
درحالیکه رباتها زندگی ما را در طول بیش از نیم قرن آسانتر کرده و راندمان خطوط مونتاژ را بهتر کردهاند، هنوز هم نتوانستهایم یک ربات همه منظوره انساننما بسازیم. بله میدانم که Boston dynamics و MIT تعدادی ربات انساننما دارند که میتوانند برای تفریح لگد زده یا ضربه بزنند، اما این رباتها با ربات انساننمای فیلم ترمیناتور در آخرالزمان، فاصله بسیار زیادی دارند!
البته ربات لازم نیست که انساننما باشد تا آن را همه منظوره در نظر بگیریم. رباتهای ماژولار، برخی از طراحیهای جالب هستند که مورد بررسی قرار گرفتهاند؛ این امر روشی در علم رباتیک است که از واحدهای کوچکتر استفاده کرده و پس از مونتاژ آنها، میتوان کار خاصی را به سرانجام رساند.
ما خود را غرق در موضوعاتی همچون آنچه اشاره شد کردهایم و به دنبال طرحهای ماژولار (درایور موتور، گونههای سنسور، طراحیهای دست و پا) هستیم تا ساخت رباتها را آسانتر بکند. هرکس میتواند در این زمینه نوآوری داشته باشد زیرا تصورات انسان محدودیتی ندارد. ماژولهای کامل ربات که با استفاده از ترکیب آنها میتوان یک ربات بزرگتر ساخت یک زمینه جذاب است که با چالش موجود اشاره شده همخوانی دارد. با من همراه شوید و نگاهی بر ماژولهای رباتیک موجود بیندازید و متوجه شوید که چه طرحهایی برای آینده پیشبینی شده است.
بسیاری از رباتها برای کارهای بزرگتر با یکدیگر ترکیب می شوند

مزایای رباتهای ماژولار
ظاهرا ایده مطرح شده بسیار مفید است اما اکثرا از این واقعیت غافل میشویم. میتوان از مجموعهای از رباتهای کوچک برای اجرای کارهای مختلفی همچون حرکت دادن، استفاده از ابزار و حل کردن بسیاری از مشکلات دیگر بهره برد. ربات میتواند تصمیم بگیرد بهترین راه اجرای یک کار چیست و شکل خود را برای اجرای هر گونه کار ضروری تغییر دهد. ویژگی مهم دیگر یک چنین رباتی این است که میتواند تعدادی از کارها را به صورت همزمان انجام دهد؛ مثلا، نصف ربات میتواند کار خاصی کرده و جسمی را نگه دارد و نصف دیگر از ابزاری بر روی جسم دیگری استفاده کند. ماژولار بودن دقیقا همان چیزی است که این نوع ربات را بسیار مفید کرده است. با این حال، یک ربات تکمنظوره همچون Baxter میتواند وظیفه انجام کاری خاص همچون استفاده از ابزار در خط مونتاژ را بر عهده بگیرد. ممکن است این ربات یک بازوی دیگر داشته باشد که بدون کار باقی ماندهاست. خوب است که این بازوی غیرعامل، قابلیت جدا شدن داشته باشد تا بتوان از آن برای کار مفید دیگری بهره برد. امتیاز دیگر ماژولار بودن این است که ربات ساخته شده با چنین اصولی محدود نیست و با پدیدار شدن یک خطا از کار نمیایستد. اگر اتفاقا آسیبی بر ربات برسد، ماژولهای خراب میتوانند تعویض شوند یا حتی اگر امکان تعویض سریع وجود نداشته باشد، تا زمان رسیدن قطعه لازم، دیگر واحدهای ربات میتوانند کار خود را ادامه دهند. بسته به طراحی، قسمتهای مختلف یک ربات ماژولار، بدون نیاز به اتصال و اینکه کجا هستند و چه کاری انجام میدهند، میتوانند با یکدیگر ارتباط داشته باشند.

قابلیت سازگاری ماژولهای مختلف و فواید آنها در آینده
زمانی که رباتها برای کارهای وسیع خارج از محیط کنترلشده کارخانه – جایی که کیفیت محل موردنظر قابل پیشبینی نیست – مورد استفاده قرار بگیرند، سازگاری تنها راه چاره است تا امکان استفاده از رباتها وجود داشته باشد. رباتهای چرخدار در مناطق سنگی کابوسی بیش نیستند. از رباتهای پادار در این مناطق میتوان استفاده کرد اما در هنگام حرکت در مناطق صاف، رباتهای پادار سرعت کمتری نسبت به رباتهای چرخدار دارند. پس به رباتی که میتوان ماژولهای مخصوص را بر آن سوار کرد، نیاز داریم تا در زمانهای لازم این ماژولها را به صورت خودکار از خود جدا کند.
محققین رباتهایی را تجسم میکنند که بتوانند به مناطقی که برای انسان غیرقابل دسترس است بروند مثلا به دنبال یک بلای طبیعی همچون زلزله، عملیات جستوجو و نجات در داخل خرابهها را انجام دهند.
رباتهای ماژولار میتوانند در چنین شرایطی موفق عمل کنند زیرا برخلاف رباتهای اولیه این توانایی را دارند تا با تغییر شکل، خود را با محیطها و فضاهای کوچکتر سازگار کنند. روش جالبی برای تجسم این موضوع در بخشی از تحقیقات انجام شده رباتهای سلولی در آزمایشگاه روباتیک RUS نشان داده شده است.
دیگر کاربردهای رباتهای سلولی در موقعیتهایی همچون کار در فضا است که وزن بسیار مهم است و کارهای چندمنظوره به زمان زیادی نیاز دارند. کاربردهای فراوان دیگری برای رباتهای سلولی وجود دارند و فواید آنها فقط مخصوص کاربردهای خاص همچون عملیات امداد پس از بلایا و اکتشافات فضایی نیست و تقریبا در همه جا میتوانند مفید باشند. راه دیگر برای فهم کامل برخی از کاراییهای آینده این رباتها این است که چگونه نویسندگان فیلمهای علمی-تخیلی از این رباتها بهره میبرند. نیل استفنسون در رمان خود با نام Seveneves تلاش کرده است تا استفاده از رباتهای ماژولار به عنوان نیروی کار در عملیات فضایی را با جزییات توضیح دهد.
سیاست این عصر به سمت دموکراسی حرکت میکند و رباتهای ماژولار نمونه کامل این سیاست هستند زیرا یک ربات کامل از تکههای کوچکتر تشکیل شده است.
ربات ماژولار Baxter
در حال حاضر، رباتهای ماژولار به اندازه رباتهای مفیدی مانند Baxter پیشرفت نکردهاند. اما کارهای جدی زیادی در آزمایشگاه دانشگاهها و جاهای دیگر برای پیشبرد دستگاههای پیشرفته انجام می شود. در سال 2013، آزمایشگاهی در MIT مجموعهای از بلوکها را ایجاد کرد که میتوانستند به طور مستقل حرکت کنند و خود را در پیکربندیهای شبکه مختلف مرتب کنند. اینها همان رباتهای سلولی اشاره شده هستند که مورد آزمایش قرار گرفتهاند. ماژولهایی که M-Blocks نامیده میشوند در ابتدا از این نظر محدود بودند که از راه دور کنترل میشدند و فقط میتوانستند در یک جهت نسبی حرکت کنند. برای اثبات مفهوم آنها میتوان گفت که چشمگیر بودند و پیشرفتشان ادامه یافته است.

ربات تغییر شکل دهنده SMORES
نتایج جالب دیگر در این زمینه در آزمایشگاهی با نام ModLab در دانشگاه شهر پنسیلوانیا به دست آمدهاند. آنها در حال حاضر بر روی پروژههای مختلفی همچون خرپاها با ساختار متغیر، ربات پرنده تک محرک و البته ربات ماژولار تغییرشکلدهنده SMORES کار میکنند.
این رباتها 4 درجه آزادی حرکتی دارند و آهنربای تحریکشده به آنها این توانایی را میدهد تا با ماژولهای دیگر و سطوح فلزی تعامل داشته باشند. این یکی از ماژولهای چندمنظورهای است که تاکنون دیدهایم، اما آنها همچنان مشکلاتی مشابه سایر رباتهای ماژولار دارند که برقراری ارتباط با مجموعهای از اشیاء و تصمیمگیری به روش غیرمتمرکز برای انجام وظایف به بهترین شکل مهمترین آنهاست.
با افزایش تعداد ماژولها یا واحدها، کنترل تعداد زیادی از اشیاء بدون ساختار کنترل مرکزی نیز به طور تصاعدی سختتر میشود. با این حال، برای الهام گرفتن در مورد راهحل موثر برخورد با این مانع، میتوان به گروههای بزرگی از پهپادها نگاه کرد که میتوانند برای کنترل توسط یک نفر برنامهریزی شوند، اما همگی بهعنوان یک گروه، در هماهنگی با یکدیگر، بر اساس مجموعهای از قوانین از پیش تعیینشده عمل میکنند. آزمایشگاهی در MIT توانست یک الگوریتم کنترل غیرمتمرکز را برای این «شلوغی» پهپادها توسعه دهد که به آنها اجازه میدهد در حالی که میتوانند یک فرمان کنترل کلی را دنبال کنند، به روشهای کارآمدتری عمل کنند. پروژههای مشابهی را برای جهتیابی شلوغیهای زمینی نیز دیدهایم که میتوانند به روش تعیینشده قبلی عمل کنند، اما همچنان ماژولار بودن را به عنوان یک اصل مهم همراه دارند.
ربات ماژولار Dtto
بدون دست، بدون پا، فقط ماژولها
مشکل اصلی دیگر طرح M-block (به یاد داشته باشید که این طرح اصلا برای استفاده در رباتهای ماژولار هدفگذاری نشده بود) این بود که این ماژولها به صورت خودکار قادر به کنترل چیزی نبودند و فقط میتوانستند در ارتباط با دیگر ماژولها حرکت کنند. اینجا بود که رباتهای ماژولار همچون Dtto توانسنتد در مسیر پیشرفت قدم بردارند.
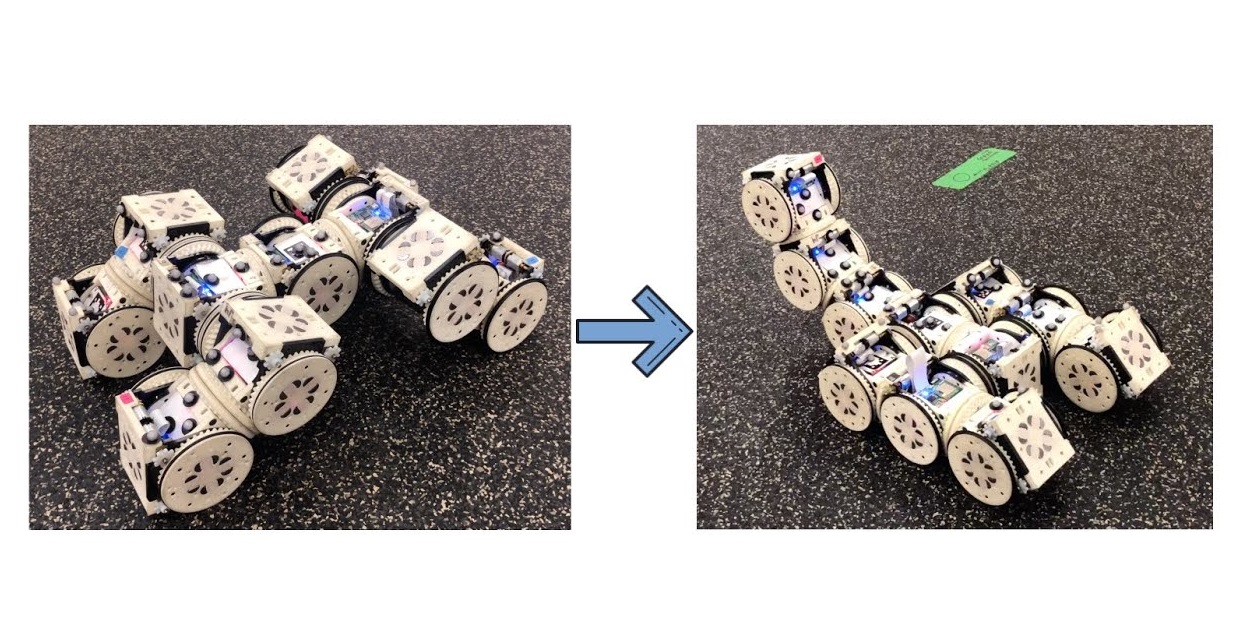
Dtto بر اساس یک طرح دو قسمته ساخته شده است که توسط یک لولا به هم متصل شدهاند. قسمت بیرونی هر نیمه قادر است به ماژول Dtto دیگری متصل شود که خود یک لولا در وسط دارد. هر ماژول میتواند لولای خود را کنترل کند و در نتیجه ربات میتواند به راحتی با نیروی خود حرکت کرده و بخشهایی از خود را به دلخواه از 10 مکان مختلف در هر ماژول متصل و جدا کند. این ربات به صورت خارقالعادهای همه کاره است زیرا به ازای هر ماژول اضافه شده، یک درجه آزادی افزایش می یابد و این افزایش درجه آزادی، برای هر نوع کار خاص که نیاز به حرکتهای مستقیم و زاویهای دارد، کار را راحتتر میکند.

ربات Dtto با شایستگی برنده جایزه بزرگ سایت Hack a day در سال 2016 شد. این پروژه این دید را به ما داد که چنین رباتی چگونه میتواند در عمل کارایی داشته باشد. در این پروژه هیچ دستور مرکزی برای ماژولها پیشبینی نشده بود و به آنها این اجازه داده شده بود تا برای دستیابی به هدفی خاص به صورت گروهی تصمیم بگیرند چگونه تغییر شکل دهند.

آلبرتو مولینا (Alberto Molina) کار بر روی این طرح را ادامه داد. در ادامه نمایشی از یک سیستم بهبودیافته ارائه شده است که چرخش صورت را به طرح اصلی اضافه کردهاست.
ماژولهای تشکیلدهنده یک ربات Dtto به صورت بیسیم با یکدیگر ارتباط دارند، ارزان هستند (یکی از ویژگیهای کلیدی رباتهای ماژولار)، میتوانند به راحتی پرینت سه بعدی شوند و از سخت افزار گرفته تا نرم افزار کاملاً منبع باز هستند. گروههای مختلفی روی رباتهای Dtto خود کار کردهاند و حضور گروههای مختلف، دستهای بیشتری را برای اضافه کردن به طراحی نرمافزار و به سرانجام رساندن کارهای عالی به همراه خواهد داشت.
عوامل محدودکننده رباتهای ماژولار
درحالیکه دنیای رباتهای ماژولار در حال رشد و گسترش است، انتظار داریم توسعههای فراوانی در این زمینه صورت بگیرد. برای اینکه این ایده عملی شود، نیاز به ماژولهای کوچکتر، فشردهتر و قویتر داریم که بتوانند حجم بزرگتری از ابزار مونتاژ را جابجا کنند. آنها همچنین باید توانایی خود برای برقراری ارتباط با یکدیگر را بهبود بخشند و تعداد بیشتری از ماژولها را پشتیبانی کنند. نوشتن برنامه نرمافزاری این رباتها به اندازه ساخت سختافزار موردنیاز آنها دشوار خواهد بود. رباتهای ماژولار بدون اینکه حتی بدانند چه شکلی خواهند داشت، نیاز به حل مشکل دارند.
اما این مسائل قطعا ارزش زمان و تلاش ما را دارد. سودمندی یک ربات خود محور که میتواند بدون مداخله بر قطعات خراب غلبه کند، تحولی شگرف خواهد بود.
منبع:
https://hackaday.com/2018/05/10/modular-robotics-when-you-want-more-robots-in-your-robot/



