک میتوان هم برای رباتهای چرخدار و هم برای رباتهای ریلی استفاده کرد.
۳) از آن جایی که هیچ چرخ منحصر به فردی برای کنترل وجود ندارد مکانیسم کنترلی بهخصوصی مورد نیاز نمی باشد.
۴) از آن جایی که تمام چرخهای هر سمت در جهتی واحد حرکت میکنند تنها ۲ موتور برای کنترل و حرکت ربات کافی خواهد بود.
۵) در این متد نیازی به استفاده از چرخهای کاستر نیست، بنابراین بسیاری از مشکلاتی که از جانب آنها ناشی میشود رفع خواهد شد.
اما این شیوه کنترلی معایبی نیز دارد از جمله :
۱) از آن جایی که از تکنیک لغزشی استفاده میشود، چرخها و ریلها زودتر از حد معمول مستهلک خواهند شد البته میزان اصطکاک چرخ ها با زمین میتواند با استفاده از چرخهای مخصوصی مانند مکانیوم (Mecanum ) کاهش یابد.
۲) بر خلاف رباتهایی که از کنترل دیفرانسیلی استفاده میکنند حرکت در یک مسیر مستقیم، برای رباتها با کنترل لغزشی تا حدی دشوار خواهد بود. چرا که برای نیل به این مقصود، هر دو موتور ربات باید با سرعتی یکسان حرکت کنند البته این مشکل قابل حل میباشد اما به هزینه ساخت ربات و پیچیدگی مکانیسم های کنترلی می افزاید.
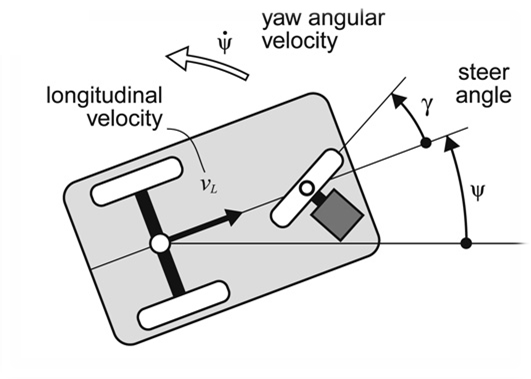
3-2 سیستم کنترلی ۳ چرخ (Tricycle Drive)
برای رباتهای ۳ چرخ میتوان از سیستم کنترل ۳ چرخ نیز استفاده کرد. اگر شما به ساختار یک ۳ چرخه دقت کرده باشید، تا حدی با طراحی آن آشنا هستید. رباتهایی که از این سیستم استفاده میکنند دارای یک چرخ جلوی قابل کنترل هستند که به یک موتور متصل است. دو چرخ عقب نیز به یک محور مشترک متصل شدهاند که توسط یک موتور با ۲ درجه آزادی به حرکت درمی آیند (یا در جهت مستقیم و یا رو به عقب). یکی از نقاط ضعف این سیستم این است که رباتهای ۳ چرخ نمیتوانند مانند رباتهایی که از سیستم کنترل دیفرانسیلی بهره میبرند گردش 90 درجه داشته باشند.
در ضمن رباتهای کمی وجود دارند که هم کنترل و هم حرکت شان وابسته به چرخهای جلوشان باشد و چرخهای عقب تنها برای حفظ تعادل به کار برده شوند، بنابراین بسته به محدودیتهای طراحی ۳ چرخ و نقاط ضعف این سیستم اینگونه طراحی چندان مورد توجه سازندگان ربات نیست.
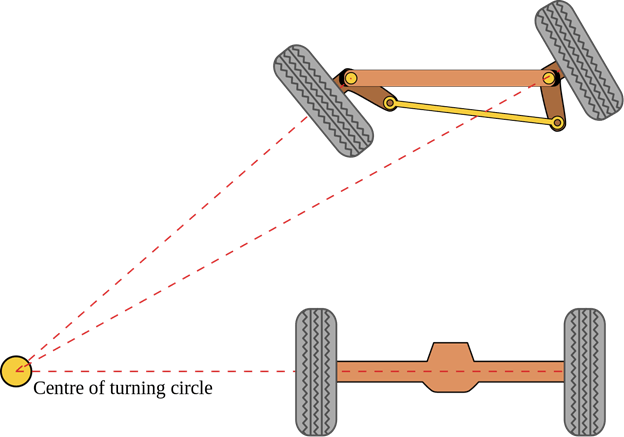
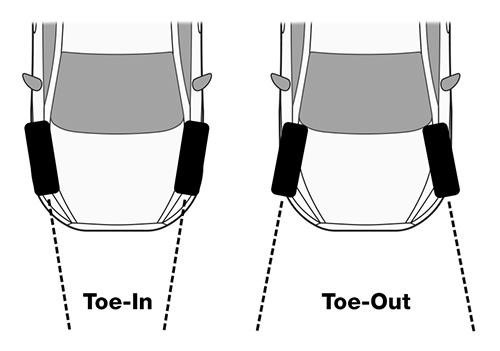
4-2 سیستم کنترل آکرمن (Ackermann Steering)
یکی از محبوبترین پیکربندیها که در سیستم حرکت و کنترل اتومبیل ها نیز به کار برده میشود سیستم کنترل آکرمن میباشد. در این سیستم زاویه چرخ های جلو که توسط یک محور مشترک به یکدیگر متصل هستند توسط فرمان کنترل و از آنها برای تعیین جهت حرکت اتومبیل استفاده میشود، از طرفی چرخهای عقب نیز به موتور متصل هستند و نیروی لازم برای به جلو راندن اتومبیل را از موتور دریافت میکنند.
یکی از نقاط مثبت این شیوه طراحی، افزایش میزان کنترل روی وسیله نقلیه است. همچنین ثبات و روانی حرکت اتومبیل با استفاده از این سیستم تضمین خواهد شد و احتمال سر خوردن به حد قابل ملاحظهای کاهش مییابد که از لحاظ مصرف انرژی نیز مقرون به صرفه تر خواهد بود .
شاید این مدل برای شما تا حد زیادی تداعی کننده مدل ۳ چرخ باشد با این تفاوت که یک چرخ و یک محور به قسمت جلوی وسیله نقلیه افزوده شده اگر در سیستم کنترلی ۳ چرخ یک چرخ به قسمت جلو افزوده شود باعث سر خوردن ربات خواهد شد و به منظور حل این مشکل سیستم آکرمن به گونهای طراحی شده که در حالت دورزدن چرخ داخلی با زاویهای بیشتری از چرخ خارجی انحراف پیدا کند تا از سر خوردن سازه جلوگیری شود.
اگر به یک راه حل هندسی برای جلوگیری از سر خوردن چرخ احتیاج داشته باشیم ، باید هر دو محور وسیله نقلیه را در حال گردش حول یک نقطه ثابت فرض کنیم از آن جایی که چرخ های عقب ثابت هستند نقطهای که گردش حول آن صورت میگیرد باید در راستای محور چرخ های عقب باشد و محور چرخ های جلو نیز به این صورت با این سیستم هم راستا شود که برای نیل به این منظور چرخ جلو داخلی باید با زاویه بیشتری نسبت به چرخ جلو خارجی انحراف پیدا کند.
ربات چهار چرخ مجهز به سیستم کنترل آکرمن
5-2 سیستم کنترل همزمان (Synchronous Drive)
این طراحی برای سطوح صاف بسیار مناسب میباشد چرا که مسیر یابی ربات در این حالت بسیار دقیق خواهد بود. این سیستم کنترل برای رباتهایی که دارای ۳ چرخ یا بیشتر هستن طراحی شده است. تنها نکتهای که باید مد نظر قرار گیرد این است که چرخها باید با هم هماهنگ باشند و با سرعت و در جهت یکسان بچرخند. اگر بر تعداد چرخهای ربات هایی که از این سیستم کنترلی استفاده میکنند افزوده شود طراحی آن پیچیدهتر خواهد شد، بنابراین از این سیستم معمولاً برای ربات های ۳ چرخی که قرار است روی سطوح هموار حرکت کنند استفاده میشود .
ادر این سیستم کنترل تمام چرخها توسط یک محور به یکدیگر متصل و فقط از یک موتور استفاده خواهد شد. این بدان معناست که یک موتور سرعت تمام چرخها را تعیین میکند در این حالت میتوان از یک موتور ثانویه برای چرخاندن تمام چرخ ها حول محور عمودی شان نیز استفاده نمود.
اگر شما تصمیم دارید یک ربات بسازید تا در آشپزخانه دستیار شما باشد، این سیستم طراحی برای شما بسیار مفید و مقرون به صرفه خواهد بود در ضمن ربات RWI B21 نیز از همین سیستم کنترلی استفاده میکند.
RWI’s B21 robot
6-2 سیستم کنترلی همه جهته (Omni Directional Drive)
در رباتهایی که قادر به حرکت در جهتهای مختلف هستند، از چرخهای همه جهته به همراه چرخهای کاستر یا هر نوع چرخ هرزگرد به تنهایی استفاده میشود. چرخهای همه جهته از چرخهای کوچکتری تشکیل شدهاند که آنها را قادر میسازد آزادانه و با سرعت، در جهت دلخواه حرکت کنند. بزرگترین مزیت این چرخها این است که نیازی نیست کل ربات متمایل شود تا گردش در جهت دلخواه صورت بگیرد به عبارتی دیگر، این چرخ ها حالتی هولونومیک را برای ربات فراهم میکنند که باعث میشود بدون تغییر جهت قرارگیری سازه ربات، ربات به سمت دلخواه هدایت شود.
چرخهای همه جهته در انواع متعددی در دسترس میباشند و بر اساس اندازه، قطر، شیوه طراحی و سایز چرخهای کوچکتر دسته بندی میشوند.
رباتهایی که با استفاده از چرخهای همه جهته طراحی میشوند غالباً ۳ چرخ یا ۴ چرخ هستند که هر کدام فواید و مضرات مختص به خودشان را دارند.
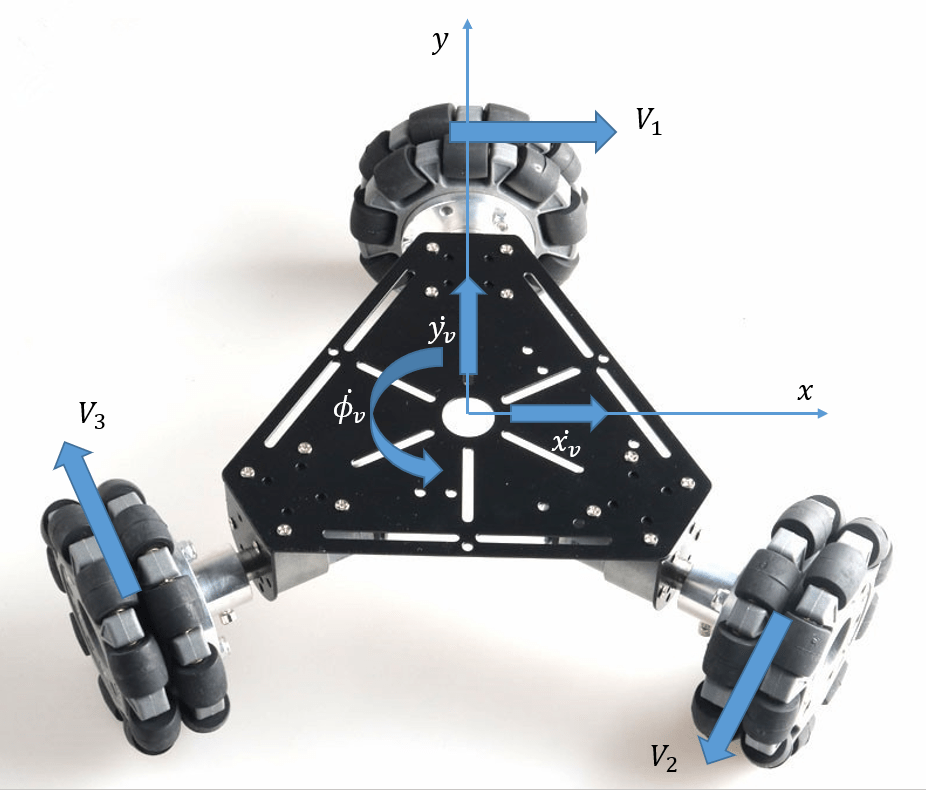
1-6-2 طراحی سه چرخ
در طراحی سه چرخ حرکت ربات راحتتر خواهد بود چرا که نیروی اصطکاک تنها در ۳ نقطه وجود خواهد داشت، علاوه بر این ربات با ۳ چرخ میتواند به خوبی تعادل خودش را حتی در محیطهای صخرهای نیز حفظ کند. همچنین این رباتها در مقایسه با طراحی ۴ چرخ مقرون به صرفه تر هستند ( چرخ های همه جهته گرانقیمتتر از چرخهای استاندارد هستند)، در ضمن طراحی رباتهای ۳ چرخی که از چرخهای همه جهته بهره میبرند سادهتر میباشد و راحتتر میتواند حرکت خود را در مسیر مستقیم حفظ کند. البته برای خیلی از طراحان، طراحی رباتهای ۴ چرخ در اولویت قرار دارد. با وجود این برخی دیگر ترجیح میدهند از طراحی دو چرخ که به صورت موازی در کنار یکدیگر قرار گرفته به همراه یک چرخ عمود بر آنها استفاده کنند و به این ترتیب رباتهای ۳ چرخ را به وجود بیاورند.
البته این طراحی نقاط ضعفی نیز دارد که اولین نقطه ضعف در شیوه قرارگیری چرخها نسبت به یکدیگر دیده میشود در این حالت چرخ ها با زاویه ۱۲۰ درجه نسبت به یک نقطه مرکزی در کنار یکدیگر قرار گرفتهاند، بنابراین تنها یک چرخ به بازده ۱۰۰٪ خواهد رسید به عبارتی دیگر وظیفه کنترل ربات روی دوش یک چرخ میافتد و دو چرخ دیگر، چرخ های آزاد محسوب میشوند که این امر به نوبه خود از سرعت ربات خواهد کاست.
یکی دیگر از نقاط ضعف این طراحی ، این است که محاسبات پیچیدهای برای نحوه حرکت ربات مورد نیاز است چرا که چرخها با یکدیگر در یک راستا قرار ندارند و محاسبات حرکت مربوط به هر چرخ با دیگری تفاوت خواهد داشت.
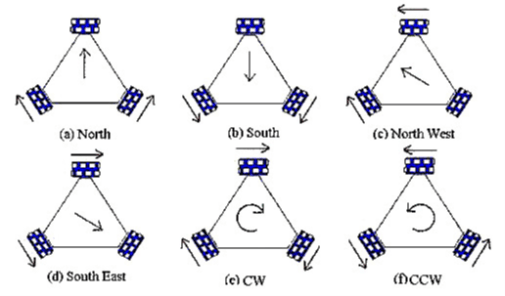
جهتهای حرکت ربات دارای سه چرخ همه جهته
2-6-2 طراحی چهار چرخ
در این شیوه طراحی، ۴ چرخ همه جهته با زوایه ۹۰ درجه نسبت به یک نقطه مرکزی در کنار یکدیگر قرار گرفتهاند، و این بدان معناست که چرخها ۲ به ۲ با یکدیگر موازی و نسبت به دو چرخ دیگر عمود هستند. اولین و مهمترین مزیت استفاده از این سیستم این است که محاسبات حرکتی نسبت به طراحی ۳ چرخ بسیار ساده میباشد. از آن جایی که دو جفت چرخ در این طراحی موجود میباشد و هر جفت محاسبات مخصوص به خودش را دارد ، به جای ۳ محاسبهی حرکتی (در رباتهای ۳ چرخ)، تنها به ۲ محاسبه نیاز خواهد بود در ضمن در هر شرایطی ۲ چرخ آزاد و ۲ چرخ متحرک وجود خواهد داشت.
بنابراین در اینگونه رباتها به دلیل وجود ۲ چرخ دارای ۱۰۰٪ کارایی، سرعت ربات همواره بیشتر از طراحی سه چرخ با صرفا یک چرخ با کارایی بیشینه خواهد بود.
تنها نقطه ضعف رباتهای ۴ چرخ نسبت به رباتهای ۳ چرخ این است که نمیتوانند در نواحی ناهموار تعادل خود را به خوبی حفظ کنند چرا که ممکن است تماس برخی چرخها با زمین قطع شود یا چرخهایی که با یکدیگر جفت هستند روی یک سطح قرار نگیرند، در ضمن اگر بخواهیم برای حل این مشکل به اضافه کردن چرخ دیگری متوسل شویم، هزینه ی طراحی خود را بالا برده ایم که البته در برخی موارد ممکن است مشکل چندان جدیای به نظر نرسد.
به طور کلی رباتهای ۳ چرخ و ۴ چرخی که از چرخهای همه جهته استفاده میکنند، برای عملکرد بینقص نیاز به حداقل دو موتور خواهند داشت البته گاهی برای بالا بردن کارایی ربات از ۳ یا ۴ موتور نیز استفاده میشود. به هر حال با وجود نقاط ضعفی که رباتهای ۳ چرخ همه جهته نسبت به نوع ۴ چرخ آن دارند، برخی سازندگان طراحی ۳ چرخ را ترجیح میدهند.
۱) معمولاً چرخهای همه جهته، هزینه بیشتری نسبت به چرخهای استاندارد دارند.
۲) چرخهای آزاد باعث کاهش کارایی ربات میشود (چرخهای آزاد چرخهایی هستند که از آنها برای کنترل یا پیش بردن ربات استفاده نمیشود)
۳) چرخهای همه جهته، از چندین چرخ غلطکی کوچک تشکیل شدهاند. در این نوع طراحی مقاومت چرخ برای حرکت افزایش مییابد و در نتیجه به انرژی بیشتری برای به جلو راندن ربات نیاز خواهد بود تا بر اصطکاک غلبه کند.
۴) از آن جایی که رباتهای دارای چرخ همه جهته بر اساس حرکت لغزشی کار میکنند کنترل در برخی مواقع دشوار خواهد بود.
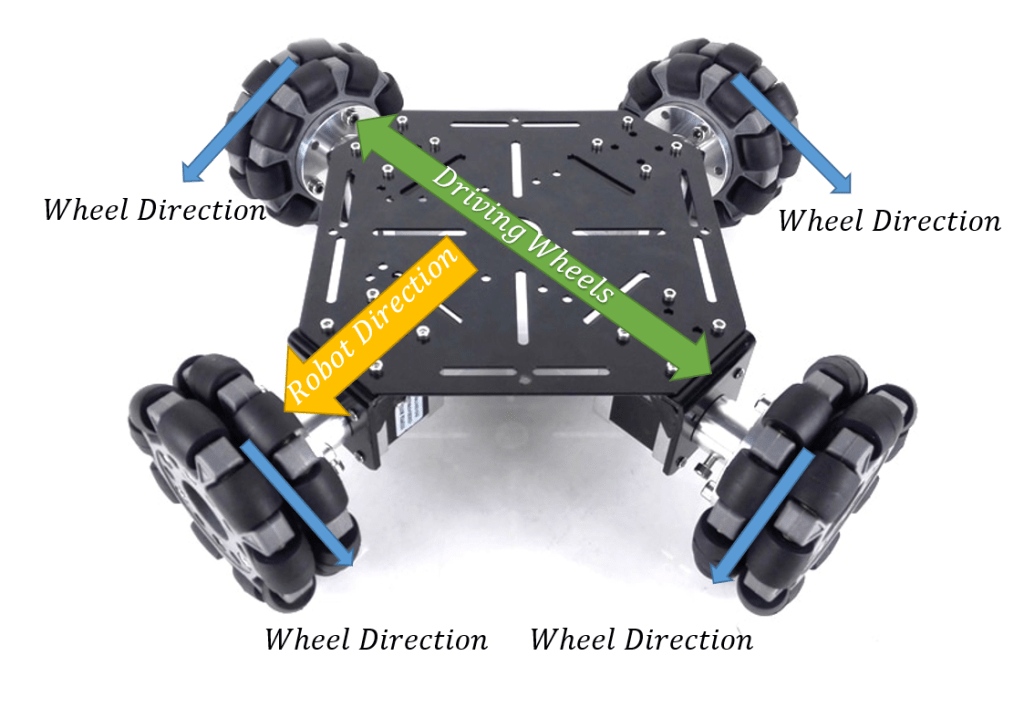
جهتهای حرکت ربات دارای چهار چرخ همه جهته
7-2 سیستم کنترل مفصلی (Articulated Drive)
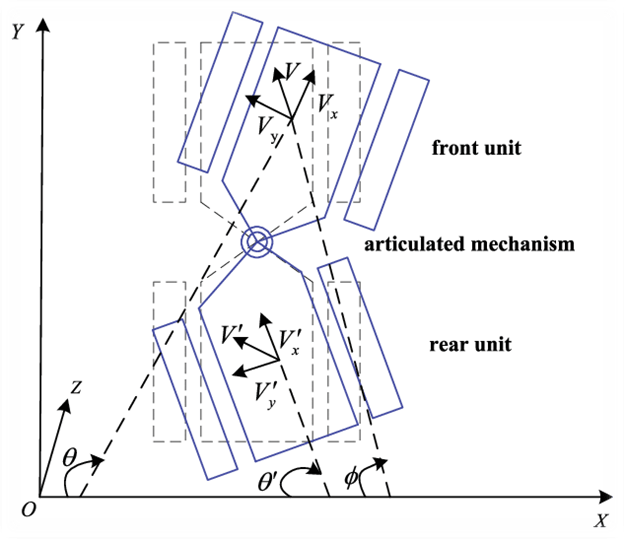
این سیستم تا حد زیادی به سیستم آکرمن شباهت دارد. در این متد فریم اصلی ربات برای چرخش به دو نیم تقسیم میشود، درواقع چرخها در تغییر جهت وسیله نقلیه نقشی ندارند. از این روش معمولا برای طراحی رباتهای صنعتی استفاده میشود. در این حالت، یک ربات ۴ چرخ به دو بخش تقسیم میشود بخش ابتدایی و بخش انتهایی که توسط یک لولا یا مفصل عمودی به یکدیگر متصل شدهاند. یک موتور یا سیستم هیدرولیک زاویه قسمت ابتدایی را به جهت دلخواه تغییر میدهد و از یک موتور دیگر به عنوان پیشران استفاده میشود. البته این نوع طراحی بسیار پیچیده است و محاسبات دقیق برای سیستم هیدرولیک یا ساختار موتورها ضروری میباشد، اما کارایی آن در رباتهای فوق سنگینی که کند حرکت میکنند به اثبات رسیده است. از آن جایی که وظیفه کنترل جهت ربات به عهده مفصلی که در مرکز فریم قرار گرفته میباشد، به این روش کنترل مفصلی اطلاع میشود.
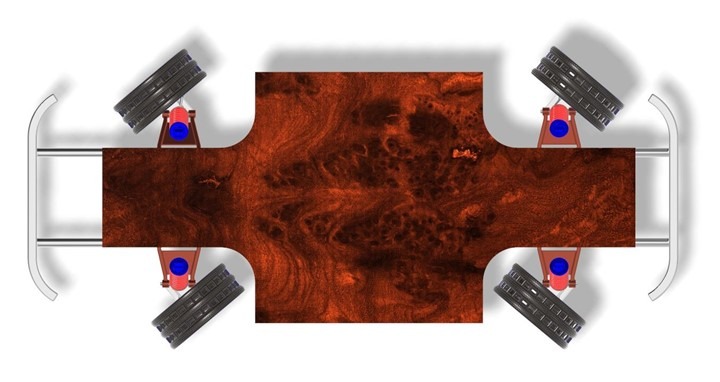
8-2 سیستم کنترل مستقل (Independent Drive)
در این روش، هر چرخ به صورت جداگانه و مستقل کنترل خواهد شد. البته در این روش هماهنگی بین چرخها دشوار میباشد، چرا که هر چرخ میخواهد به یک سمت برود و با سرعت مخصوص به خودش حرکت کند. اگر طراح از ایجاد هماهنگی بین چرخ ها بازبماند، راه اندازی سیستم هدفمند دچار مشکل خواهد شد و در نتیجه ربات قادر به حرکت درست نخواهد بود، اما در صورت ایجاد هماهنگی بین چرخها ، این روش بهترین روش برای طراحی رباتهایی است که باید روی سطوح ناهموار یا ناشناخته حرکت کنند. در این روش حتی اگر یکی از چرخها گیر کند، بقیه چرخها قادر خواهند بود ربات را به جهت و موقعیت دلخواه هدایت کنند. از این سیستم کنترلی میتوان برای ساخت رباتهای پادار نیز استفاده نمود، که هر کدام از پاهای ربات به صورت مستقل کنترل میشود و میتواند در جهت و با سرعتی متفاوت از دیگر پاهای ربات حرکت کند.
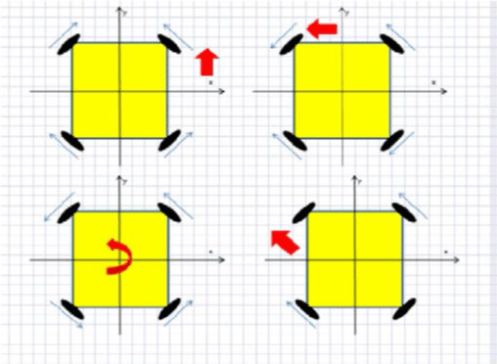
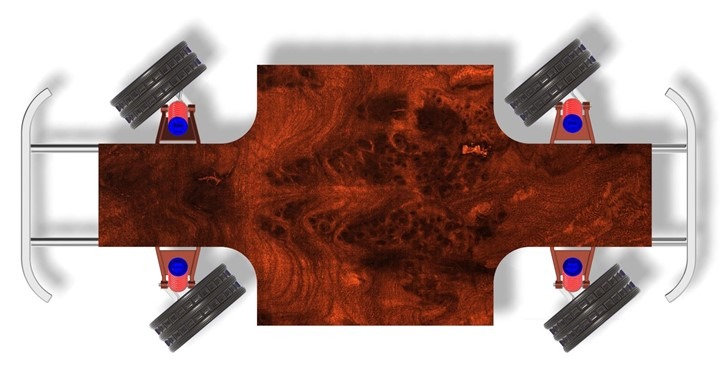
در حالت استاندارد چرخهای انتهایی در جهت مخالف چرخهای ابتدایی میچرخند که این امر زاویه چرخش را محدود میکند و باعث کنترل دقیقتر ربات میشود.
در حالت دوم، زاویه چرخش چرخهای عقب با چرخهای جلو یکسان میباشد در این حالت، شما بدون تغییر جهت سازه ربات میتوانید به شانه مسیر متمایل شوید.
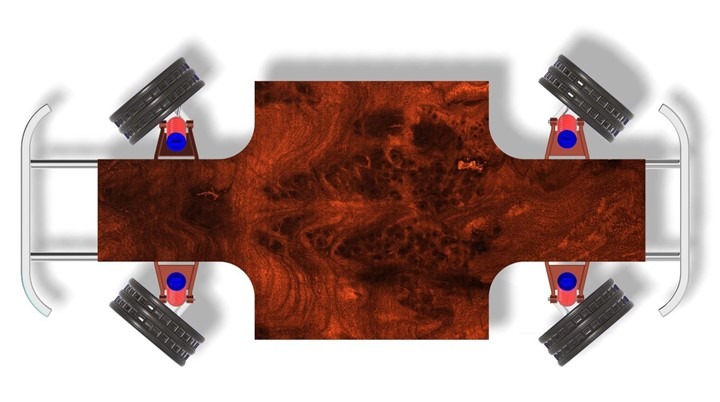
در حالت سوم از مکانیسم کنترلی سطح صفر (Zero Steer) استفاده میشود این مکانیسم هر ۴ چرخ را به سمت داخل متمایل میکند این حالت شعاع چرخش ربات را به صفر خواهد رساند، به عبارتی دیگر ربات یا وسیله نقلیه در جا خواهد چرخید.
3- انتخاب تکنیک کنترلی درست و مناسب برای ربات
اگر شما در ساخت ربات مبتدی هستید، بهتر است با طراحی رباتهای ۳ چرخ یا ۴ چرخ دیفرانسیلی کارتان را آغاز کنید و پس از ساختن ۲ الی ۳ ربات، تکنیکهای کنترلی دیگری را بسته به محیطی که ربات قرار است در آن فعالیت کند اتخاذ کنید.