
همجوشی یا ترکیب سنسورها (Sensor Fusion) فرآیندی است که در آن ورودیهای چند سنسور با هم ترکیب شده و یک مدل یا تصویر واحد از محیط یا بستر مورد بررسی ارائه میدهد.
هر نوع سنسور یا قطعه صنعتی دارای نقاط ضعف و قوت مخصوص به خود است. همجوشی یا ترکیب سنسورها (Sensor Fusion) فرآیندی است که در آن ورودیهای چند سنسور با هم ترکیب شده و یک مدل یا تصویر واحد از محیط یا بستر مورد بررسی ارائه میدهد. چنین مدلی نسبت به مدل منفرد بدست آمده از یک حسگر، دقت بالاتری دارد، زیرا در همجوشی، عملا نقاط ضعف هر سنسور توسط سنسور دیگر جبران میشود. در فرآیند ترکیب حسگرها، دادههای مجموعهای از حسگرهای ناهمگن جمعآوری شده و با استفاده از الگوریتمهای نرمافزاری، مدلهایی جامعتر و دقیقتر از دادهها و محیط مورد بررسی ساخته میشود.
در این نوشتار، به بررسی مقدماتی همجوشی سنسورها پرداخته و نگاهی به کاربردهای یادگیری ماشین در بهینهسازی الگوریتمهای ترکیب سنسورها خواهیم پرداخت. همینطور کاربردهای ترکیب سنسورها در پیادهسازی رویکردهای اینترنت اشیا در صنایع (IIoT) را بررسی کرده و در انتها به تلاشهای جوامع صنعتی برای استانداردسازی در حوزه ترکیب حسگرها اشاره خواهیم کرد. موارد دیگری چون سطوح و معماریهای ترکیب حسگرها، کاربرد همجوشی سنسورها در ساخت رباتها و در انتها کاربرد این فناوری در وسایل نقلیه آبی، زمینی و هوایی، مواردی هستند که در نوشتارهای آینده به آنها خواهیم پرداخت.
اهداف ترکیب سنسورها
هرچند که هدف نهایی ترکیب حسگرها ارائه مدلی دقیقتر و جامعتر از محیط بستر مورد بررسی است، در عین حال، این فرآیند اهداف دیگری را نیز دنبال میکند:
- رفع تناقضهای عملکردی بین سنسورها
- همگامسازی خروجیهای حسگرها، با در نظر گرفتن تفاوتهای زمانی بین ارائه نتایج توسط سنسورها.
- استفاده از مجموعهای از سنسورهای ناهمگن، برای ارائه خروجی بزرگتر از مجموع ورودیها.
- شناسایی خرابیهای احتمالی سنسورها از طریق رصد عملکرد سنسور، و تشخیص تولید خروجی نادرست در مقایسه با سایر سنسورها.
ترکیب ژیروسکوپ، مغناطیس سنج و شتاب سنج
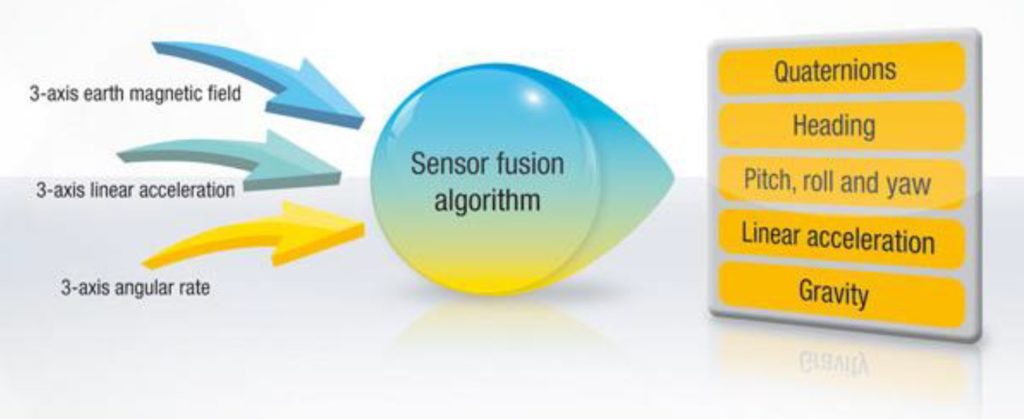
از ترکیب حسگرها میتوان در ایجاد قطعاتی با امکان جهتگیری 9 محوره استفاده کرد. این قابلیت به پلتفرمهای مستقل امکان میدهد تا با آگاهی بالاتری تصمیم گرفته و اقدامات هوشمندانهتری انجام دهند. ترکیب یک ژیروسکوپ، مغناطیسسنج و شتاب سنج، میتواند مزایایی مشابه یک حسگر ارائه داده و در عین حال، نقاط ضعف هر یک از آنها به صورت منفرد را حذف کند:
- ژیروسکوپ، حرکت، گام و چرخش آنی را ردیابی کرده و تحت تاثیر فشار جو، ارتعاش یا میدان مغناطیسی متغیر قرار نمیگیرد. در عین حال، مقدار مطلق و ثابت نداشته و میتواند در طول زمان تغییر کند.
- شتابسنج جهت گرانش و مغناطیسسنج، جهت میدان مغناطیسی زمین را ردیابی میکند؛ در عین حال هر دوی آنها دارای مقدار مطلق (در طولانی مدت) بوده، هرچند که نسبت به شتاب، ارتعاش و تداخل ناشی از تغییر میدان حساس هستند.
مراحل ترکیب حسگرها
همجوشی یا ترکیب سنسورها فرآیندی پیچیده شامل: جمعآوری، فیلترسازی و تجمیع دادههای بدست آمده از سنسورهاست تا از این طریق، درک بهتری از محیط مورد بررسی انجام شده و تصمیمات هوشمندانهتری گرفته شود:
در مرحله یا سطح اول، دادههای ورودی خام از حسگرها جمعآوری میشود.
در مرحله یا سطح دوم، فرآیندهایی چون فیلترسازی، همگامسازی زمانی و مکانی دادههای حسگرهای گوناگون و مدلسازی عدم قطعیت (از طریق مقایسه خروجی سنسورهای مختلف) انجام میشود.
در مرحله یا سطح سوم، شناسایی اجسام و استخراج ویژگی از آنها به منظور ارائه تصویری از اندازه، شکل، رنگ، سرعت یا سایر ویژگیهای آنها انجام میشود.
در مرحله یا سطح چهارم، نتایج حاصل از سطح سوم جمعآوری میشوند. از میان این دادهها، اجسام و اشیا موردنظر و مسیر حرکت آنها شناسایی شده تا مدلی پویا و دقیق از محیط ایجاد کند.
یادگیری ماشین در فیوژن سنسورها
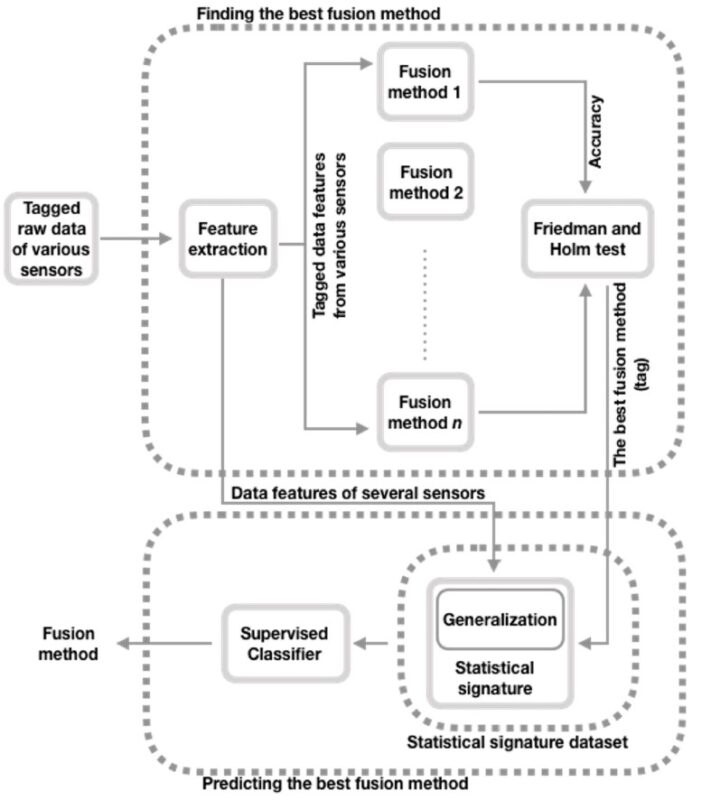
استخراج و تجمیع ویژگیها، یکی از مراحل مهم و حیاتی فرآیند ترکیب حسگرهاست. امروزه از الگوریتمهای یادگیری ماشین (machine learning) به منظور مقایسه متدولوژیهای مختلف فیوژن و سپس، شناسایی راهحل بهینه برای پیادهسازی ترکیب مجموعهای از سنسورها در یک کاربرد خاص استفاده میشود. ماشین لرنینگ موارد زیر را به کار میگیرد:
- آزمون فریدمن (Friedman’s rank test)، که یک آزمون آماری ناپارامتریک بوده و از آن برای تشخیص تفاوت دقت خروجیهای حاصل از روشهای همجوشی متفاوت استفاده میشود.
- آزمون هولم (Holm’s test)، که از آن به منظور محاسبه احتمال رخداد مثبت کاذب (false positive) استفاده میشود. در این مورد، آزمون هولم از طریق تغییر محدودیت رد فرضیه، در تک تک فرضیههای مورد بررسی انجام میشود.
آزمونهای گفته شده میتوانند برای بررسی مواردی چون تفاوت دقت بین استخراج و استفاده از دادهها به صورت خام و یا استفاده از آنها به صورت تجمیعشده، همینطور بررسی سایر الگوریتمهای یادگیری ماشین مانند رویکردهای Voting، Stacking و AdaBoost استفاده شوند.
نقش ترکیب سنسورها در پیادهسازی اینترنت اشیا در صنعت

فیوژن سنسورها نقش زیادی در استفاده از ظرفیتهای اینترنت اشیا در صنایع دارد. ترکیب سنسورها این امکان را میدهد تا از طریق تولید بلادرنگ دادهها، جلوی خرابیهای ناگهانی و برنامهریزی نشده را گرفت. یکی از کاربردهای همجوشی حسگرها، ایجاد رویکردهای متفاوت نسبت به اندازهگیری مقادیر است. به طور مثال، نظارت بر دمای تجهیزات، بدون بررسی دمای محیط میتواند نتایج نادرستی ارائه دهد.
از سوی دیگر، ترکیب سنسور لرزش با سنسور سرعت میتواند اطلاعات بهتری در مورد وضعیت موتور و جعبه دنده ارائه دهد. ارتباط دادههای ارتعاشات و دادههای سرعت میتواند ناهماهنگیهای شفت یا سایش یاتاقان را شناسایی کند؛ این درحالیست که شناسایی این مورد، تنها با یک سنسور منفرد امکانپذیر نیست.
مجموعههای پیچیدهتری از حسگرها میتوانند به صورت همزمان برای تجزیه و تحلیل پارامترهای عملیاتی مورد استفاده قرار گیرند. در نتیجه، سنسورهای مورد استفاده در IIoT به صورت ترکیبی از دو، سه یا چهار سنسور در کنار یکدیگر در قالب یک پکیج عرضه میشوند.
عرضه سنسورها به این شیوه، پیچیدگی و هزینههای سیستم را کاهش داده و در عین حال، مزایای حاصل از همجوشی سنسورها را چند برابر میکند. امروزه طیف وسیعی از کاربردهای اینترنت اشیا مانند: فناوریهای پوشیدنی (گجت های پوشیدنی)، دستگاههای پزشکی، هواپیماهای بدون سرنشین، سیستمهای صنعتی و حمل و نقل از این شیوه عرضه سنسورها برای نظارت بر فشار، دما، نیرو، ارتعاش و … استفاده میکنند.
استانداردهای ترکیب حسگرها
از شروع ایجاد استانداردهایی برای فناوری ترکیب حسگرها زمان زیادی نمیگذرد. در ادامه به دو نمونه اشاره خواهیم کرد: در مورد اول، به رابطهایی اشاره خواهیم کرد که پل ارتباطی حسگرها و واحدهای همجوشی حسگرها خواهند بود. در مورد دوم به توسعه شبکهای از حسگرها اشاره خواهیم کرد که شکاف بین حسگرهای سنتی (مانند رادارها، لیدارها و دوربین) و شبکههای ارتباطی مبتنی بر زیرساخت را پر خواهند کرد و به نوعی، پل ارتباطی بین این دو حوزه خواهند بود.
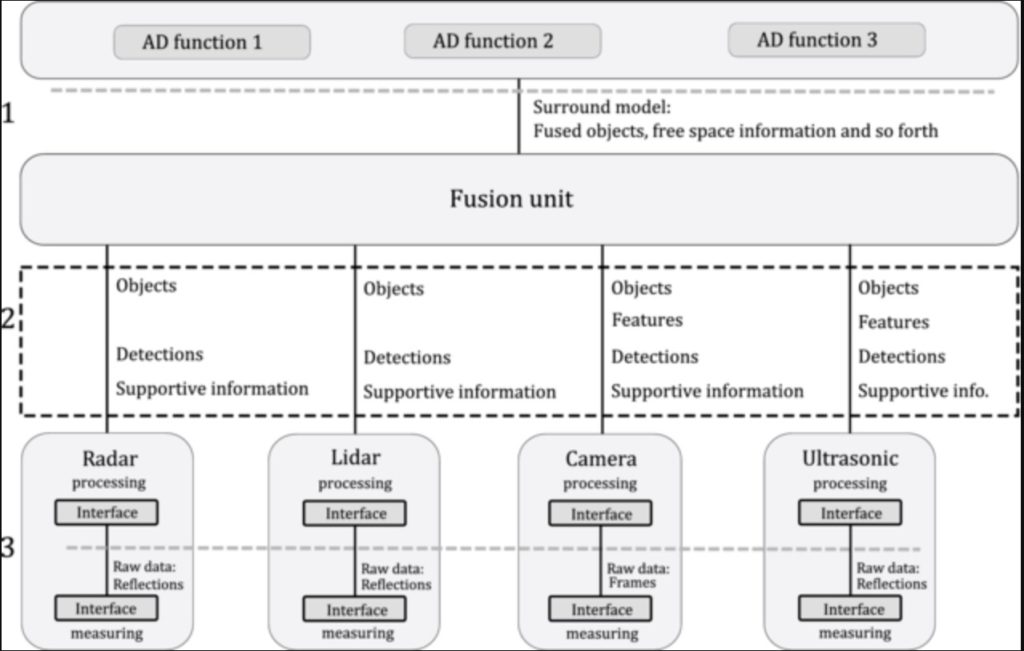
ایجاد رابط بین سنسورهای منفرد و واحد ترکیب سنسورها، قابلیت استفاده مجدد از کاربردهای فیوژن را به حداکثر رسانده و زمان ایجاد ارتباط بین سنسورها و واحد فیوژن را به حداقل میرساند. این دو مورد، اهدافی هستند که توسط استاندارد ISO 23150:2021 دنبال میشوند. این استاندارد، رابط منطقی بین واحد ترکیب (که محیط اطراف خودرو را با استفاده از مدلهای همجوشی یا فیوژن تفسیر میکند) و سنسورهای ادراک محیط که در داخل خودرو نصب هستند (مانند رادارها، لیدارها، دوربینها و اولتراسونیک) را تعریف و مشخص میکند. این رابط منطقی در استاندارد ذکر شده، به صورت ماژولار و معنایی توصیف شده و اطلاعاتی در خصوص شرایط جسم موردبررسی (مانند اجسام در حال حرکت، خودروها و اجسام ساکن)، همینطور اطلاعاتی در سطح ویژگیها و شرایط (مبتنی بر اطلاعات مربوط به سنسور) فراهم میکند. تمرکز استاندارد ISO 23150:2021 بر رابط سطح 2 تعریف شده است:
- رابط سطح 1 بالاترین سطح رابط منطقی است و واحد همجوشی را به واحد خودکارسازی رانش خودکار اتومبیل مرتبط میسازد.
- رابط سطح 2 رابط منطقی میانی بوده و سنسورهای منفرد یا خوشهای از آنها را به واحد همجوشی سنسورها مرتبط میکند (تمرکز استاندارد ISO 23150:2021 بر این سطح است).
- رابط سطح 3، رابط مورد استفاده در سطح سنسورهای منفرد میباشد.
به منظور بهبود و تقویت شبکههای حسگر خودروها، استانداردهای ارتباطی جدیدی در حال شکلگیری هستند. در این مورد میتوان به پلتفرمهای سیستم حمل و نقل هوشمند G5 (ITS-G5) و پلتفرم سلولی V2X (C-V2X) اشاره کرد. ITS-G5 توسط تعداد زیادی از شرکتهای خودروسازی پذیرفته شده، در عین حال C-V2X همزمان با اقبال مالکان زیرساختهای جادهای و شرکتهای خودروسازی به آنها، در حال رشد است.
استاندارد ITS-G5
استاندارد ITS-G5 به طور مشترک توسط کنسرسیوم CAR 2 CAR و موسسه استاندارد ارتباطات اروپا (ETSI) توسعه داده شده است. این استاندارد با بهرهگیری از فناوری ارتباطات کوتاهبرد اختصاصی (DSRC)، وسایل نقلیه را قادر میسازد تا مستقیما با خودروهای بدون زیرساخت سلولی، ارتباط برقرار کنند. ITS-G5 را میتوان یک شبکه حسگر دانست که بر روی سنسورهای موجود در اتومبیلها مانند دوربین و رادار نصب شده و آنها را به شبکههای ارتباطی مبتنی بر زیرساخت متصل میکند.
استاندارد C-V2X
استاندارد C-V2X به منظور ارتباط مستقیم بین وسایل نقلیه و محیط اطرافشان، نسبت به استاندارد دیگر جدیدتر محسوب میشود. این استاندارد توسط 3GPP و براساس فناوری مودم سلولی، تعریف شده و لایه دسترسی آن متفاوت از فناوری ارتباطات کوتاهبرد اختصاصی (به کار رفته در استاندارد ITS-G5) عمل کرده و قابلیت تعامل با آن را ندارد. علیرغم موارد گفته شده، هر دو استاندارد ITS-G5 و C-V2X بر هدف مشابهی تمرکز داشته و تلاشهایی برای توسعه راهحلهای قابل همکاری در حال انجام است.
|
موضوع
|
DSRC 802.11p
|
C-V2X Rel.14/15
|
|---|---|---|
|
هدف
|
ارتباط امن، مستقیم و درلحظه بین خودروها و سایر المانهای جاده (راننده، افراد پیاده، اپراتورهای حمل و نقل و ...)، همینطور بین خودروها و زیرساختهای جادهای
|
|
|
زمان استقرار
|
سال 2017 (استفاده در بعد انبوه از سال 2019)
|
استقرار اولیه در سال 2021
|
|
اتصال سلولی
|
مدل هیبریدی. در مورد خدماتی که نیازمند تامین ایمنی نیستند، با انواع شبکههای سلولی مانند 4G و G5 قابلیت کارکرد دارند.
|
|
|
خود مدیریتی
|
اپراتورهای تلفن همراه میتوانند به صورت اختیاری و با استفاده بیشتر از شبکه، کنترلهای نظری بلادرنگ اعمال کنند.
|
|
|
فناوری ارتباطی
|
OFDM در کنار CSMA امکان ایجاد ارتباطی آرام در محیطی متراکم و پویا فراهم میکند، در حالیکه وابستگی به GPS در این مورد وجود ندارد.
|
SC-FDM با سنجش نیمه-پایدار فناوری کدگذاری با استفاده از کدگذاری توربو و HARQ
|
|
امنیت
|
رمزگذاری کلیدعمومی فقدان عایق V2X ریسک سایبری را افزایش میدهد.
|
|
|
سرمایهگذاری در زیرساخت
|
استفاده از دوربینها و چراغهای راهنمایی و رانندگی در زیرساختها میتواند ایمنی را افزایش دهد.
|
|
|
نقشه راه
|
هدف 802.11: قابلیت همکاری با 802.11p
|
هدف C-V2X Rel.16: عملکرد مبتنی بر NR(5G). عملکرد متفاوت نسبت به Rel.14/15
|
خلاصه فیوژن سنسور
ترکیب حسگرها فناوری رو به رشد و مهم دنیای امروز است که در کاربردهای مختلف، از مراقبتهای بهداشتی گرفته تا وسایل نقلیه خودکار (ADAS)، سیستمهای صنعتی و حتی کالاهای مصرفی استفاده میشود. این فناوری میتواند اندازهگیری و خروجیهای چندین سنسور را یا هم ترکیب کرده و به این ترتیب، تصویر و مدل کاملتری از عملکرد تجهیزات یا محیط اطراف وسایل نقلیه خودکار ارائه دهد.
هرچند که ترکیب سنسورها حوزه جدیدی نیست، اخیرا تلاشهایی برای اعمال رویکردها و الگوریتمهای ماشین لرنینگ به منظور توسعه سیستمهای مبتنی بر همجوشی حسگرها، صورت گرفته است. در عین حال اقداماتی نیز به منظور استانداردسازی در این حوزه انجام شده تا از این طریق، قابلیت بکارگیری این حوزه در پلتفرمهای مختلف فراهم شده و مزایای بکارگیری این فناوری را تقویت کند. در مقالات آتی به بررسی سایر سطوح ترکیب حسگرها و معماریهای آن، به طور مثال نحوه استفاده از آن در کاربردهای اینترنت اشیا خواهیم پرداخت.



