سنسور، دریچهای برای ربات به سوی محیط اطراف است. آنها به رباتها اجازه میدهند تا مشخصات فیزیکی و هندسی اجسام محیط اطرافشان را مانند موقعیت، جهت، سرعت، شتاب، فاصله، سایز، نیرو، گشتاور، دما، روشنایی، وزن و غیره را درک و اندازهگیری کنند.
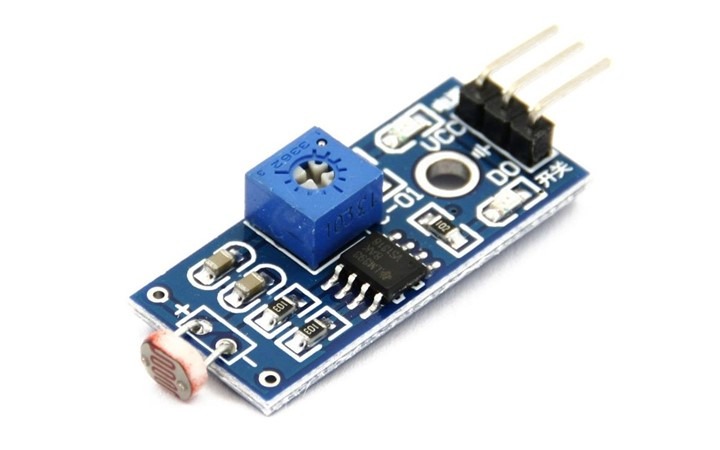
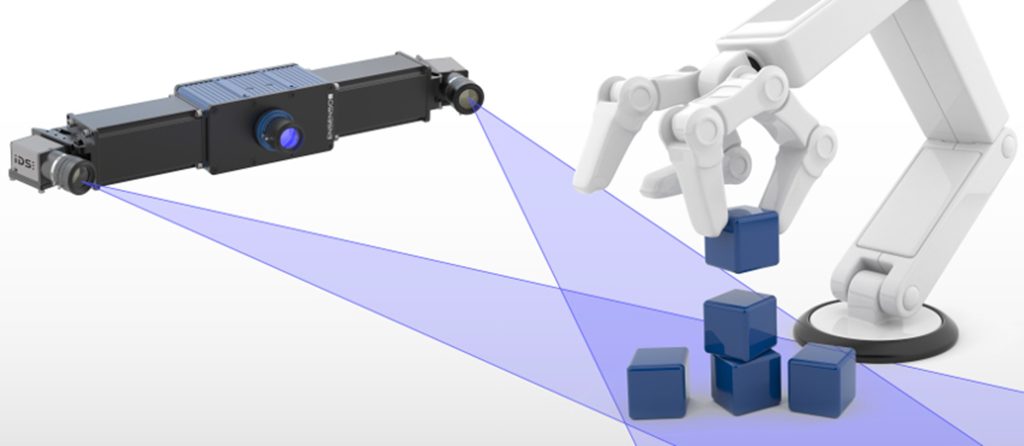
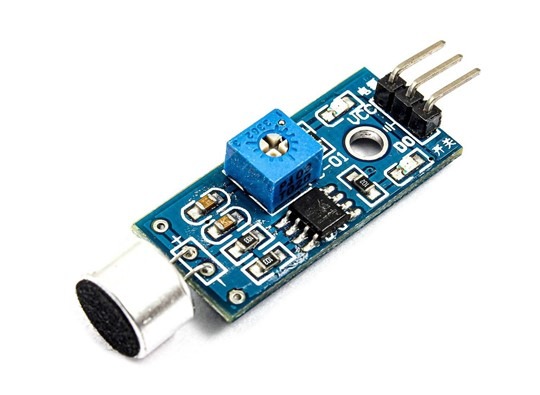
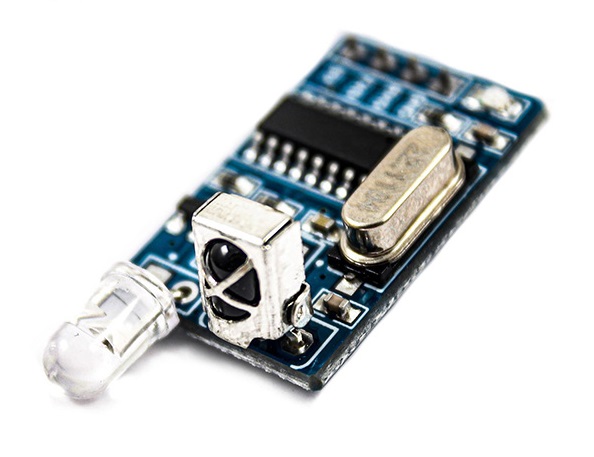
بطور معمول سنسورها به دو گروه طبقهبندی میشوند: سنسورهای داخلی و سنسورهای خارجی. سنسورهای داخلی همانند سنسور موقعیت، سنسور سرعت، سنسور شتاب، سنسور گشتاور موتور و غیره اطلاعاتی دربارهی شرایط خود ربات فراهم میکنند، در حالیکه حسگرهای خارجی همانند دوربینها، حسگرهای مسافتسنج ( سنسور اشعهی مادون قرمز، مسافتیاب لیزری و سنسور فراصوتی)، سنسورهای تماسی و مجاورتی ( دیود نوری، آشکارساز اشعهی مادون قرمز، سامانهی بازشناسی با امواج رادیویی، تماسی و غیره) و سنسورهای نیرو اطلاعات را از محیط اطراف جمعآوری میکنند.
سنسورها با توجه به ویژگیهای متفاوتی تعریف میشوند که قابلیتهای آنها را بیان میکند:
حساسیت ( تغییر در خروجی و ورودی)
خطی بودن (پایداری و ثبات ورودی و خروجی)
زمان پاسخ (مدت زمان موردنیاز تا تغییر در ورودی منجر به تغییر در خروجی گردد)
محدودهی دینامیکی/ اندازهگیری ( تفاوت میان حداقل و حداکثر)
دقت (تفاوت میان مقادیر واقعی و اندازهگیری شده)
میزان تکرارپذیری ( تفاوت میان اندازهگیریهای تکرار شده)
وضوح (کمترین افزایش قابل مشاهده)
پهنای باند (نتیجهی وضوح بالا یا مدت زمان سیکل)
سنسورها قادر به اندازهگیری مقادیر و کمیتهای فیزیکی بوده و میتوانند این ورودی را به منظور ضبط و نظارت، به سیگنال الکتریکی تبدیل کنند. بنابراین، انتخاب سنسور صحیح بر مبنای رباتهای مورد استفاده و محیط اطراف آنها از اهمیت بالایی برخوردار است. سنسورهایی که ورودیهای یکسانی را اندازهگیری میکنند، میتوانند در میزان دقت و حساسیت متفاوت باشند. بنابراین، هنگام طراحی یک ربات این مساله بایستی مدنظر قرار گیرد.
در واقعیت، سنسورها در رباتیک جهت اتوماتیکسازی مورد نیاز هستند. بدون آنها، در واقع، یک ربات نابینا و ناشنواست. حسگرها به یک ربات این اجازه را میدهند تا بر این موانع غلبه کند و اطلاعات را به منظور تعامل، از محیط اطراف گردآوری کنند.
رباتهای انساننما به منظور تقلید از تواناییهای همتایان زندهی خود، به تعداد زیادی از این حسگرها نیاز دارند. شرکتهایی نظیر Boston Dynamic، رباتهای خود را مجهز به سنسورهایی کرده که حواس بینایی، شنوایی و لامسه را شبیهسازی میکنند، همانند سنسورهایی که رباتها را قادر به درک و هدایت محیط اطراف میسازد.