زمانی که رباتهای چرخدار بر دنیا حکمرانی میکردند و به نظر به شدت معروف شده بودند، نوآوران به شدت تلاش میکردند تا جایگزینی مناسب برای چرخها بیابند که بتوانند در هر محیطی کارایی داشته باشند. اضافه کردن پاها به رباتها ممکن است راهحلی برای رباتها باشد تا بتوانند در مناطق صعبالعبور حرکت کنند.
پاهای انسانها و حیوانات را دیدهایم و با آنها آشنا هستیم؛ اما ساختن پاهای ربات روند پیچیدهای دارد. واقعیتی که معمولا متوجه شده و نادیده گرفته میشود نحوه یادگیری راه رفتن کودک است که منحنی یادگیری محض را نیز درگیر میکند. اگر ما انسانهای هوشمند به زمان زیادی برای یادگیری راه رفتن نیاز داریم تصور کنید ساختن پا برای ربات و آموزش راه رفتن به آن چگونه است. اگرچه تحقیقات گستردهای در زمینه رباتهای پادار در حال انجام است، محققین هنوز هم در تلاش هستند تا ربات پاداری بسازند که بتواند نحوه راه رفتن انسان و یا حتی هر نوع حیوان را تکرار کند.
اضافه کردن پا به رباتها کار پیچیدهای است اما حضور پا به جای چرخ مزایای بسیاری دارد و دلیل آن این است که بیشتر موجودات زنده (به جز باکتریها که از تاژک که نوعی چرخ بیولوژیکی است استفاده میکنند) پا دارند و میتوانند خود را با شرایط هر منطقه و محیطی تطبیق بدهند.
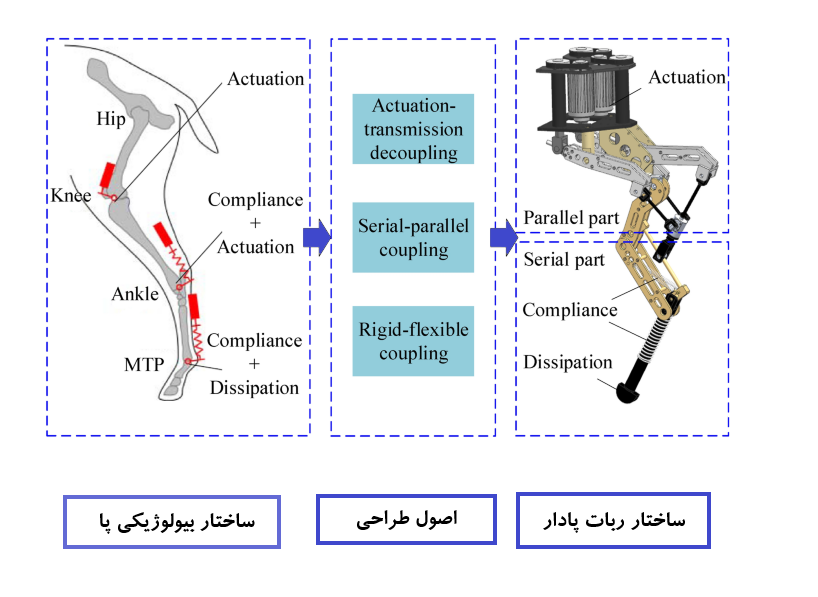
1. طراحی ربات پادار
مزایای رباتهای پادار
در ادامه برخی از مزایای پاها نسبت به چرخها آورده شدهاست:
رباتها یا وسایل نقلیه پادار میتوانند در هر نوع سطحی که برای رباتهای چرخدار غیرقابلدسترسی است حرکت کنند. در مقاله قبلی در مورد انواع مختلف چرخ برای سطوح مختلف صحبت کردیم اما هیچکدام از استانداردهای ذکر شده برای تمامی سطوح موثر واقع نشد. علاوه بر این، چرخها به گونهای طراحی شدهاند که بر سطوح آماده همچون سطوح نرم، جادهها، ریلها و غیره حرکت کنند.
رباتهای پادار میتوانند بپرند و از روی موانع عبور کنند درحالی که رباتهای چرخدار باید از روی موانع بالا بروند یا مسیر دیگری انتخاب کنند.
چرخها به یک مسیر پیوسته برای حرکت نیاز دارند اما پاها میتوانند در مسیرهای تکه تکه نیز قدم بردارند و رو به جلو حرکت کنند؛ مثلا، اگر در شهر خاصی زلزله بیاید، مسیرهای پیوسته از بین خواهند رفت. اینجا جایی است که رباتهای پادار به درد میخورند اگرچه رباتهای چرخدار مسیریاب نیز تا مناطق به خصوصی می توانند حرکت کنند.
رباتهای پادار میتوانند از قدم گذاشتن در مناطقی که موجب گیر کردن ربات میشود خودداری کنند که از این مناطق در صورت وجود ربات چرخدار نمیتوان صرفنظر کرد.
ربات پادار به ما برای پیدا کردن نحوه حرکت انسان یا حیوان کمک میکند.
زمانی که از محل زندگی اصلاح شده خود خارج شده و به سمت مناطق نامطلوب سفت، صخرهای، شنی و شیبدار برویم، متوجه میشویم که اختراع درخشان چرخها کاملا بیفایده بوده است.
نهایتا، کپیبرداری از انسان و حیوان و به چالش کشیدن طبیعت هیجانانگیز است.
حالا که از مزایای رباتهای پادار مطلع شدید، چرا از رختخواب گرم و نرم خود بیرون نمیآیید و شروع به ساختن ربات پادار نمیکنید؟ احتمالا این کار را ترجیح نمیدهید. دلایل بسیاری وجود دارد که پاها جایگزین مناسبی برای چرخها نیستند و به همین دلیل بیشتر وسایل نقلیه ساخت بشر چرخدار هستند. برخی از مزایای اساسی چرخها در ادامه آورده شدهاند:
ربات چرخ دار یا پادار؟
دلیل اصلی و مهم این است که رباتها یا وسایل نقلیه چرخدار طراحی و ساخت آسانی دارند اما رباتهای پادار به محاسبات و ماشینهای پیچیده نیاز دارند تا بتوانند تعادل، هماهنگی، بازدهی و سرعت برقرار کنند.
ساخت یک ربات چرخدار نسبت به ساخت یک ربات پادار هزینه کمتری در بر خواهد داشت.
رباتها یا وسایل نقلیه چرخدار نسبت به رباتهای پادار سریعتر حرکت میکنند و بازدهی انرژی بیشتری دارند (تعدادی کمی از محققین ادعا کردهاند که رباتهای پادار بازدهی انرژی بیشتری دارند. تا زمانی که مطالعات اثبات نکردهاند که پاها بازدهی انرژی بیشتری دارند ما حقیقت اینکه در دنیای واقعی چرخها بازدهی انرژی بیشتری دارند را قبول میکنیم).
از سیستم رباتهای پادار انتظار داریم تا گام مناسب برای حرکت تولید کند اما چرخها فقط نیاز به غلت خوردن دارند. اگر می خواهید بدانید گام مناسب چیست بخوانید: گام مناسب الگوی حرکتی جوارح حیوانات و انسانها برای حرکت در انواع مختلف سطوح است. از همین ایده مشابه برای طراحی الگوی حرکتی رباتها در سطوح مختلف استفاده شدهاست.
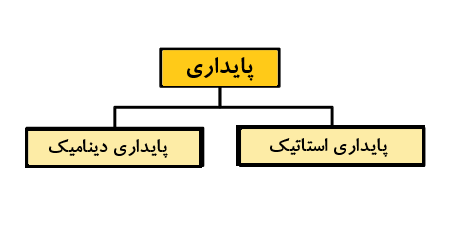
پایداری چیست؟
پایداری چیست؟ همه ما میدانیم پایداری چیست، اما برای اینکه تعریفی داشته باشد میگوییم: «پایداری همان تعادلی است که قابل مشاهده و اندازهگیری است». پایداری به ویژه برای رباتهای پادار مهم است. دو نوع پایداری وجود دارد
2. انواع پایداری استاتیک و دینامیک
پایداری استاتیک
یک ربات با پایداری استاتیک تعادل خوبی دارد و در هنگام ایستادن به زمین نمیخورد. این بدین معنی است که مرکز ثقل ربات درون پایه تماس با زمین قرار دارد. فرض کنید یک ربات سه پا داریم که پاها به صورت مثلت تنظیم شدهاند. این ربات تا زمانیکه مرکز ثقل داخل مثلت قرار دارد، به هیچ نوع جابجایی برای ثابت ایستادن نیاز ندارد. این مثلث را «چندضلعی حمایتی» مینامند که ناحیهای افقی بالای مکان مرکز ثقل است تا پایداری استاتیک به دست آید. اگر جملات قبلی نامفهوم هستند، فقط کافی است متوجه شوید که چندضلعی حمایتی همان سطحی است که ربات روی آن ایستاده و درون نقاط حمایتی قرار دارد.
حداقل نقاط تماس با زمین برای داشتن پایداری استاتیک ربات عدد 3 است.
اما به دست آوردن پایداری استاتیک با دو پا یا دو چرخ کار آسانی نیست. انسانها که دوپا هستند به نظر پایداری استاتیک ندارند.
عضلات و اعصاب ما تعادل ما را کنترل میکنند و به نظر برای داشتن پایداری تلاشی انجام نمیدهیم. به همین دلیل است که کودک برای ایستادن به یک یا دو سال زمان نیاز دارد.
3. پایداری استاتیک
پایداری دینامیک
پایداری دینامیک جایی اتفاق میافتد که پایداری در حال حرکت داشته باشیم. یک ربات تکپا را تصور کنید که از جایی به جای دیگر میپرد و تا زمانی که حرکت میکند میتواند تعادل خود را حفظ کند و در صورت ایستادن سقوط خواهد کرد.
اگرچه کنترل رباتهای دارای پایداری دینامیک دشوار است، بازدهی انرژی بالایی دارند و نسبت به رباتهای دارای پایداری استاتیک سریعتر حرکت میکنند.
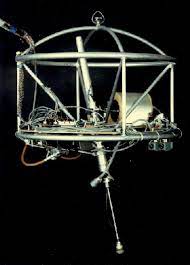
تصویر زیر یک ربات تکپای سه بعدی دارای پایداری استاتیک از آزمایشگاه پای دانشگاه MIT را نشان میدهد.
برای استفاده بهینه از هر دو پایداری، یک طراح بهتر است به فکر طراحی یک ربات دارای پایداری استاتیک باشد که بتواند از الگوی حرکتی (گام مناسب) ربات دارای پایداری دینامیک بهره ببرد. فرض کنید یک ربات 4 پا (تتراپاد) داشته باشیم. از آنجایی که 4 نقطه تماس با زمین وجود دارد، ربات در هنگام ایستادن پایداری دارد. در هنگام حرکت، ربات میتواند تک تک پاها را به ترتیب بلند کرده و رو به جلو حرکت کند که این حرکت کندی است. حال فرض کنید که این ربات بتواند با بلند کردن همزمان دو پا رو به جلو حرکت کند و از جایی به جای دیگر بپرد. از آنجایی که فقط دو نقطه تماس با زمین وجود دارد، ربات در هنگام حرکت پایداری دینامیک و بازدهی انرژی دارد.
4. پایداری دینامیک
ربات یک پا
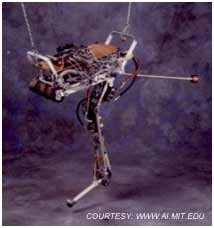
5. MIT تحقیقات زیادی بر روی رباتهای تکپا انجام دادهاست. تصویر بالا هم Uniroo از آزمایشگاه پای دانشگاه MIT را نشان میدهد.
حداقل پای لازم برای یک ربات برای داشتن تماس زمین برابر با یک است. رباتهای تکپا اصولا برای پریدن طراحی میشوند (مطمئن نیستم آیا مکانیزم دیگری برای حرکت آنها وجود دارد یا نه). پس یک ربات پرشی چه کاری میکند؟ باید همیشه پرش کند و اگر حرکت نکند، سقوط خواهد کرد. این رباتها دارای پایداری دینامیک هستند و در صورت بروز هر نوع اختلال میتوانند با تغییر مرکز ثقلشان و اعمال نیروهای اصلاحی برای جلوگیری از سقوط تعادل خود را حفظ کنند.
فایده تکپا بودن این است که میتواند در هر منطقهای با پرشهای خود حرکت کند زیرا قابلیت شتاب گیری و پرش از موانع بلندتر از گام معمولیش دارد. چون فقط یک پا وجود دارد، طراح میتواند توجهی به موقعیت پا نداشته باشد زیرا تنها یک پای قابل کنترل وجود دارد. عیب آنها طراحی و کنترل پیچیدهشان است.
یک ربات نمونه تکپا را میتوان با کنترل پارامترهایی چون وضعیت ربات، ارتفاع پرش و طول پرش ساخت.
وضعیت ربات
وضعیت ربات باید در هنگام دویدن به گونهای کنترل شود که بدنه ربات در همه حالات به خصوص در حال برگشت به زمین بعد از پرش، صاف باشد.
ارتفاع پرش ربات
رباتهای جهنده عموما پاهای قابل ارتجاع دارند؛ یک موتور یا محرک پا را تحریک کرده تا یک حرکت جهشی ایجاد کند. هر چه پرش بلندتر باشد، انرژی بیشتری نیاز دارد اما با این وجود این پرش بلند باعث رد شدن از موانع بلند میشود.
طول پرش ربات
ارتفاع و طول پرش سرعت حرکت ربات را تعیین میکند. هر چه ربات طولانیتر بپرد، سرعت حرکت بیشتری خواهد داشت.
ربات دوپا (Bipod)
از همان ابتدای طراحی رباتها، تحقیقات پیوسته در مورد رباتهای دوپا به ویژه رباتهای انساننما انجام گرفتهاست. ایجاد یک ربات که شبیه انسان باشد یعنی اینکه آنها را میتوان بدون هیچ تغییری در محیطهای مشابه کار انسان به کار گرفت. این به این معنی است که آنها ساخته شدهاند تا انسانها و رفتارهایشان را تقلید کنند.
6. ربات دوپا
رباتهای دوپا یا بایپادها پایداری دینامیک دارند و برای حفظ تعادل در هنگام ایستادن به الگوریتمهای کنترلی پیچیده نیاز دارند. رباتهای «ASIMO» از هوندا و «QRIO» از سونی نمونههای عالی از رباتهای دوپا هستند که میتوانند راه بروند، بدوند، بایستند و حتی برقصند. این رباتها با برنامهریزی قدمهایشان، پایداری خود را حفظ میکنند. هر قدم محاسبه شده و وزن به گونهای حرکت میکند که قدم بعدی پایداری ربات را برهم نزند. یک فایده ربات دوپا تعداد کم پاهاست که به وزن کمتر و هماهنگی کمتر بین دو پا نیاز داریم.
ربات سه پا (Tripod)
7. ربات 3 پا یا تریپاد
ربات های سه پا یا تریپادها، سه نقطه تماس با زمین دارند. برای اینکه یک ربات از نظر استاتیکی پایدار باشد، به حداقل سه نقطه تماس با زمین نیاز دارد. تعداد کمی از رباتها مانند STriDer (ربات آزمایشی دینامیک سهپایه خودتحریک) از RoMeLa با سه پایه ساخته شدهاست. از آنجایی که هیچ حیوان سه پا به طور طبیعی وجود ندارد (حداقل هنوز کشف نشده است)، مردم به ندرت وقت و پول را برای ساخت یک ربات سه پا سرمایهگذاری میکنند.
ربات چهارپا (Tetrapod)
راه رفتن با چهار پا برای اکثر حیوانات رایج است و دلیل خوبی برای تکرار آن در رباتها وجود دارد. رباتهای چهارپا یا تتراپادها دارای پایداری استاتیکی هستند و الگوی راه رفتن یک ربات چهارپا را میتوان به روشهای مختلف طراحی کرد:
8. ربات چهارپا
یک پا در یک زمان: در هر نقطه سه نقطه تماس با سطح وجود دارد و ربات در حالت ایستاده یا حرکت، پایداری استاتیک را حفظ میکند. حرکت دادن یک پا در یک زمان، موجب کندتر شدن ربات و بالا رفتن مصرف انرژی میشود، اما آن را پایدار نگه میدارد.
2. جفت متناوب: در این روش، پاهای متناوب به گونهای حرکت میکنند که گویی دو ربات دوپا به هم متصل هستند. در هر زمان ربات دارای دو نقطه تماس سطحی است که یک ربات پایدار دینامیک ایجاد میکند. سریعتر و کارآمدتر، اما در مقایسه با روش اول پایداری کمتری دارد.