
یک ربات زیر آبی یک وسیله نقلیه زیرآبی خودکار (AUV) است که بدون نیاز به ورود اطلاعات از سوی کاربر، قادر به حرکت زیر آب است
از آن موقع که اولین وسیله نقلیه کنترل از راه دور زیرآبی با نام Poodle در سال 1953 شروع به کار کرد، رباتهای زیرآبی همچون وسایل نقلیه زیرآبی خودکار (AUVs) و وسایل نقلیه کنترل از راه دور (ROVs)، تکامل خود را در دهههای 60 و 70 قرن 20 میلادی شروع کردند و اکثرا این رباتها برای اهداف نظامی مورد استفاده قرار گرفتند.
در دهه 80 قرن 20 میلادی، ROV ها در صنعت دریایی-تجاری مورد استفاده قرار گرفتند و حضورشان در کاربردهای علمی افزایش یافت. اولین وسایل نقلیه بدونسیم خودکار، در دهه هشتاد میلادی برای اهداف آزمایشگاهی ساخته شدند.
در حال حاضر، رباتهای زیرآبی در کاربردهای نظامی، تجاری و علمی همچون اکتشافات در اعماق دریا برای دستیابی به منابعی چون نفت، گاز و فلز، تعمیرات لولههای انتقال زیر آب، بررسی خرابههای کشتیها، تحقیقات، نمونهبرداری از موجودات زنده در اقیانوس، باستانشناسی زیر آب و تحقیقات زیر یخ و در نهایت درک نیروهای طبیعی همچون گردابها و سونامی مورد استفاده قرار میگیرند.
یک ربات زیرآبی یک وسیله نقلیه زیرآبی خودکار (AUV) است که بدون نیاز به ورود اطلاعات از سوی کاربر، قادر به حرکت زیر آب است. AUV ها زیرمجموعهای از گروه بزرگی از سیستمهای زیرآبی با نام وسایل نقلیه زیرآبی بدون سرنشین میباشند که( حتی وسایل نقلیه زیرآبی کنترل از راه دور غیر خودکار (ROVs) نیز جز این گروه بزرگ هستند) از روی سطح آب توسط یک کاربر یا هدایتکننده، به کمک سیم بندنافی یا به صورت بیسیم، روشن شده و کنترل میشوند.
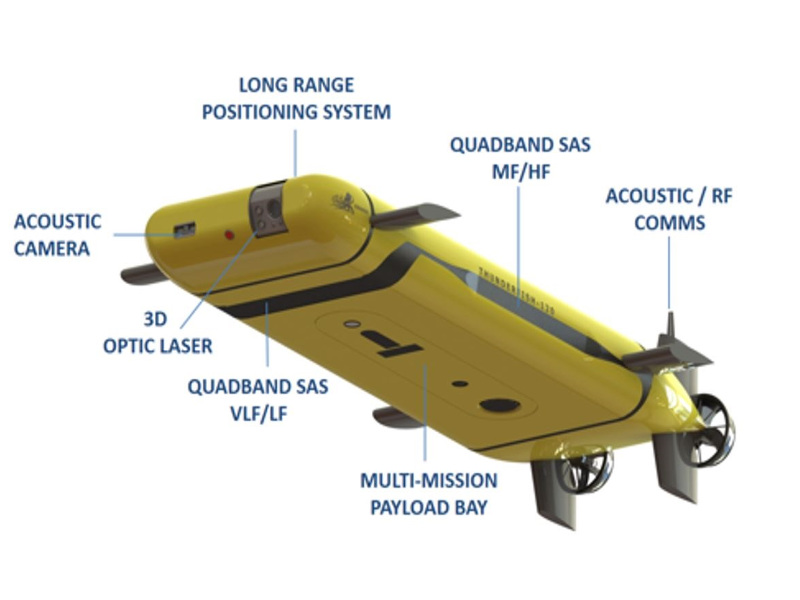
تمام ROV ها دارای دوربین تصویری، سیستم رانش و نور هستند. دیگر لوازم همچون بازوی محرکه، نمونهبردار آب، ابزار اندازهگیری شفافیت، نفوذ نور، دما و عمق با توجه به نیاز مشخصشده، به ربات اضافه میشوند. AUV ها در کاربردهای نظامی معمولا با نام وسایل نقلیه زیرآبی بدون سرنشین خوانده میشوند.
طراحی ربات آبی
اگرچه علاقه فزایندهای به مطالعه رباتهای آبی وجود دارد، تنها تعداد کمی از رباتهای آبی با موفقیت ساخته شدهاند. این به دلیل محیط چالشبرانگیز آنها و همچنین به این دلیل است که برق و الکترونیک اساسا آب را دوست ندارند. ساختن یک ربات برای کار در آب به طور کلی منجر به شکستهای ناخوشایند میشود. با این حال، اگر شما علاقهمند به ساخت رباتی برای حرکت در یک حوض محلی یا استخر خود هستید، همچنان امیدوار باشید زیرا ساخت رباتی برای حرکت در عمق کمتر از 10 متر آسان است.
قبل از طراحی یک ربات آبی، چند چالش وجود دارد که باید بر آنها غلبه کنید. اولین چالش در ایجاد یک ربات آبی این است که تمام وسایل الکترونیکی را ضدآب کنیم. راههای زیادی وجود دارد که از طریق آنها میتوان وسایل الکترونیکی را ضد آب کرد. برخی از ایدههای اساسی در زیر ذکر شدهاست:
- قرار دادن تمامی مدارات الکترونیکی در یک محفظه نفوذناپذیر در برابر هوا
- قرار دادن مدارات، داخل محفظه مملو از روغن که در برابر جریان آب مقاومت کند
- استفاده از چسب گرم در تمامی قسمتهای مدار و سپس غوطهور کردن آن در آب.
تکنیک رانش دیفرانسیلی بر روی این رباتهای آبی بهترین عملکرد را دارد و نیروی محرکه میتواند بر اساس طراحی ربات شما، دم، باله، رانشگر، بال، پارو، چرخ پارویی، پمپ هوا و غیره باشد.
رباتهای آبی شامل رباتهایی هستند که روی آب حرکت میکنند، غوطهور میشوند یا زیر آب میخزند.
مزایا و معایب رباتهای آبی
برخی از مزایای رباتهای آبی عبارتنداز:
- حوزه وسیع کشفنشده در علم رباتیک
- هر طراحی مطمئنا منحصر به فرد خواهد بود.
- به دلیل پوشش بیشتر کره زمین با آب، فرصت برای عرض اندام زیاد است.
- فرصتهای بیش از اندازه در کاربردهای تجاری
- محیط آزمایش میتواند هر چیزی همچون گودال کوچک، سطل آب یا یک استخر شنا باشد.
هر جا فرصت باشد، چالش نیز وجود دارد. برخی از موانع بزرگ در هنگام ساخت رباتها عبارتنداز:
- ضد آب بودن: آب دشمن مدارات الکتریکی است و در صورت ضد آب نکردن مدارات، با اتصال کل مدار به یکدیگر مواجه خواهیم شد.
- عمقهای بیشتر، نیازمند طراحیهای پیچیده و تحقیقات گستردهای هستند.
- کم بودن تعداد رباتهای آبی، به معنای پشتیبانی کم و حداقل بودن منابع موجود بود.
- تمامی سنسورهایی که در هوای خشک کار میکنند، نمیتوانند همان عملکرد را در داخل آب ارایه دهند.
- وزن و چگالی ربات، عملکرد رباتهای دریایی را به شدت تحت تاثیر قرار میدهد.
در برخورد با چالشهای کشفنشده و مهمانهای ناخوانده دقت فراوانی باید صرف شود.
انواع ROV ها
ROV های امروزی بر اساس اندازه، میزان توانایی، توان خروجی و اینکه آیا فقط الکتریکی یا الکتریکی-هیدرولیکی هستند، به گروههای زیر تقسیم میشوند:
- میکرو: گروه میکروی ROV ها وزن کم و اندازه کوچکی دارند. وزن آنها کمتر از 3 کیلوگرم است و میتوان به عنوان جانشین شیرجهزن، به خصوص در مناطقی که امکان حضور انسان وجود ندارد همچون فاضلاب، لوله آب و یا سوراخ کوچک از آنها بهره برد.
- مینی: گروه مینی ROV ها وزنی حدود 15 کیلوگرم دارند. از آنها هم به عنوان جانشین شیرجهزن میتوان استفاده کرد. یک شخص به تنهایی میتواند سیستم ROV را با قایق حمل کرده و پس از فرستادن ربات به محل مورد نظر، بدون کمک خارجی، ماموریت خود را انجام دهد.
- عمومی: معمولا دارای نیروی محرکه کمتر از 5 اسب بخار، بازوهای کنترلکننده، گیرهها و یک واحد ردیاب آوایی برای بررسی کاربردهای نوری هستند. بیشترین عمق حرکت داخل آب برابر 1000 متر است.
- گروه سبک کار: معمولا کمتر از 50 اسب بخار نیروی محرکه دارند. بازوهای کنترلکننده دارند که جنسشان از پلیمرهایی همچون پلی اتیلن و نه از آلیاژهای قدیمی میباشد. حداکثر عمق حرکت آنها برابر با 2000 متر است.
- گروه سنگین کار: معمولا کمتر از 220 اسب بخار نیروی محرکه دارند و میتوانند دو بازوی کنترلکننده حمل کنند. حداکثر عمق حرکت آنها 3500 متر است.
- گودبردار: معمولا بیش از 200 و کمتر از 500 اسب بخار نیروی محرکه دارند و دارای کابل محکم برای وصل شدن به دستگاههای کشنده هستند و در برخی موارد تا عمقهای بیش از 6000 متر نیز کارایی دارند.
ربات قایقی چیست؟
رباتهای قایقی روی آب شناور هستند و برای شیرجه زدن در آب طراحی نشدهاند. آنها میتوانند خودکار باشند یا از راه دور توسط فردی کنترل شوند. این نوع ربات، آسانترین نوع ربات آبی است زیرا مراحل پیچیده ضدآب کردن قسمتهای الکترونیکی در آنها وجود ندارد و بیشتر قسمتهای الکترونیکی میتوانند دور از آب نگهداشته شوند.

ربات شناگر یا زیردریایی چیست؟
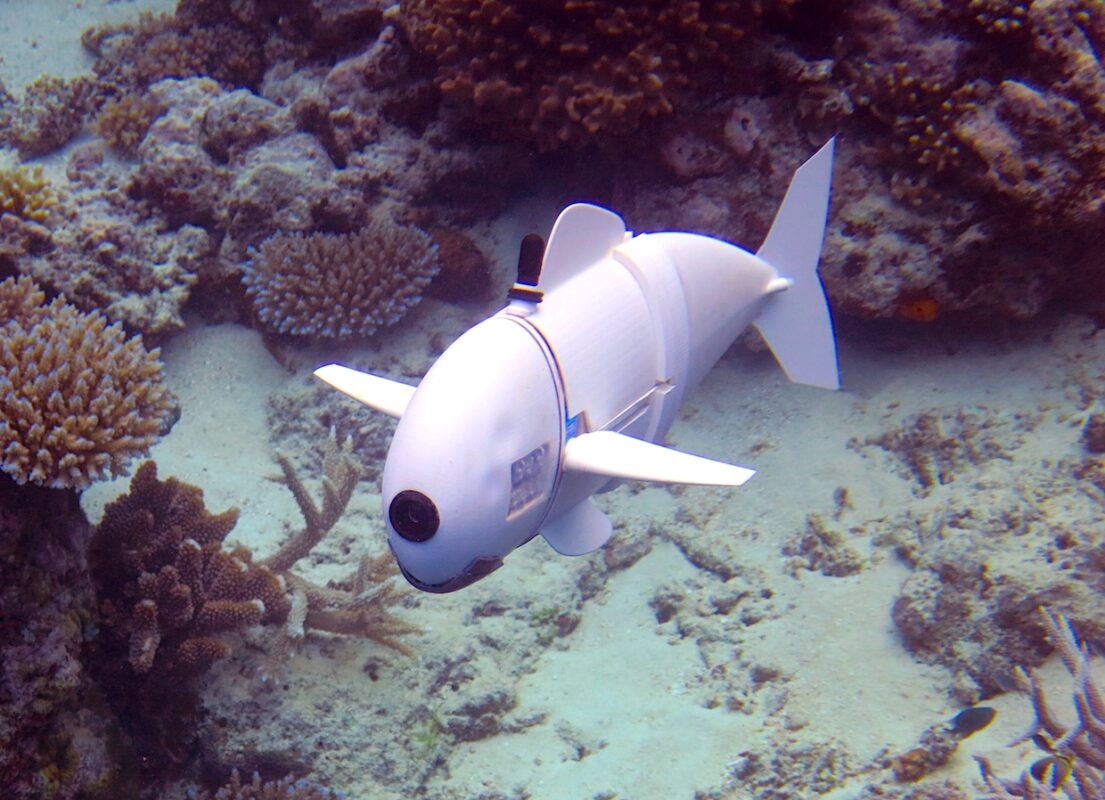
آیا یک ماهی ربات دیدهاید؟ این رباتهای ماهی، همان رباتهای شناگر هستند. رباتهای شناگر توسط بالهها حرکت میکنند اما نسخه زیردریایی آنها به سمت عمق حرکت کرده و با استفاده از بالها و جهشدهندهها و غیره از جایی به جای دیگر حرکت میکنند. این رباتهای شناگر عموما بدون هوش مصنوعی یا اندازه کوچکی از آن، در داخل آب حرکت میکنند.
ربات خزنده زیرآبی چیست؟
رباتهای خزنده زیرآبی، نسخه دریایی رباتهای زمینی هستند. این رباتها یا روی چرخ میچرخند یا زیر آب راه میروند. در صورت اعمال شرایط ضدآب بودن، این رباتها را میتوان به راحتی طراحی کرد و ساخت. مفهوم رباتهای زمینی، برای رباتهای خزنده، غلتشی یا راهرونده زیر آب نیز صادق است.
سنسورهای رایج در رباتهای زیر آبی
انواع سنسورهای رایج که در وسایل نقلیه زیرآبی از آنها استفاده میشود عبارتنداز:
- قطبنما (ژیروسکوپی یا مغناطیسی) تخمینی از مکان شمال مغناطیسی ارائه میدهد.
- واحد اندازهگیری اینرسی (IMU) اطلاعاتی در مورد شتاب خطی و سرعت زاویهای ربات فراهم میکند.
- سنسور عمق، مقدار عمق از سطح آب و فشار آب در آن عمق را اندازه میگیرد.
- واحد ردیابی آوایی میتواند فاصله افقی از موانع روبرویی و ارتفاع از کف دریا را شناسایی کند.
- واحد ثبت سرعت داپلر (DVL) سرعت وسیله نقلیه نسبت به کف دریا و نسبت به سرعت جریان آب اطراف را اندازهگیری میکند.
- سیستم مکانیابی جهانی (GPS) سیستم راهبری برای یافتن موقعیت وسیله نقلیه است.
- مکانیابی آکوستیک با استفاده از صوت، مکان وسیله نقلیه را تشخیص میدهد.
- سیستمهای بصری (دوربینها) کارهایی همچون ردیابی بصری لولهها، نظارت بر ایستگاه، دوربین نظارتی یا تکهتکه کردن تصاویر یک عکس را انجام میدهند.
کاربرد رباتهای زیرآبی
رباتهای زیرآبی در حال حاضر نقش برجستهای در کارهای فراوان علمی، تجاری و نظامی ایفا میکنند. آنها به طور فزایندهای برای کاهش فشار کار بر روی اپراتورهای انسانی و بهبود عملکرد استفاده میشوند.
در حال حاضر، AUV ها تقریبا به طور انحصاری برای کارهای تحقیقاتی مورد استفاده قرار میگیرند، اما نمونهگیری و سایر کارهای کمککننده در حال امکان پذیرتر شدن هستند. هدف نه تنها این است که این وسایل نقلیه رباتیک جایگزین غواصان انسانی یا وسایل نقلیه تحت کنترل انسان شوند، بلکه همچنین امکان استفاده از نسل کاملا جدیدی از تجهیزات زیردریایی، بدون مداخله کشتیهای حفاری یا سایر کشتیهای جرثقیلدار مهیا شود.
صنعت نفت و گاز ساحلی برای نصب، بازرسی و سرویس سکوها، خطوط لوله و تاسیسات تولید زیر دریا به شدت به ROVها متکی است. هرچه جستجو برای نفت و گاز عمیقتر میشود، اتکا به ROV ها بیشتر میشود. کاربردهای علمی ROVها شامل کارهای تحقیقاتی، بازرسی و نمونهبرداری است که قبلا توسط زیردریاییها یا وسایل نقلیه یدککش شده توسط انسان انجام میشد. ROV های علمی اکنون به دستگاههای نمونهگیری پیچیده برای نمونهبرداری از حیوانات، میکروبها، مایعات دریچه هیدروترمال سوزاننده و نمونههای مختلف سنگ مجهز شدهاند. علاوه بر این، ROV ها همچنین برای استقرار و اجرای آزمایشهای کف دریا مورد استفاده قرار میگیرند که میتواند شامل وظایف دشواری مانند حفاری و قرار دادن ابزار ظریف باشد.
ROV ها همچنین به عنوان ابزار قدرتمندی برای بررسی کشتیهای غرقشده در زیرآب و سایر مکانهای فرهنگی استفاده شدهاند. کاربردها شامل بررسیهای قانونی کشتیهای غرقشده مدرن برای تعیین علت غرق شدن، باستان شناسی و بازگرداندن وسایل داخل کشتی است. وظایف نقشهبرداری خاص شامل عمقسنجی کف دریا، تصویربرداری صوتی، نقشهبرداری میدان مغناطیسی، مکان یابی دریچه های گرمایی، و بررسیهای تصویری میشود.
AUV ها میتوانند بهرهوری و کیفیت دادهها را در مقایسه با سیستمهای یدککششده و سیمدار بهبود بخشند. آنها همچنین در محیطهایی که هیچ وسیله دیگری برای جمعآوری دادهها ممکن نیست، مانند زیر لایههای یخ عمل کردهاند. همچنین، دسترسی روزافزون به حسگرهای شیمیایی پیچیده، حسگرهای بیولوژیکی و طیفسنجهای جرمی اکنون به AUVها اجازه میدهد تا نقشههای مکانی و زمانی از ویژگیهای محیطی بسازند که قبلاً فقط با بازگرداندن نمونهها به آزمایشگاه قابل مطالعه بود.
ارتش همیشه در توسعه قابلیتهای رباتیک زیر آب پیشرو بوده است. آنها پیشگام ROV ها برای کارهایی مانند بازیابی سلاحهای آزمایشی و بازگرداندن وسایل داخل کشتیهای غرقشده بودند.
بسیاری از کشورها از AUV ها برای تحقیقات نظامی، جمعآوری دادههای محیطی و جست و جوی خطراتی مانند مینها استفاده میکنند. نوآورانهترین کاربرد شامل شبکههای AUV است که میتوانند بهعنوان دستگاه کمکی شناورهای سطحی و زیردریاییهای معمولی عمل کنند و نظارت بر مناطق وسیع برای دورههای طولانی با هزینههای بسیار کمتر از آنچه میتوان با کشتیهای معمولی، زیردریاییها و هواپیماهای معمولی به دست آورد، را ممکن میسازد.



