ربات های چرخ دار یکی از انواع پرطرفدار و پرکاربرد در طراحی ربات هستند، چرا که فواید زیادی از جمله ساختار ساده ، بازده انرژی و سرعت بالا ، هزینه ساخت پایین و دارای بسیاری دیگر از ویژگیهای مفید میباشند.
هدف این مقاله، ارائه توضیحات کلی در مورد طراحیهای متداول ربات های چرخ دار، همچنین ارزیابی ویژگیهای مدلهای مختلف و شرح سیستمهای تعلیق شان (Suspension System) خواهد بود.
ربات های چرخ دار رباتهایی هستند که میتوانند به وسیله چرخهایی که به موتور متصل هستند به راحتی روی زمین حرکت کنند طراحی رباتهای چرخدار خیلی راحتتر از رباتهای دارای پا میباشد در ضمن ساخت، برنامهریزی و کنترل آنها نیز سادهتر است.
اما اینگونه رباتها دارای معایبی نیز هستند از جمله اینکه نمیتوانند از روی موانع بپرند و در مناطق صخرهای، دارای شیب زیاد و اصطکاک کم ناکارآمد هستند.
اکثر ربات های چرخ دار از کنترل دیفرانسیلی (Differential Steering) بهره میبرند که در این حالت هر کدام از چرخها به صورت جداگانه کنترل میشود، این ویژگی به ربات کمک میکند تا به راحتی جهت حرکت را به وسیله چرخاندن هر چرخ با سرعتهای متفاوت تغییر دهد، همچنین رباتهایی با بیش از ۴ چرخ وجود دارند که برخی از چرخهایشان به موتور متصل نیست (چرخ هرزگرد) که صرفا جهت حفظ تعادل به سیستم اضافه شدهاند.
مزایای ربات چرخدار
ربات مدل 3E-D18 ( ربات هوشمند هوندا ) یک ربات اتوماتیک آفرود است که برای اهداف متفاوتی طراحی و ساخته شده. اتصال قسمت بالای آن قابل تعویض است تا قادر باشد وظایف زیادی از جمله کمک به آتش نشان ها، کارهای مربوط به کشاورزی و کمک در انجام تمرینهای ورزشی را به انجام برساند، همچنین قابلیتهای آفرود این ربات به آن اجازه میدهد که در مزارع و کوهستان ها به سهولت رفت و آمد کند.
چرخها در دانش رباتیک کاربردهای فراوانی دارند و یکی از اجزای اساسی آن به شمار میروند که حرکت ربات را با کاهش اصطکاک میسر خواهند کرد. اکثر ربات ها با ۳ چرخ ، ۲ موتور و ۲ کنترل کننده سرعت طراحی میشوند، این طراحی ربات را قادر به حرکت سریع، کنترل آسان، چرخیدن در جا و دور زدن در فضاهای باریک میکند.
به صورت کلی در رباتیک از چرخ برای نیل به اهداف زیر استفاده میشود:
ــ هزینه ساخت پایین:
اگر شما قیمت چرخ را با ریل و ادوات مربوط به ساخت آن مقایسه کنید، متوجه اختلاف فاحش آنها خواهید شد.
ــ سرعت:
در مقایسه با ریل، چرخها نیاز به صرف انرژی کمتری برای چرخیدن دارند.
ــ قابلیت تغییر جهت:
تغییر جهت چرخها خیلی راحتتر از تغییر جهت ربات توسط ریل است، تغییر جهت در رباتهایی که برای حرکتشان از ریل استفاده میکنند بسیار سخت و پیچیده است.
ــ سبکی:
ریلها فوقالعاده سنگینتر از چرخها هستند، به همین دلیل هنگامی که کم بودن وزن ربات یکی از فاکتورهای اساسی در طراحی آن محسوب میشود از چرخ استفاده خواهد شد به عنوان مثال در عملیات کاوش فضایی، سبک بودن ربات از اهمیت ویژهای برخوردار است.
ــ سادگی:
چرخ قسمتهای متحرک کمتری دارد و این بدان معناست که اصطکاک کمتری ناشی از ساییدگی قطعات به یکدیگر به وجود خواهد آمد و در نتیجه میزان استهلاک قطعات نیز کمتر خواهد بود.
ــ مواد به کار رفته:
مواد متفاوتی میتواند برای ساخت چرخها به کار رود که با شرایط زیست محیطی مطابقت داشته باشد اما در ساخت ریلها انتخاب محدود است.
انواع ربات چرخ دار
در ربات های چرخ دار به منظور دستیابی به حرکت دلخواه، از چرخ استفاده میشود. به طور کلی رباتهای چرخدار انرژی کمتری مصرف میکنند و سرعت حرکت آنها از دیگر مکانیزمهای حرکتی مانند پا و ریل بیشتر خواهد بود، همچنین کنترل آنها راحتتر میباشد.
با وجود اینکه کنترل و حرکت رباتهای چرخ دار در زمینهای ناهموار بسیار سخت میباشد، اینگونه رباتها با بسیاری از شرایط گوناگون همخوانی دارند به هر حال در هنگام طراحی ربات دو گزینه پیش روی ما قرار دارد استفاده از چرخهای استاندارد یا استفاده از چرخ های مخصوص.
یک چرخ استاندارد مانند یک تایر معمولی است اما چرخهای مخصوص دارای ویژگیها و ساختار مکانیکی منحصر به فردی هستند که شامل گویها و ادوات دوار خواهد بود.
مسائلی که در طراحی رباتها با بدنه یکپارچه مطرح است شامل انتخاب نوع چرخها، محل جایگذاری آنها و تعیین پارامترهای سینماتیک (Kinematic Parameters) میشود، همچنین در طراحی باید کاربرد ربات و محیطی که باید در آن قرار بگیرد، لحاظ شود در ادامه این مقاله رباتها بر اساس تعداد چرخها و دیگر ویژگیهایشان طبقه بندی خواهند شد.
ربات تک چرخ
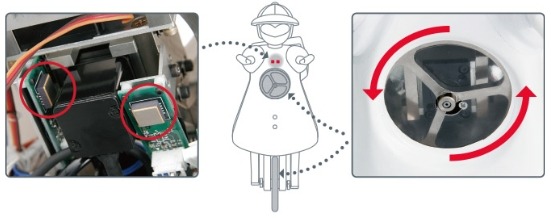
ربات دختر موراتا (Murata Girl) میتواند به کمک یک دیسک چرخان که داخل شکمش تعبیه شده و پدال هایی که در زیر پایش قرار دارد تعادلش را روی تنها یک چرخ حفظ کند و سر جایش بایستد.
در پشت ربات دختر موراتا ۲ عدد سنسور ژیروسکوپ قرار دارد که میتواند انحراف بدن او به جلو و عقب یا راست و چپ را احساس کند سپس با کمک دیسک چرخان داخل شکمش انحرافات به سمت چپ و یا راست را خنثی خواهد کرد، و با حرکت پدالهایش به تدریج و بدون اینکه به زمین بخورد در جهتهای مختلف حرکت میکند.
البته حفظ تعادل رباتهای تک چرخ به دلیل سطح تماس کم با زمین بسیار دشوار است، با وجود این رباتهای تک چرخ زیادی طراحی و تولید شدهاند.
رباتهای تک چرخ دارای چرخهای کروی، نسبت به رباتهای تک چرخی که از چرخ دیسکی استفاده میکنند در حفظ تعادل خود موفق تر خواهند بود چرا که رباتها با چرخ کروی قادرند به راحتی مسیر حرکت خود را تغییر دهند.
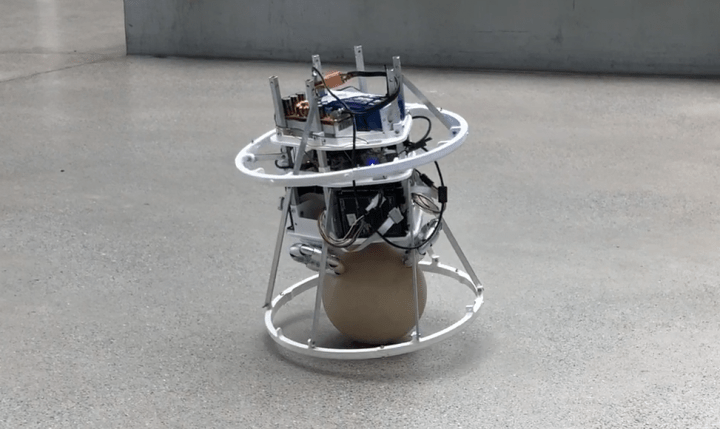
در شکل بعدی گونهی دیگری از رباتهای تک چرخ نشان داده شده است.
رباتی که در تصویر مشاهده میکنید بال بات (ball bot) نام دارد که به وسیله ژیروسکوپ و حرکت دوار دو حلقهای که در زیر و قسمت بالایی ربات تعبیه شدهاند تعادلش را حفظ میکند ( به منظور حفظ تعادل حلقهها در جهت مخالف و با سرعت متفاوتی می چرخند.)
بهترین روش جهت طراحی رباتهای تک چرخ این است که یک چرخ دیگر به آن اضافه شود و آنها طوری روی هم سوار شوند که نسبت به هم عمود باشند به این صورت که چرخی که روی زمین قرار گرفته است مسئولیت ایجاد تعادل در جهت y و z و چرخ دیگر که در بالا قرار گرفته تعادل در جهت x و z را حفظ کند. هر چند که توضیح این ساختار راحت میباشد پیاده سازی و عملیاتی کردن آن در عمل بسیار سخت و پیچیده خواهد بود، اما در صورت تحقق، حرکتی بسیار نرم و روان را به ارمغان میآورد به هر حال از رباتهای تک چرخ به ندرت استفاده میشود چرا که نیاز به مکانیسمهای تعادلی فوقالعاده پیچیدهای دارند و کنترل آنها نیز دشوار است.
Ballbot یک ربات همه جهته با باتری است که به صورت دینامیکی خود را روی یک کره فلزی با پوشش urethane متعادل می کند. ربات روی یک توپ وارونه است که باعث می شود بتواند در هر جهت حرکت کند.
ربات دو چرخ
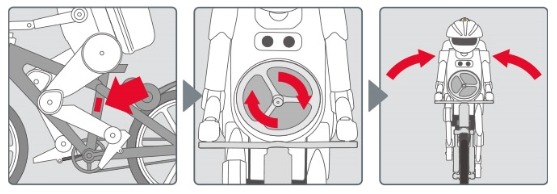
پسر موراتا یک ربات سوار یک دوچرخه است. او میتواند حتی در حالت کاملاً ایستاده نیز تعادلش را حفظ کند، همچنین میتواند به وسیله دوچرخهاش از شیبها بالا برود یا از مسیرهای فوقالعاده باریک عبور کند. سنسورهای فراصوت به او کمک میکنند تا با موانع برخورد نکند او حتی قادر است از شیبهای ۲۵ درجه نیز به راحتی بالا برود.
راز موفقیت او در حفظ تعادلش در بهره گیری از ژیروسکوپی است که در زیر زین دوچرخهاش جای گرفته است. سنسورهای ژیرو به راحتی کوچکترین انحراف و کج شدگی را تشخیص میدهند همچنین نیرویی که برای خنثی کردن انحراف به کار میرود از طریق دیسک چرخنده ای که در سینه ی پسر موراتا جای گرفته تأمین میشود.
به طور کلی ، دو نوع ربات دو چرخ وجود دارد:
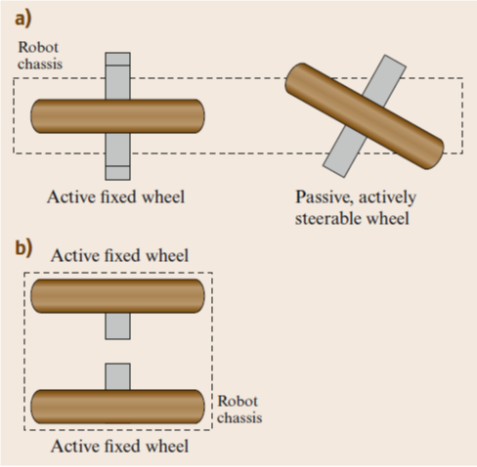
ــ چرخها به موازات یکدیگر قرار گرفته باشند.
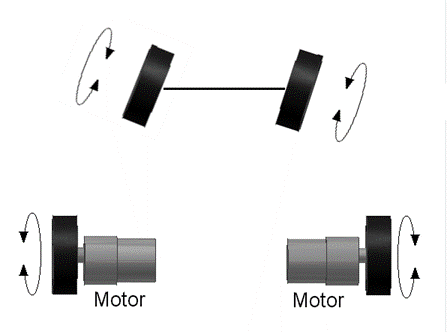
ــ چرخها به صورت سری به ربات متصل شده باشند.
شکل a یک ربات با اتصال سری چرخها را نمایش میدهد. به طور کلی طراحی رباتهای دو چرخ سری به صورتی که چرخ جلو مسئول فرمان دهی ربات و چرخ عقب فعال باشد مرسومتر از مدل موازی است. از آن جایی که پایداری دینامیک یک ربات سوار بر دوچرخه با افزایش سرعت آن نسبت مستقیم دارد استفاده از مکانیزمهای تعادلی چندان ضروری نیست، مزیت این طراحی این است که عرض ربات میتواند کاهش یابد. با این حال رباتهای دو چرخ سری نقطه ضعفهایی نیز دارند از جمله اینکه در حالت سکون حفظ تعادل آنها سخت و نیازمند محاسبات پیچیده خواهد بود.
شکل b یک ربات پاندولی معکوس را نشان میدهد که دارای دو دیفرانسیل است دستیابی به پایداری استاتیکی (سکون) با قرار دادن دقیق مرکز ثقل روی محور چرخها امکان پذیر خواهند بود. معمولاً این کار با نصب باتریها در زیر بدنه انجام می شود.
امروزه طراحی و ساخت ربات های دو چرخ رونق زیادی گرفته چرا که طراحی مقرون به صرفه ای دارند. طراحی این رباتها تنها با استفاده از دو چرخ و چند موتور میسر میشود. با وجود این نمیتوان از نقاط ضعف آنها چشمپوشی کرد از جمله اینکه آنها برای حفظ تعادل شان نیاز دارند که مدام در حرکت باشند به عبارتی دیگر آنها برای حفظ تعادل خودشان را به مخالف جهتی که به آن متمایل شدهاند حرکت میدهند در ضمن مرکز ثقل اینگونه رباتها باید بخش زیرین آنها باشد .
همچنین برای رباتی که چرخهایش در سمت راست و چپ واقع شده حداقل دو سنسور نیاز است. یک سنسور سنجش شیب جهت محاسبه زاویهی انحراف و یک انکودر جهت ردیابی موقعیت کنونی ربات.
در این حالت به ۴ مولفه برای تعیین حرکت و موقعیت ربات نیاز است تا تعادل ربات حفظ شود.
۱) زاویه کج شدگی
۲) سرعت زاویهای
۳) وضعیت فعلی چرخها
۴) سرعت اولیه
ربات سه چرخ
از آن جایی که رباتهای سه چرخ به راحتی میتوانند تعادل خود را حفظ کنند و معمولا نیاز به طراحی پیچیده سازه ندارند، یکی از پر استفاده ترین رباتهای چرخ دار هستند. بر اساس نوع چرخ میتوان طراحیهای فوقالعاده متنوعی را برای اینگونه رباتها در نظر گرفت، که در اینجا ۵ طراحی پرطرفدار و معمول ذکر و بررسی خواهد شد:
۱) رباتهای ۳ چرخ، دو چرخ متحرک (Two-wheel differential drive).
۲) رباتهای ۳ چرخی که هر ۳ چرخ آن همواره در یک جهت حرکت میکنند (Synchronous drive).
۳) رباتهایی که قادر هستند در تمام جهات حرکت کنند و دارای چرخهای سوئدی هستند (An Omni mobile robot with Swedish wheels).
۴) رباتهایی که قادر هستند در تمام جهات حرکت کنند و دارای چرخهای کاستر هستند (An Omni mobile robot with active caster wheels).
۵) رباتهایی که قادر هستند در تمام جهتها حرکت کنند و از چرخ های steerable استفاده میکنند (An omnidirectional robot with steerable wheels).
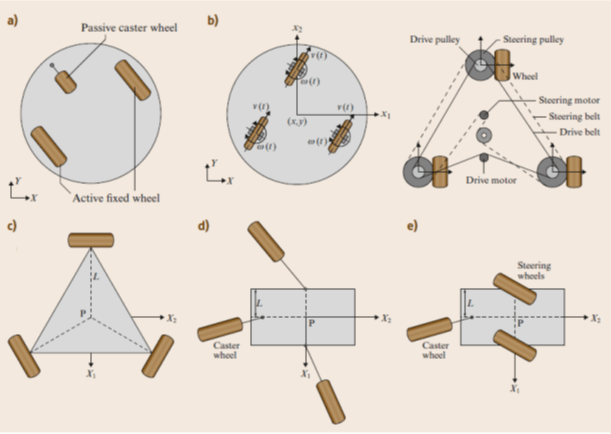
انواع رباتهای ۳ چرخ
a) Two-wheel differential drive, (b) Synchronous drive, (c) Omni mobile robot with Swedish wheels, (d) Omni mobile robot with active caster wheels, and (e) omnidirectional robot with steerable wheels
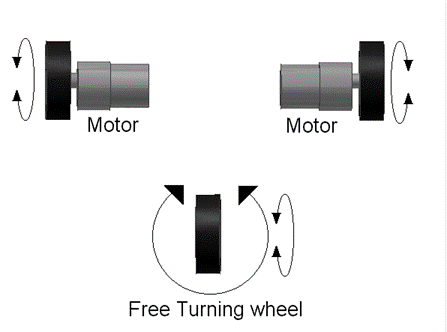
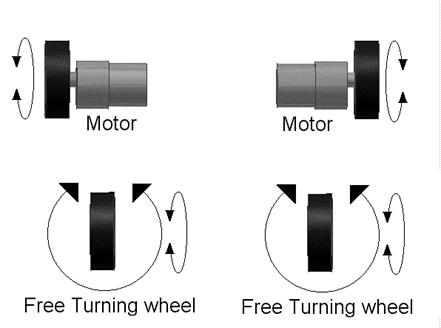
1) رباتهای ۳ چرخ، دو چرخ متحرک (Two-wheel differential drive)
رباتهای دو چرخ دیفرانسیل یکی از محبوبترین طراحیها در زمینه رباتیک میباشد در این طراحی دوچرخ به موتور متصل شده و یک چرخ آزاد وجود دارد. در این طراحی با تغییر نرخ نسبی سرعت چرخش چرخهایی که دارای فرمان دیفرانسیل هستند، جهت ربات تغییر خواهد کرد. حرکت مستقیم زمانی حاصل میشود که هر دو چرخ متحرک در یک جهت و با سرعت یکسان حرکت کنند. مرکز ثقل اینگونه رباتها در مرکز مثلثی قرار دارد که اگر چرخها را با ۳ خط به هم متصل کنیم شکل میگیرد، درصورتی که جرم بیش از حد سنگین در کنار چرخ آزاد ربات نصب شود ربات واژگون خواهد شد. امکان تبدیل این ربات با افزودن یک چرخ آزاد دیگر به ربات 4 چرخ نیز وجود دارد. از جمله مزایای این طراحی:
ـ ساختار مکانیکی ساده، مدل سینماتیک راحت و هزینه ساخت پایین.
ـ ربات قادر خواهد بود که درجا بچرخد (شعاع چرخش صفر).
ـ مشکلات حرکتی به راحتی قابل اصلاح هستند.
از طرفی دیگر این طراحی دارای نقاط ضعفی هم میباشد. از جمله:
ـ ربات نمیتواند روی سطوح ناهموار به خوبی حرکت کند چرا که اگر یکی از چرخ هایی که به موتور متصل است تماس خود با زمین را از دست دهد ممکن است به طور ناخواسته جهت حرکت ربات تغییر کند.
2) رباتهای سنکرون (Synchronous-Drive Robot)
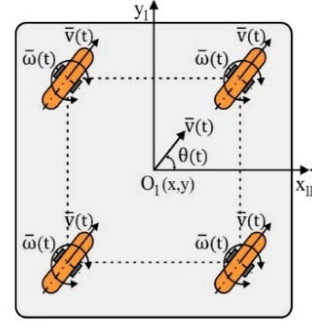
در اینگونه رباتها تمام چرخها در یک جهت می چرخند و حرکات فرمان هر چرخ به صورت مکانیکی توسط زنجیر و یا تسمه جفت خواهند شد. بنایراین حرکت در جهات مختلف با هدایت همه چرخها به سمت مقصد میسر خواهد شد. با این حال جهت شاسی ربات را نمیتوان تغییر داد هر چند این مشکل با افزودن مکانیزمهای اضافی قابل برطرف شدن خواهد بود. مهمترین مزیت این طراحی، این است که حرکت همه جهته تنها با دو عملگر (actuators) قابل دستیابی است. در ضمن از آن جایی که تمام چرخها با یکدیگر هم جهت هستند ربات کنترل حرکت سادهتری دارد به علاوه جمع آوری اطلاعات از سنسورهای حرکتی به منظور ارزیابی موقعیت و شیوه حرکت ربات راحتتر و دقیقتر خواهد بود و همچنین نیروهای پیشران به صورت یکسان و مساوی بین تمام چرخها توزیع خواهد شد.
از جمله نقاط ضعف اینگونه طراحی:
ــ ساختار مکانیکی پیچیده
– اشکال در اتصالات زنجیر و گیربکس ممکن است باعث اختلاف سرعت بین چرخها شود.
– به منظور دستیابی به حرکت همه جهته، جهتگیری چرخها باید قبل از حرکت در جهت سرعت مورد نظر، به دلیل محدودیتهای سرعت غیرهولونومیک (nonholonomic)، تراز شوند.
پیکر بندی رباتهای Synchronous Drive
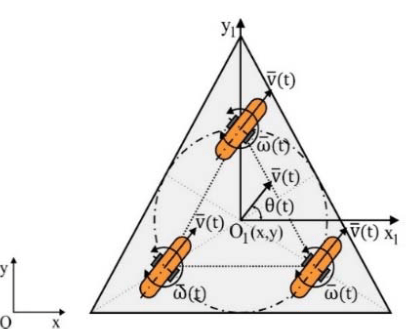
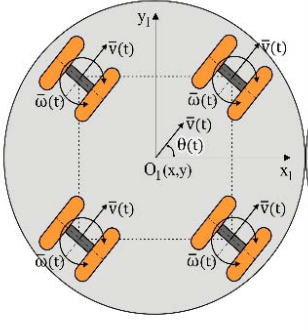
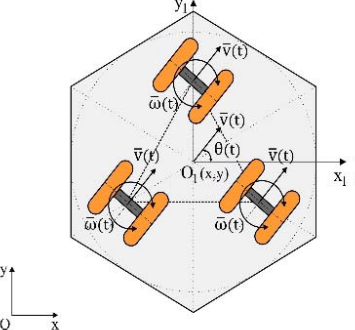
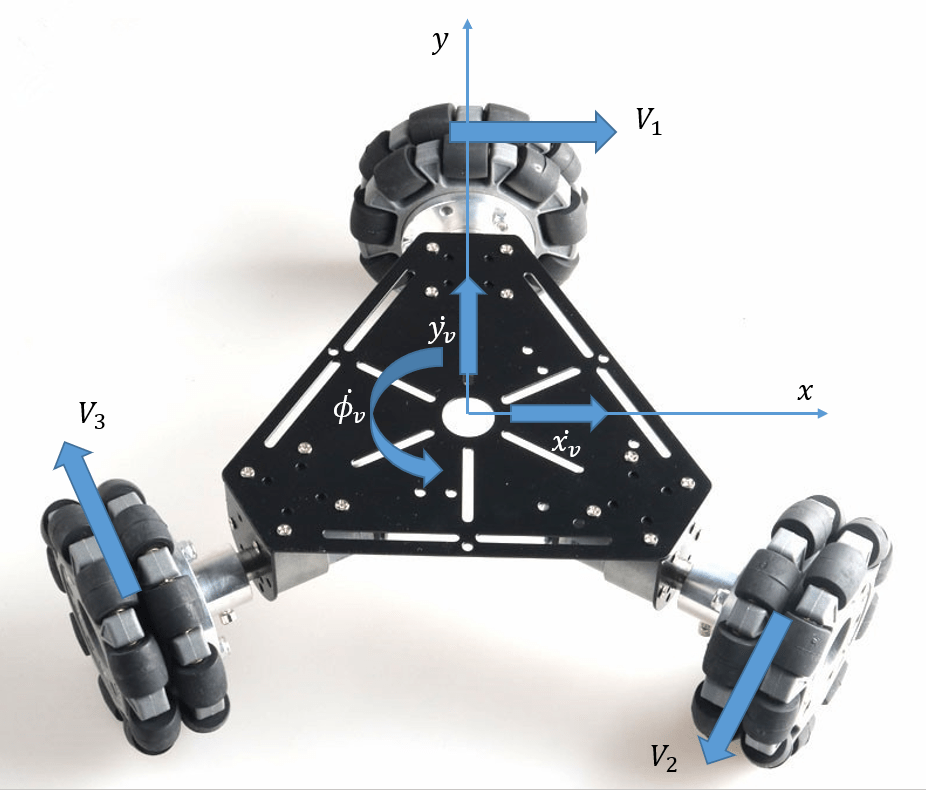
3) رباتهای دارای چرخ سوئدی
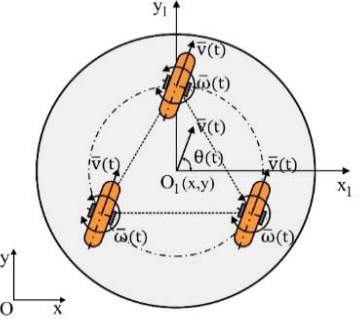
یکی دیگر از راههای طراحی رباتهای چرخ دار استفاده از چرخهای همه جهته (omni) است که روی آنها چرخهای کوچکی تعبیه شده است، این چرخهای کوچک در زاویه ۹۰ درجه نسبت به جهت چرخ مرکزی قرار گرفتهاند و به این صورت ربات را قادر می سازند تا در دو جهت حرکت کند، همچنین ربات قادر به حرکت هولونومیکی (holonomically) خواهد بود، به عبارت دیگر ربات میتواند فورا در هر جهتی تغییر مسیر دهد. برخلاف اتومبیلها که تنها در حال حرکت میتوانند جهت بدنه اصلی خود را تغییر دهند اینگونه رباتها قادر هستند جهت قرارگیری خود را بدون حرکت رو به جلو یا عقب تغییر دهند.
بزرگترین مزیت طراحی اینگونه چرخها این است که محاسبات مربوط به حرکت گردشی از حرکت رو به عقب یا جلو جدا شده. حداقل سه چرخ سوئدی برای ساخت یک ربات همه جهته هولونومیک لازم است.
در ضمن ساختار مکانیکی قطعات متحرک این ربات ها بسیار ساده است با این حال طراحی چرخ های مناسب برای این ربات ها کمی پیچیده به نظر میرسد. یکی از نقاط ضعف چرخهای سوئدی این است که در حال حرکت، در جهت عمودی مقداری لرزش وجود دارد که ناشی از قطع و وصل شدن اتصال چرخهای دیسکی کوچک با زمین میباشد یکی دیگر از مضرات استفاده از این نوع چرخ ها این است که به سرعت مستهلک میشوند و دوام آنها در مقایسه با چرخهای معمولی کمتر است.
ربات همه جهته با سه چرخ omni
4) رباتهای دارای چرخ کاستر
یک ربات همه جهته هولونومی را می توان با استفاده از حداقل دو چرخ کاستر فعال طراحی کرد. ربات را میتوان جهت تولید سرعتهای خطی و زاویه ای دلخواه بدون توجه به جهت چرخها کنترل کرد. از طرفی با توجه به این که ربات از چرخهای معمولی استفاده می کند، معایب چرخهای سوئدی، به عنوان مثال، لرزشهای عمودی یا مشکلات دوام را می توان حل کرد. معایب این ربات را می توان به صورت زیر خلاصه کرد:
– از آنجایی که محل تماس با زمین نسبت به طراحی شاسی ربات تغییر می کند، ناپایداری می تواند زمانی رخ دهد که فاصله بین چرخ ها خیلی کم باشد.
– در صورتی که ربات حرکت خود را در جهت معکوس تغییر دهد، تغییر ناگهانی جهت چرخ ها ممکن است به وقوع بپیوندد که در این صورت موتور نیاز به صرف انرژی زیادی برای تولید نیروی پیشران مورد نیاز ربات خواهد داشت .
– اگر یک ربات مجهز به بیش از دو ماژول چرخ کاستور فعال باشد، از بیش از چهار عملگر استفاده می شود. از آنجایی که حداقل تعداد محرک برای دستیابی به حرکت همه جهته هولونومیک سه است، این یک سیستم بیش فعال است. بنابراین، عملگرها باید به طور دقیق به صورت همزمان کنترل شوند.
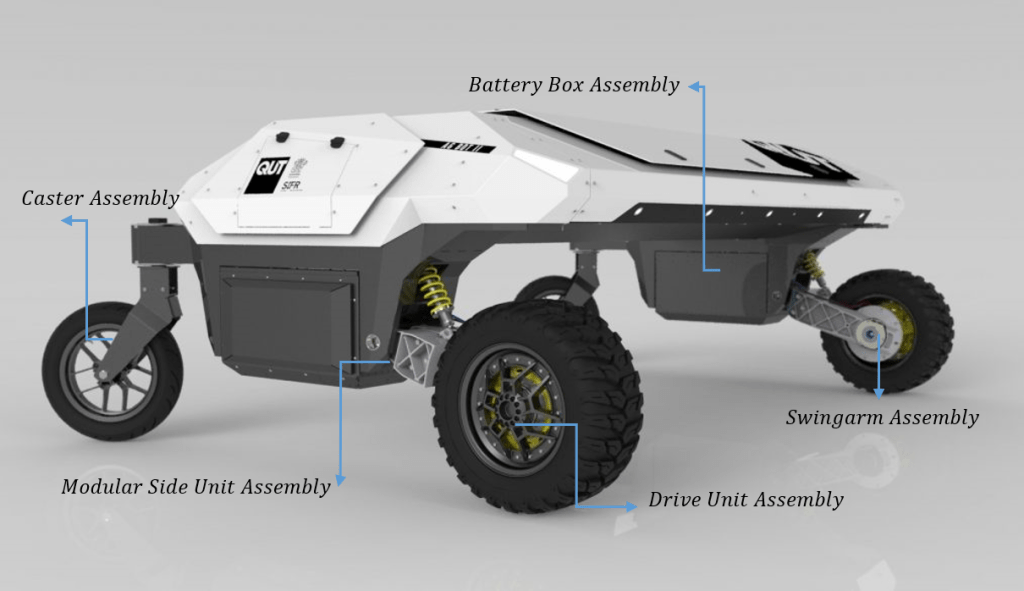
پلتفرم ربات AgBotII و قسمتهای اصلی ربات
5) رباتهای دارای چرخ فعال steerable
چرخهای (Centered orientable wheels) که قابلیت چرخش در ۳۶۰ درجه را در راستای محور عبوری از مرکز چرخ دارند در ساخت رباتهای چرخ دار کاربرد فراوانی دارند. جهت طراحی رباتهایی که از اینگونه چرخ ها استفاده میکنند حداقل دو ماژول مورد نیاز است. یک تفاوت قابل توجه بین چرخ کاستور فعال (active caster wheel) (محور چرخش چرخ از مرکز چرخ نمیگذرد) و چرخهایی که محور چرخش از وسط چرخ عبور میکند (Centered orientable wheel) در این است که جهت چرخ باید همیشه با جهت سرعت مورد نظر مطابق با سینماتیک معکوس باشد. این واقعیت نشان میدهد که این ربات غیرهولونومیک و همه جهته است.
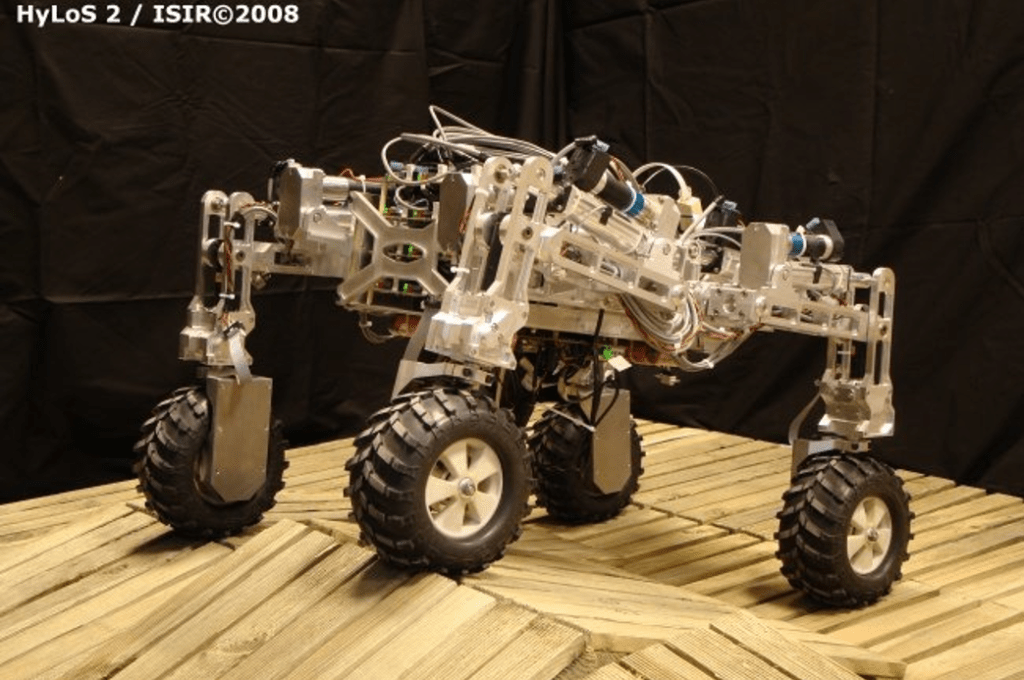
طراحی ربات با این نوع چرخها چند نقطه ضعف مکانیکی دارد چرا که به قطعات کنترل کننده و ساختار مکانیکی پیچیدهای نیاز است و از آن جایی که در اکثر اینگونه رباتها موتور مستقیماً به محور چرخها بسته میشود حرکت ربات تا حدی محدود خواهد شد تا از پیچیدن سیمها به یکدیگر جلوگیری شود. همچنین در طراحی میتوان از چرخهای هرزگرد نیز بهره گرفت اما برای اضافه کردن چرخهای فعال، محاسبات سینماتیک معکوس باید لحاظ شوند. رباتهای ۴ چرخ نیاز به سیستم تعلیق خاصی دارند تا بتوانند تماس تمام چرخ هایشان را با زمین حفظ کنند، این موضوع بخصوص در زمینهای ناهموار از اهمیت خاصی برخوردار میباشد.
ربات HyLos 2
ربات چهار چرخ
دو طراحی معمول جهت ساخت رباتهای چهار چرخ به شرح زیر هستند.
1)رربات دارای دو چرخ فعال و دو چرخ هرزگرد
2) حرکت ربات چهار چرخ به تقلید از حرکت ماشین
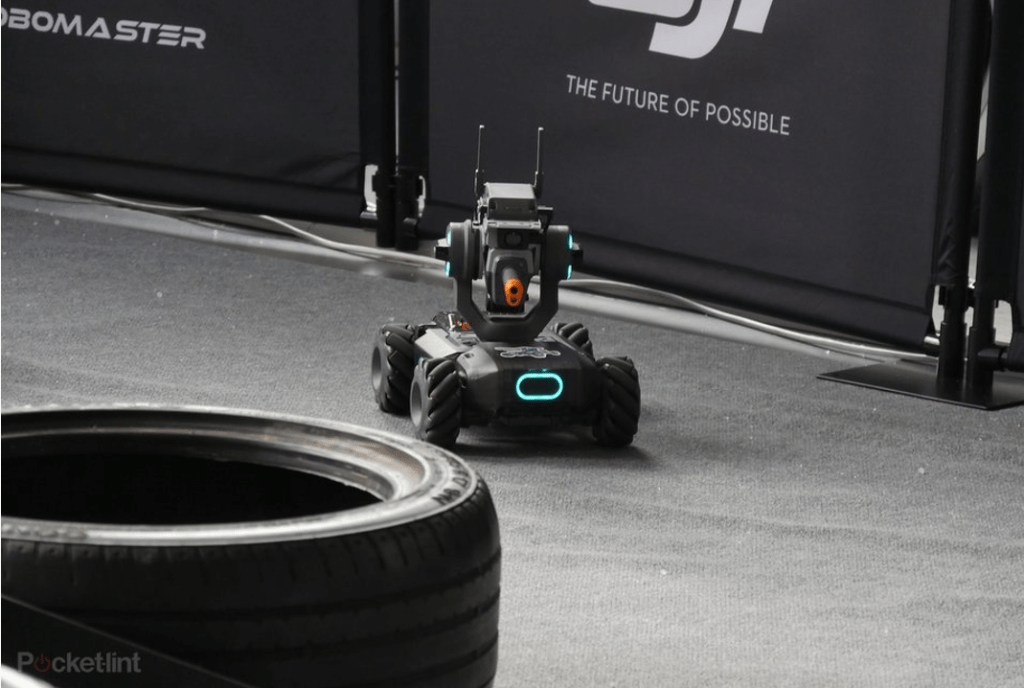
1) ربات دارای دو چرخ فعال و دو چرخ هرزگرد
این نوع رباتها تا حد زیادی به رباتهای ۳ چرخ با دو چرخ دیفرانسیلی و یک چرخ آزاد شباهت دارند، اما برای حفظ تعادل بیشتر یک چرخ دیگر نیز به ساختار آنها افزوده شده است.
این رباتها از رباتهای چرخ دار دارای ۳ چرخ ثبات بیشتری دارند چرا که مرکز ثقل شان در داخل مستطیلی قرار دارد که توسط خطهای فرضی که ۴ چرخ را به یکدیگر اتصال میدهند تشکیل شده در ضمن اگر مرکز ثقل در مرکز مستطیل قرار بگیرد ربات شرایط پایدارتری خواهد داشت بهخصوص هنگامی که قرار است دور بزند تا از سطوح ناهموار عبور کند.
ربات دارای دو چرخ فعال و دو چرخ هرزگرد
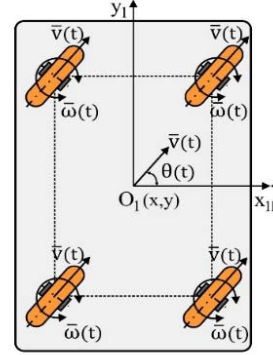
2) حرکت ربات چهار چرخ به تقلید از حرکت ماشین
این طراحی در ساخت رباتها چندان کاربردی نیست. در این مدل از دو چرخ برای کنترل و از دو چرخ دیگر برای حرکت استفاده میشود که هر کدام به صورت مستقل از یکدیگر عمل میکنند. به طور کلی طراحی رباتهای چرخ دار دارای ۴ چرخ خیلی کاربردیتر و پربازده تر از مدل های دو چرخ و ۳ چرخ میباشد. در اینگونه رباتها حفظ تعادل مقولهی پیچیدهای نخواهد بود و همین که اکثر ماشینها دارای ۴ چرخ هستند کارآمدی اینگونه طراحی را تأیید میکند.
با وجود اینکه ۴ چرخ میتوانند به گونه های مختلفی در کنار یکدیگر حرکت کنند پرکاربردترین مدل طراحی ۴ چرخ برای ربات مدل فرمان کنترل آکرمن (Ackerman) و یا دیفرانسیل میباشد.
از جمله نقاط ضعف بهره گیری از سیستم حرکتی چرخهای ماشین در رباتها میتوان به موارد زیر اشاره کرد:
ــ مکانیزم چرخش ربات باید به درستی کنترل شود چرا که کوچکترین اشتباهی سبب انتخاب جهات نادرست توسط ربات میشود.
ــ سیستم چرخهای اتومبیل هولونومیک نیست (Non-Holonomic) و در آن نمیتوان از عملگرهای مستقیم استفاده کرد.
فرمان دیفرانسیل
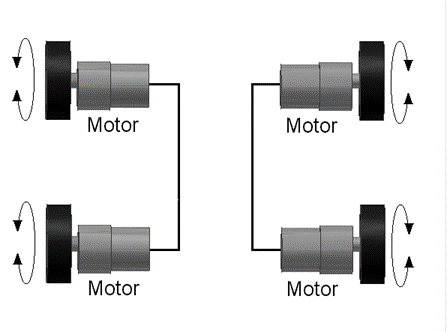
همچنین در طراحی دیگر، چرخها به صورت جفتی با یکدیگر در یک جهت حرکت میکنند اما بخش سخت طراحی این رباتها زمانی فرا می رسد که قرار باشد تمام چرخها با سرعتی یکسان بچرخند چرا که اگر این امر به وقوع نپیوندد ربات نمیتواند به طور مستقیم حرکت کند. درواقع یک طراحی خوب برای رباتهای چرخ دار با سیستم فرمان اکرمن طراحی است که تا حد زیادی به طراحی سیستم چرخهای تانک نزدیک باشد.
ربات دارای چهار چرخ فعال کوپل شده به صورت دو به دو
ربات دارای پنج چرخ یا بیشتر
این نوع طراحی صرفا در رباتهای بزرگ به کار میرود همچنین طراحی و کنترل ربات بسیار پیچیده میشود چرا که اگر ربات بخواهد به صورت مستقیم حرکت کند تمام چرخ ها باید به صورت هماهنگ با یکدیگر در یک جهت و با یک سرعت حرکت کنند .
به عبارتی دیگر اگر سرعت چرخهای سمت چپ با سرعت چرخهایی که در سمت راست ربات واقع شده تفاوت داشته باشد مسیر حرکت ربات مایل خواهد شد و همچنین تفاوت سرعت بین چرخهایی که در یک سمت قرار دارند باعث خواهد شد چرخی که از همه کندتر حرکت میکند روی زمین کشیده شود.
گاهی اوقات در کنار چرخهای اصلی از چرخهای کمکی نیز استفاده میشود و روی آنها سنسورهای حرکتی (کیلومتر شمار و …) جایگذاری میشود چرا که قرار دادن سنسور روی چرخ اصلی گاهی اوقات میتواند محاسبات تعیین سرعت و موقعیت را دچار اشکال کند.
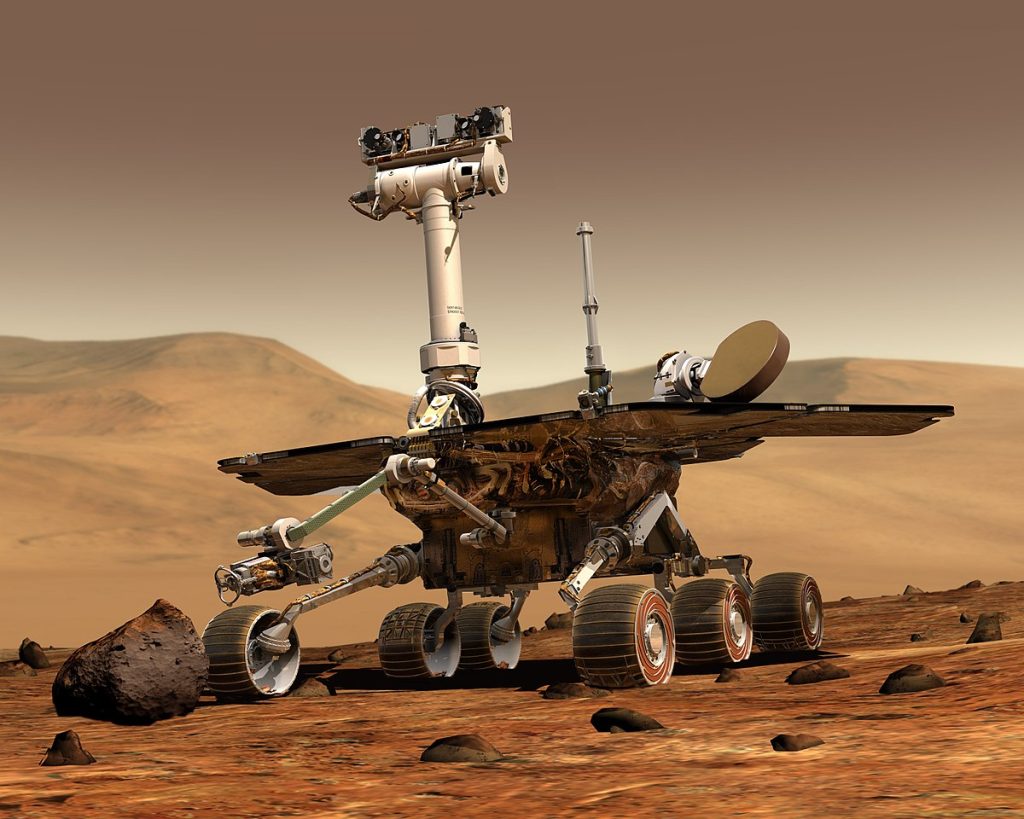
مریخ نوردها از جمله Sojourner، Spirit، و Opportunity رباتهایی شش چرخ هستند که پس از فرود روی سطح مریخ به گشت و گذار میپردازند. از آنها برای آزمایش خاک مریخ، شناسایی مکانهای جالب توجه و برداشتن نمونه از سطح مریخ استفاده میشود. این رباتها دارای سیستم تعلیق خاصی هستند که باعث میشود هیچکدام از چرخها تماس شان را با زمین از دست ندهند و به این طریق آنها قادر خواهند بود تعادل خود را در شیبها و نواحی ماسهای حفظ کنند.
مریخ نورد ناسا با شش چرخ فعال
معایب ربات چرخ دار
رباتهای چرخ دار نمیتوانند به خوبی از روی موانع عبور کنند. در ضمن بسته به ناحیهای که ربات قرار است در آن عبور و مرور داشته باشد ممکن است با مشکلاتی رو به رو شود به عنوان مثال زمینهای صخرهای، شیبهای فوقالعاده شدید و نواحی با اصطکاک کم، رباتهای چرخدار را با مشکلات حرکتی مواجه خواهد کرد. گاهی اوقات ربات باید موانع بزرگی را پشت سر بگذارد و تنها در صورتی قادر به انجام این کار خواهد بود که ارتفاع چرخهایش حداقل دو برابر ارتفاع مانع باشد، در این صورت مکانیزمهای کنترلی اضافی برای حل این مسائل مورد نیاز است.