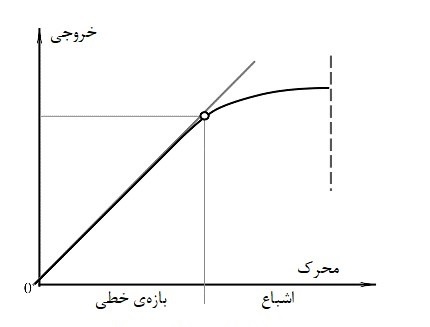
هر سنسوری، محدودیتهای کاری خود را دارد. حتی اگر خطی هم درنظر گرفتهشود؛ دربرخی از سطوح محرک ورودی، سیگنال خروجی آن دیگر پاسخگو نخواهد بود. افزایش بیشتر محرک نیز خروجی مطلوبی ایجاد نمیکند. در چنین حالتی گفته میشود که سنسور، یک غیرخطی بودن (nonlinearity) یا اشباع انتهای بازه (Span-end) را نشان میدهد. (مانند شکل زیر)
1. تابع انتقال سنسور با اشباع
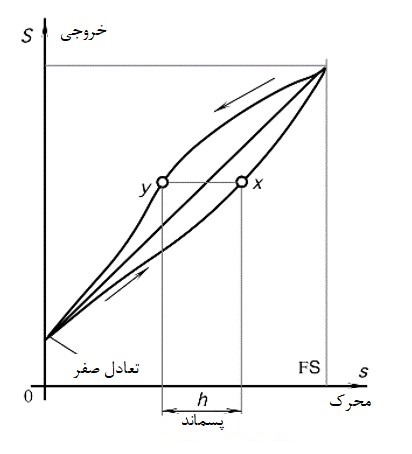
هیسترزیس یا پسماند سنسور
خطای هیسترزیس یا پسماند در واقع میزان اختلاف خروجی اندازه گیری شده توسط سنسور در یک سیگنال ورودی مشخص است زمانیکه که ورودی طی یک چرخه مشخص در شرایط یکسان افزایش و کاهش می یابد ( شکل 2).
برای مثال یک سنسور جابجایی (Displacement Sensor) را در نظر بگیرید. ولتاژ خروجی این سنسور برای جسمی که در نقطه ی معین از چپ به راست حرکت میکند، 20 میلی ولت با خروجی حالتی که جسم از راست به چپ حرکت میکند اختلاف دارد. اگر حساسیت سنسور 10 میلی ولت بر میلی متر باشد، خطای هیسترزیس یا خطای پسماند بر حسب واحدهای جابجایی 2 میلی متر است.
دلایل رایج ایجاد پسماند در سنسورها اصطکاک (Friction) و تغییرات ساختاری (Structural Changes) مواد سازنده آنها هستند و به تکنولوژی ساخت سنسور نیز مرتبط اند.
2. تابع انتقال سنسور با پسماند
منبع :
Jacob Fraden. Handbook of Modern Sensors: Physics, Designs, and Applications. 2016