موتورهای الکتریکی در بسیاری از ابزارآلات الکترونیکی مانند فنها، دریلها، موتورهای الکتریکی، پخشکنندههای DVD، ماشینهای ظرفشویی و غیره برای تولید حرکت چرخشی به کار میروند. آنها همچنین در آسیابهای اره و برشدهندهها که در آنها موتورها به صورت مکانیکی برای ایجاد حرکت خطی طراحی شدهاند، مورد استفاده قرار میگیرند.
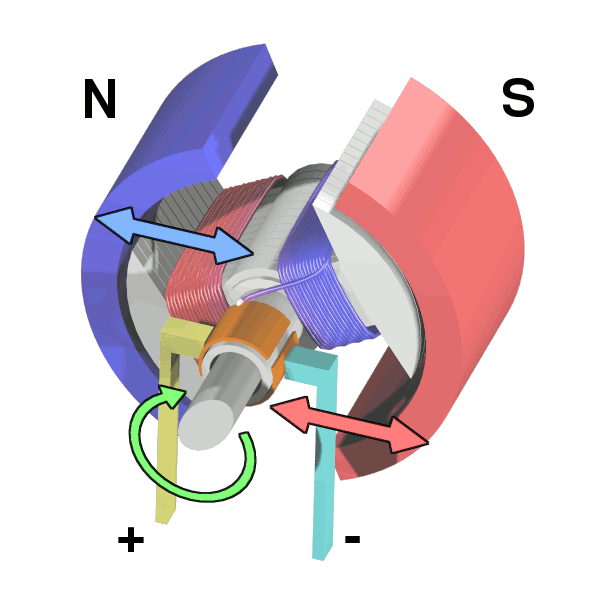
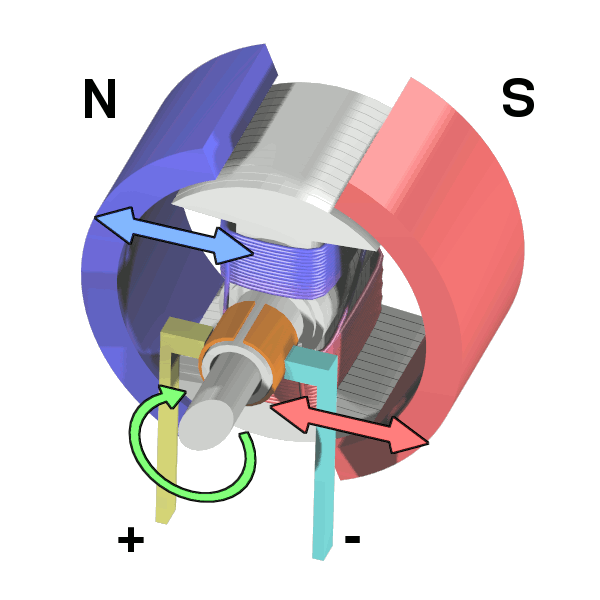
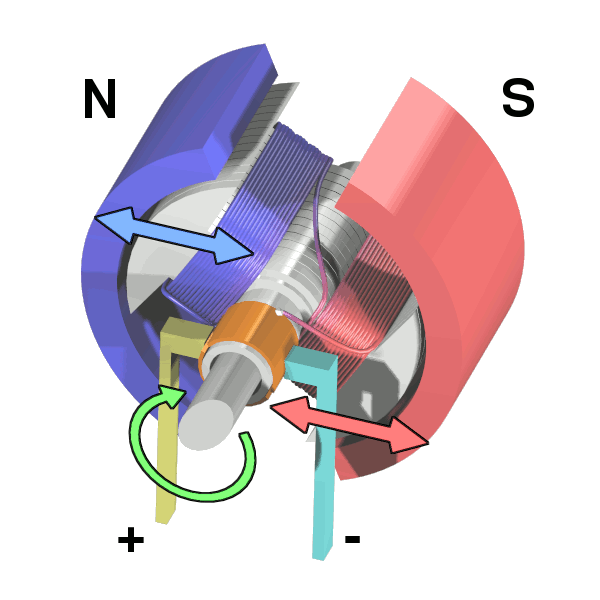
ساختار مکانیکی این موتورها دارای دو بخش مهم میباشد: یک استاتور و یک روتور. استاتور بخش ثابت موتور بوده و روتور بخش در حال چرخش موتور است. استاتور معمولاً آهنرباهای دائمی دارد (در برخی حالات سیم پیچهای الکترومغناطیسی) و روتور آهنرباهای الکترومغناطیسی (در برخی حالات آهنرباهای دائمی) دارد. در حالت ایدهآل یکی از این دو آهنربا دائمی و دیگری آهنربای الکترومغناطیسی میباشد؛ زمانی که جریان الکتریکی از آهنربای الکترومغناطیسی عبور میکند، یک میدان مغناطیسی تولید کرده و یک نیروی مغناطیسی مابین استاتور و روتور ایجاد میشود. نیروهای دافعه و جاذبه بین آهنربای دائمی و الکترومغناطیسی روتور را به چرخش در میآورند. برای چرخاندن روتور، آهنرباهای الکترومغناطیسی نیروی دافعه در یک انتها (قطب) به وجود میآورند، که آهنربای مغناطیسی را به سمت انتهای دیگر آهنربای الکترومغناطیسی جذب میکند. زمانی که روتور نصف یک دور را میچرخد قطبهای آهنربای الکترومغناطیسی می چرخند (از شمال به جنوب و یا از جنوب به شمال) و روتور را بیشتر به سمت انتهای دیگر فشار میدهند این پروسه تا جایی که حرکت دایرهای ایجاد شود ادامه می یابد.
نیروی ایجاد شده توسط میدان مغناطیسی ما بین روتور و استاتور میزان گشتاور موتور را تعیین میکند. برای درک معنای گشتاور، لازم است تا ابتدا بدانیم که نیرو چیست، نیرو کمیتی است که موجب حرکت و شتاب گرفتن جسم میشود، نیرو کمیتی برداری است و واحد آن نیوتن است. حال اگر نیرو به هر شکلی برای چرخاندن، گردش و یا دَوَران مورد استفاده قرار گیرد، به آن گشتاور گفته میشود، بهعنوان مثال نیروی لازم برای باز کردن در ظرف یک مربا، باز کردن و بستن شیر آب و یا برای باز کردن و یا بستن یک پیچ، گشتاور نامیده میشود.
تعداد دفعاتی که روتور در یک دقیقه میچرخد سرعت موتور را تعیین میکند، که با واحد دور در دقیقه اندازهگیری میشود. بنابراین زمانی که شما قصد خرید یک موتور را دارید همواره مولفه گشتاور و PRM موتور از نکاتی است که باید به آن توجه کنید، نصب چرخدندهها میتواند سرعت و گشتاور را افزایش، ولی دیگر پارامترها را کاهش میدهد.
موتورهای AC و DC
موتور AC: موتورهای الکتریکی به دو صورت مرسوم طراحی میشوند، موتورهایی که به وسیلهی جریان متناوب (AC) یا جریان مستقیم (DC) کار کنند. با این وجود استفاده از موتورهای AC در رباتهای متحرک بسیار غیر معمول میباشد؛ چرا که استفاده از آنها سخت است و اغلب رباتهای ما و مدارات آنها به وسیلهی منبع DC تغذیه میشوند. بنابراین استفاده از موتورهای AC به رباتهای صنعتی و ثابت محدود میشود.
موتور DC: پیادهسازی این موتورها بسیار ساده بوده و اغلب به عنوان محرکها در رباتها به کار میروند. انواع مختلفی از موتورهای DC در دسترس میباشد که در این قسمت بررسی خواهند شد.
موتور DC براش
موتور DC برسدار (براش)، نمونهای کلاسیک از موتور الکتریکی میباشد. همانطور که قبلاً بحث شد هر موتور دارای یک استاتور و یک روتور میباشد که یکی از آنها آهنربای دائمی است. یک موتور DC شامل یک روتور آهنربای دائمی و یک استاتور آهنرباهای الکترومغناطیسی است. از آنجاییکه موتور براش نیاز دارد تا جهتگیری روتور را تشخیص دهد، از برسها به عنوان کموتاتور یا جابجاگر استفاده میکند که بخشی از روتور بوده و شفت را لمس میکند. زمانی که روتور میچرخد (برس آن نیز به نوبه خود میچرخد)، تغییرات در جهت را تشخیص میدهند و جریان را تغییر میدهد. هدف اصلی کموتاسیون، تضمین این موضوع است که گشتاوری که روی آرمیچر عمل میکند همیشه در یک جهت باشد. ماهیت ولتاژ تولیدی آرمیچر متناوب است و کموتاتور آن را به جریان مستقیم تبدیل میکند. به بیان ساده، سیمپیچها را برای کنترل جهت میدانها روشن و خاموش میکند. جریان سیمپیچ باید همیشه از یک طرف وارد و از طرف دیگر همواره خارج گردد. این امر تضمین میکند که گشتاور همیشه در یک جهت تولید شود. در غیر این صورت، سیمپیچ به اندازه ۱۸۰ درجه در یک جهت میچرخد و پس از آن جهت چرخشش تغییر میکند. موتورهای DC در سایزها و سرعتهای مختلف موجود هستند. اگرچه این موتورها با سرعتهای کافی کار میکنند معمولاً در رباتها استفاده نمیشوند چراکه گشتاور کمی تولید میکنند. موتورهای DC تنها دو سیم دارند: یکی برای زمین و دیگری برای تغذیه.

موتور DC دندهای
همانطور که در آموزش قبلی اشاره شد، موتورهای DC سرعتهای مناسبی را بدون گشتاور کافی فراهم میکند. بهمنظور غلبه بر این مشکل، موتورهای DC اغلب با چرخدندههایی که گشتاور بزرگتر ولی سرعت کمتری تولید میکنند، جفت میشوند به طور معمول تمام رباتهای ما به یک موتور DC دندهای نیاز دارند تا وزن ربات و تمامی اجزای اضافی آن را تحمل کند.
همانطور که در عکس میبینید، شفت موتور به یک چرخدندهی بزرگ دیگر متصل شده است. زمانی که موتور میچرخد، چرخش در دقیقهی چرخدندهی دوم کمتر از موتور است. با این وجود هر چرخدنده گشتاور کلی را افزایش میدهد.
موتور DC براشلس
یک موتور DC براش با استفاده از برسها تغییرات در جهت را تشخیص میدهد. بنابراین میتواند جریان را برای ادامه چرخش روتور تغییر دهد. در یک موتور بدون براش، روتور از آهنربای دائمی و استاتور از آهنربای الکترومغناطیسی تشکیل میشوند. برای تشخیص تغییرات جهت، موتور براشلس معمولاً از سنسورهای اثر هال برای تشخیص میدان مغناطیسی روتور و در نتیجه جهت آن استفاده میکند. این موتورها در رباتها به دلیل توانایی بالایی که دارند بسیار مورد استفاده قرار میگیرند. این موتورها نسبت به موتورهای براش گشتاور کافی و سرعت بالاتری را فراهم میکند. موتورهای براشلس به دلیل پیچیدگی طراحی، گران قیمت هستند و نیاز به یک کنترلکننده برای کنترل سرعت و چرخش دارند.
سروو موتورها
عموما به عنوان سروو موتورهای RC شناخته میشوند، که موتورهای DC جفت شده با یک مدار کنترلی فیدبک، یک سیستم چرخنده برای افزایش گشتاور و یک قطعه تعیین موقعیت (معمولاً یک پتانسیومتر) هستند. زمانی که یک سیگنال یا پالس به موتور ارسال میشود، شفت موتور با استفاده از فیدبک موقعیت ارسالی از پتانسیومتر به موقعیت مورد نظر حرکت میدهد. این موتورها چرخش پیوسته و مداوم ندارند اما محدود به یک محدودهی عملکردی معین هستند (معمولاً ۲۰۰ درجه به سمت جلو و عقب) که به منظور دستیابی به چرخش پیوسته لازم است در آن تغییراتی ایجاد شود. از آنجایی که این موتورها نیاز به سیگنال کنترلی دارند، یک سیم اضافه برای دریافت پالسهای کنترلی خواهند داشت بنابراین این موتورها دارای سه سیم خروجی هستند: برای زمین، تغذیه و پالس کنترلی.

استپر موتور
موتورهای پلهای (استپر) موتورهای بدون براش هستند که، یا اعمال پالسهای الکتریکی، چرخش روتور را به تعداد پلههای مجزا تقسیم میکند. به عبارت دیگر، یک موتور بدون براش زمانی که ولتاژ به آن اعمال شود، به طور پیوسته میچرخد. اما یک موتور پلهای آن را به پلههایی در هر دور تقسیم کرده و در هر مرحله برای یک پالس مشخص پرش میکند. برخلاف یک موتور سروو، موتور استپر نیاز به مکانیزم پیچیده فیدبک موقعیت ندارد. موتورهای پلهای مشابه موتورهای DC براش با گشتاور کم هستند. مطابق با آرایش سیمپیچی داخل موتور پلهای میتوانند به موتور پلهای تک قطبی یا دو قطبی طبقهبندی شوند.

شکل بالا، دو نوع متفاوت از موتورهای پلهای را نشان میدهد؛ موتور پلهی اول در عکس زمانی استفاده میشود که شفت مرکزی ثابت بوده و در واقع بدنهی اطراف آن میچرخد. عکس دوم یک موتور پلهای معمولی را نشان میدهد که پالسها را دریافت و شفت را می چرخاند.
موتور DC خطی
موتورهای DC خطی یک موتور DC نوع معمولی است، که استاتور آن گسترده شده است و معمولا در رباتهای متحرک استاندارد به کار نمیرود به طور دقیقتر، یک موتور DC براش دارای یک روتور میباشد که داخل استاتور در حال چرخش است. در یک موتور DC خطی کلاسیک استاتور باز شده و به شکل سیمپیچهای تخت قرار میگیرد. روتور حول استاتور روی یک خط مستقیم میچرخد.



