
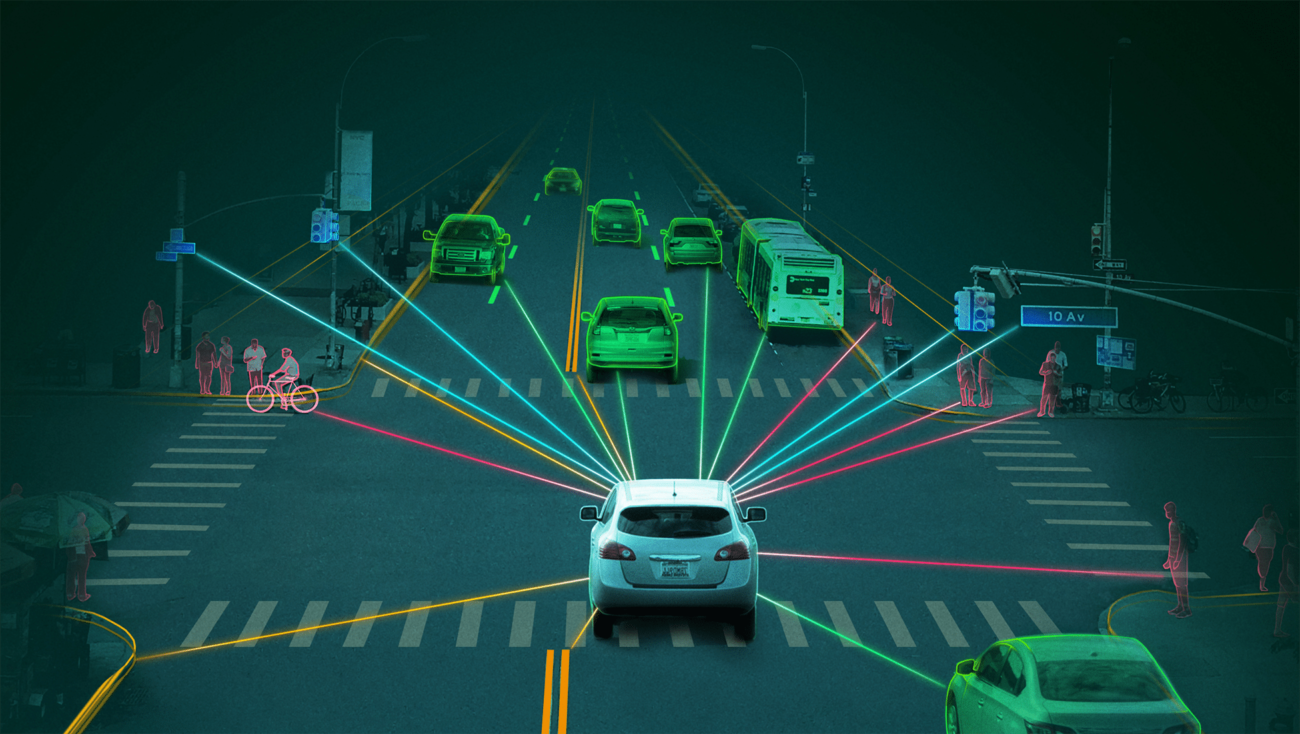
ماشین های خودران (Self-driving Cars) نیز مانند انسانها برای رانندگی ایمن، نیازمند درک محیط اطراف خود هستند.
از اوایل قرن 20 ام، علاقه و توجه افراد به ماشینهای خودران افزایش زیادی پیدا کرده است. بسیاری از افراد آینده این خودروها را همراه با افزایش سطح امنیت رانندگی و سهولت استفاده از خودروها، همینطور بدون درگیری با فرآیندهای رانندگی پشت فرمان، پیشبینی میکنند.
یادگیری نحوه عملکرد خودروهای خودران، به آمادگی برای استفاده از این محصولات در آینده کمک خواهد کرد. این نوع اتومبیلها به منظور درک دقیق از محیط و بررسی ایمن بودن آن، از فناوریهایی چون رایانهها، سنسورها، الگوریتمها، ماشین لرنینگ و هوش مصنوعی استفاده میکنند.
در این مقاله به بررسی سیستمهای پیچیده سنسورها که در اتومبیلهای خودران مورد استفاده قرار میگیرند خواهیم پرداخت.
انواع سنسورها در اتومبیلهای خودران
ماشین های خودران هم مانند انسانها برای رانندگی ایمن، نیازمند درک محیط اطراف خود هستند. افراد از حواس 5 گانه به منظور تعامل با محیط اطراف خود استفاده میکنند. به منظور شبیهسازی این حواس، از سیستمهای حسگر پیشرفته در ساخت خودروهای خودران استفاده میشود.
سنسور لیدار برای رصد محیط
لیدارها، که از آنها با عنوان اسکنر لیزری 3 بعدی نیز یاد میشود، به منظور اسکن محیط اطراف با استفاده از نور لیزر مورد استفاده قرار میگیرند. لیدارها در حالت معمول، هزاران پرتو لیزر مادون قرمز را به اطراف تابانده و انعکاس این پرتوها را از محیط دریافت میکنند. این پالسها در فضا از نظر ظاهری تشکیل یک ابر نوری سه بعدی خواهند داد.
لیدار، مدت زمان بین انتشار سیگنالهای لیزر به سمت هدف و گرفتن انعکاس آن پرتوها توسط آشکارساز را محاسبه میکنند. این سیستمها از سرعت نور به منظور محاسبه فاصله بین اجسام استفاده میکند. هرچه مدت زمان دریافت انعکاس پرتو توسط آشکارساز طولانیتر شود، جسم هدف در فاصله دورتری قرار دارد.
سیستمهای لیدار؛ ماشین های خودران را قادر میسازند تا اجسام کوچک را با دقت بالایی شناسایی کنند. با این حال، لیدارها اغلب در شب یا آب و هوای نامساعد عملکرد قابل اعتمادی ندارند.
تشخیص اطلاعات محیط با سنسورهای رادار
رادارها در زمینههای مختلفی چون پیشبینی آب و هوا، نجوم، ارتباطات، ناوبری اقیانوسها، عملیات نظامی و رانندگی خودکار نقش ایفا میکنند.
اتومبیلهای خودران میتوانند با استفاده از فرستندههای رادار، امواج رادیویی را در جهتهای شناخته شده ساطع کنند. امواج بازتاب شده به خودرو کمک میکنند تا زوایا، ابعاد و سرعت اجسام اطرافش را محاسبه کند.
هرچند رادار در فواصل طولانی و در شرایط آب و هوایی مختلف به خوبی کار میکند، اما در شناسایی نوع اجسام عملکرد خوبی نداشته و احتمال شناسایی اشتباه اجسام توسط آن وجود دارد.
استفاده از سونارها در شبیهسازی حس شنوایی
ماشین های خودران از سونار برای تشخیص اشیا و ارتباط با آنها و سپس جهتیابی درست استفاده میکنند. سنسور سونار میتواند عملکرد فعال (active) یا غیرفعال (passive) داشته باشد. سونارهای پسیو صداهای ایجاد شده توسط اجسام نزدیک به آنها را شنیده و دریافت میکنند. اما سونارهای اکتیو، پالسهای صوتی منتشر کرده و پژواک برگشتی از اجسام را دریافت میکنند.
اتومبیلهای خودران از سونار برای تشخیص اجسام ساخته شده از موادی چون فلز یا سرامیک، که در فواصل کوتاه نسبت به آنها قرار دارند، استفاده میکنند. هرچند عملکرد سونار به نور وابسته نیست، اما تحت تاثیر سرعت صوت (که کندتر از سرعت نور است) بوده و امکان تشخیص اشتباه اجسام توسط آن وجود دارد.
سنسور تصویر برای عکسبرداری از اجسام
ماشین های خودران میتوانند محیط اطراف خود را با استفاده از تصاویر ثبت شده توسط سنسورهای تصویر دوربینهای دیجیتال؛ مجسم کنند. این خودروها با استفاده از تصاویر به دست آمده و متدهایی که بینایی انسان را شبیهسازی میکنند (computer vision) به “دیدن” و تفسیر جزئیات محیطی (مانند علائم و چراغهای راهنمایی و رانندگی یا حیوانات جاده) میپردازند.
ورودی متدهای بینایی ماشین در خودروهای خودران متنوعاند، مانند:
- دادههای چندبعدی به دست آمده از اسکنرهای 3 بعدی
- ویدئوها
- تصاویر گرفته شده از زوایای مختلف به دست آمده از دوربینها
خودروهای خودران میتوانند اشیا را تشخیص دهند، حرکت خودرو را کنترل کنند و صحنههای سه بعدی را با دادههای تصویری مدل کنند.
همانند سایر سیستمهای حسگر، دوربینها نیز نقاط قوت و محدودیتهایی دارند. این سنسورها هرچند وضوح بالایی دارند، اما در هر نوع آب و هوایی به خوبی کار نکرده و فقط دادههای بصری ارائه میدهند.
سنسورهای IMU برای تشخیص حرکات
سیستمهای ناوبری اینرسیایی، مشابه دستگاههای سنجش لختی (IMU) (به طور مثال شتابسنج و ژیروسکوپ) حرکات خودرو را رصد میکنند. این قطعات به ثبات حرکت اتومبیلهای خودران کمک کرده و به آنها در تصمیمگیری نسبت به اجرای اقدامات ایمنی (مثل باز شدن کیسه هوا یا جلوگیری از واژگونی خودرو) کمک میکنند.
ردیابی موقعیت با سنسور GPS
ایالات متحده مالک یک سیستم ناوبری رادیویی مشتمل بر 24 ماهواره در فضاست که از آن با نام سیستم موقعیتیابی جهانی (GPS) یاد میشود.
اتومبیلهای خودران از سنسور GPS در تعیین موقعیت جغرافیایی (طول و عرض جغرافیایی) خود در فضا استفاده میکنند. این اتومبیلها ترکیبی از مختصات بدست آمده از GPS و دادههای نقشههای دیجیتال مانند Google Maps را برای جهتیابی و حرکت خود به کار میگیرند.
دادههای GPS معمولا تا شعاع 5 متری دقیق هستند. به منظور جبران خطای این دادهها و بهبود دقت مکانیابی، خودروهای خودران از تکنیکهای پردازش داده مانند فیلتر ذره ای (particle filtering) استفاده میکنند.
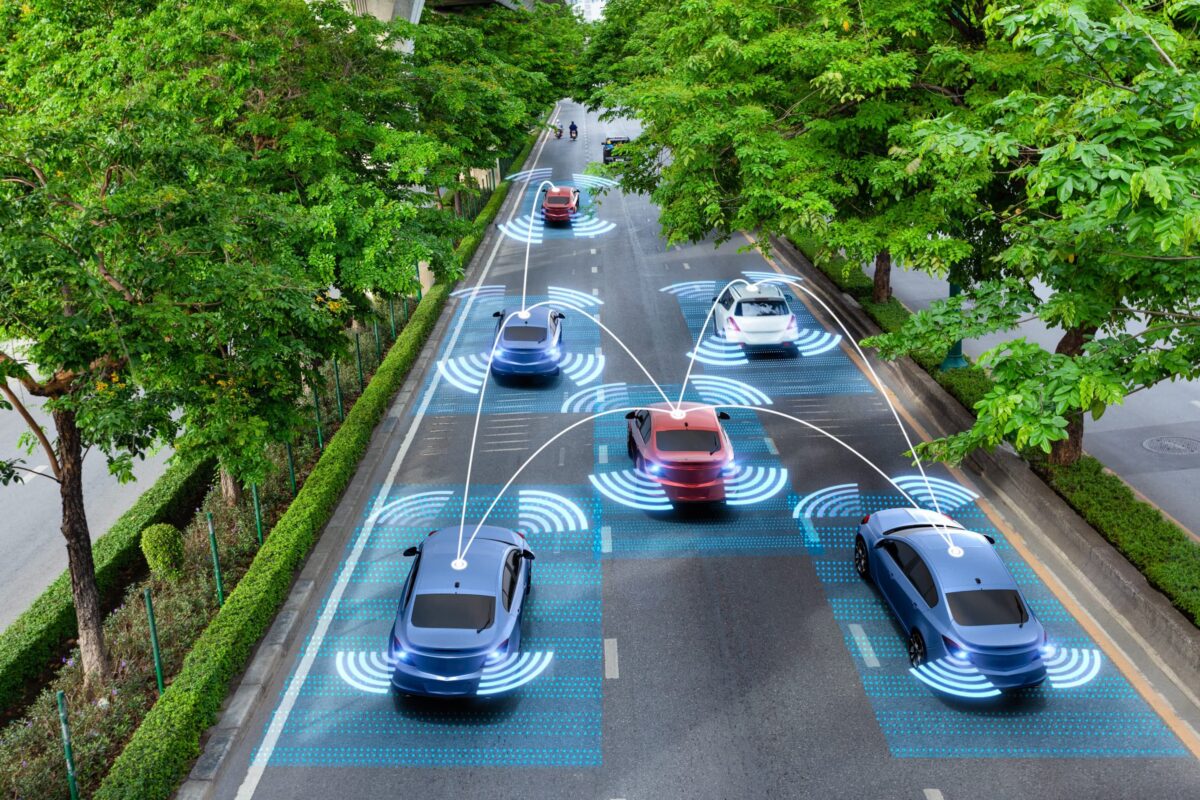
استفاده بهینه از حسگرها در ماشین های خودران
خودروهای خودران سنسورهای زیادی داشته و عملکرد بسیاری از آنها با هم همپوشانی دارد. دلیل این همپوشانی نیز سیستم عملکرد مبتنی بر پشتیبانی در آنهاست؛ به این معنا که در صورت عدم کار یکی از سنسورها، سنسور دیگر عمل آن را انجام خواهد داد. به این ترتیب امکان استفاده از نقاط قوت انواع مختلف سنسورها فراهم میشود.
توسعهدهندگان صنعت ماشینهای خودران از تکنیکهای جدید پردازش داده مانند فیوژن یا ترکیب حسگرها، برای پردازش اطلاعات بدست آمده از چندین سنسور، به طور همزمان و به صورت بلادرنگ، استفاده میکنند. ترکیب سنسورها میتواند روشهای تفسیر و واکنش ماشینهای خودران به متغیرهای محیطی را بهبود بخشیده و خودروها را ایمنتر کند.
استفاده از اتومبیلهای خودران در حمل و نقل
ماشین های خودران، به عنوان فناوری مبتنی بر هوش مصنوعی، به انسانها در حمل و نقل و جابجایی کمک میکنند؛ در نتیجه نیازمند آن هستند که مانند انسان، مهارتهای هدایت وسیله نقلیه را داشته باشند:
- نقشهبرداری و خواندن آن: خودروهای خودران، اطلاعات سیستمهای حسگر خود را با سایر دادهها (مانند نقشههای دیجیتال) برای ایجاد و خواندن نقشه محیط، ترکیب میکنند.
- برنامهریزی مسیر: وسایل نقلیه هوشمند، از سیستمهای حسگر خود برای برنامهریزی مسیر حرکتشان در محیط استفاده میکنند.
- جلوگیری از برخورد با موانع: خودروهای خودران از سیستمهای حسگر خود، به منظور هدایت و حرکت ایمن، استفاده میکنند. به هنگام حرکت، این اتومبیلها میبایست به طور دقیق نشانههای محیطی را شناسایی و تفسیر کرده و نسبت به آنها واکنش نشان دهند تا از برخورد به موانعی مانند عابران پیاده، دوچرخهسواران، ساختمانها و سایر خودروها جلوگیری کنند.



