
ارتباطات بین سنسورها و معماریهای ترکیب آنها را میتوان بر حسب نوع ارتباط بین سنسورها در سیستم، به انواع مختلف تقسیم کرد
ترکیب حسگرها فرآیندی است که در آن ورودیهای دو یا چند سنسور با یکدیگر ترکیب شده تا از این طریق تصویری کاملتر، دقیقتر و با قابلیت اعتماد بالاتر از محیط (بخصوص در محیطهای پویا) ارائه دهد. هدف از ترکیب یا فیوژن حسگرها، ارائه نتایجی دقیق با بکارگیری حداقل تعداد سنسورها، حداقل پیچیدگی سیستم و کمترین هزینه است. در مقالات قبلی ترکیب حسگرها، به توضیح مقدمات این فناوری پرداختیم. در این مقاله، به بررسی سطوح مختلف ترکیب سنسورها پرداخته و به شرح معماریهای مختف مورد استفاده در سیستمهای ترکیب حسگرها خواهیم پرداخت.
در پایینترین سطح، همجوشی یا ترکیب حسگرها به دو دسته کلی ترکیب نوع متمرکز و غیرمتمرکز تقسیم میشود. این دستهبندی بر حسب اطلاعاتی چون نوع دادههای مورداستفاده، دادههای خام بدست آمده از سنسورها، ویژگیهای استخراج شده از دادههای حسگر و اطلاعات کسب شده از دادههای جمعآوری شده، انجام میشود.
مزایای ترکیب سنسورها
در حالت کلی مزایای زیر را میتوان برای ترکیب حسگرها برشمرد؛ هرچند که مزایای این فناوری، بسته به نوع پیادهسازی آن متفاوت خواهد بود:
افزایش کیفیت دادهها
افزایش قابلیت اطمینان دادهها
تخمین مقادیر اندازهگیری نشده
افزایش مناطق تحت پوشش
طبقه بندی ترکیب حسگرها
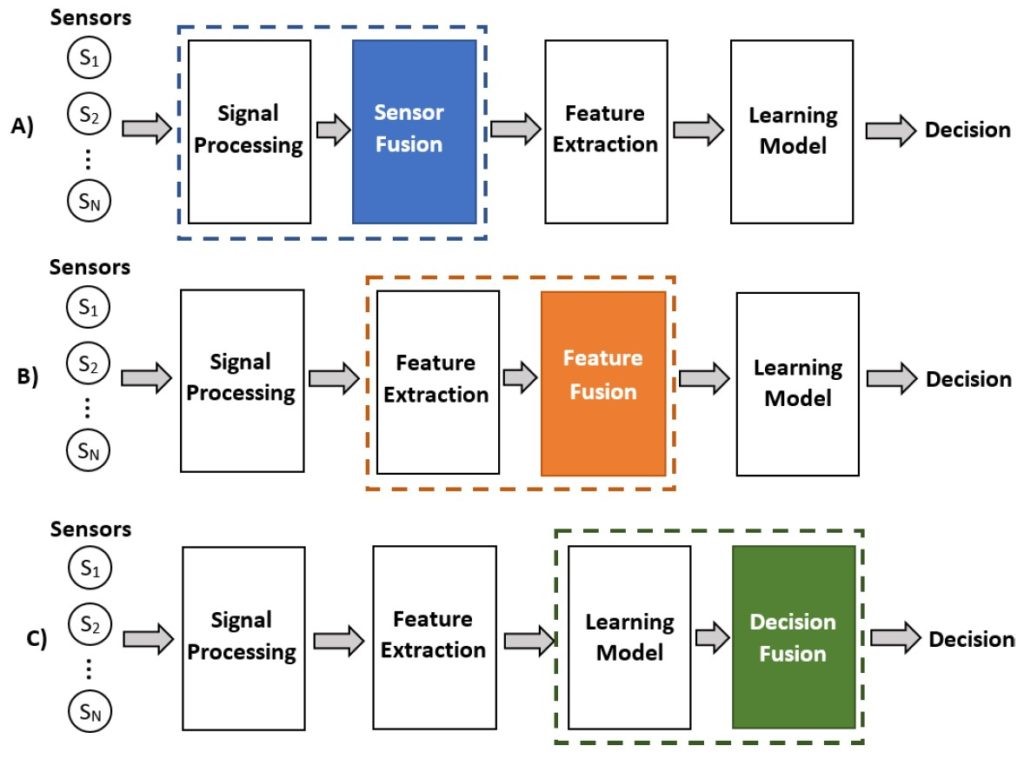
ترکیب حسگرها نوعی از ترکیب دادههاست که از علومی چون آمار، احتمال و متدولوژیهای دانش بنیان ر یا مبتنی بر استدلال/ استنتاج برای رسیدن به هدف استفاده مینماید. از مصادیق تکنیکهای آماری به کار رفته در این حوزه میتوان به تحلیل کوواریانس و واریانس متقاطع اشاره نمود. همینطور فیلترینگ کالمن، برآورد حداکثر درستنمایی و شبکههای بیزی، تکنیکهایی هستند که علم احتمالات در اختیار این فناوری گذاشته است. از نمونههای تکنیکهای مبتنی بر دانش و استدلال/ استنتاج نیز میتوان به شبکههای عصبی مصنوعی، منطق فازی و الگوریتمهای ماشین لرنینگ اشاره نمود. ترکیب حسگرها در حالت معمول دارای سه سطح مجزا است:
انتزاع در سطح سنسور
در این سطح، دادههای حسگر به صورت خام مورد پردازش قرار میگیرند. در صورت استفاده از بیش از یک سنسور برای اندازهگیری کمیتی فیزیکی، دادهها در این سطح ترکیب میشوند. در مورد سنسورهایی که کمیتهای متفاوتی را اندازهگیری میکنند، ترکیب دادهها در سطوح بالاتر انجام میشود.
انتزاع سطح ویژگی
در این سطح، ویژگیها از چندین سنسور مستقل از هم استخراج شده و از آنها به منظور بازنمایی بردار ویژگیهای منفرد مورد استفاده قرار میگیرد.
انتزاع سطح تصمیم
در این سطح، ویژگیهای مختلف طبقهبندی شده و از این دادهها، برای تصمیمگیری در مورد محیط و تشخیص اقدامات موردنیاز استفاده میشود.
پارادایمهای مختلف ترکیب سنسورها/ دادهها (آماری، احتمالی و دانش بنیان) در سطوح مختلف انتزاع اشاره شده قابل بکارگیری هستند. علاوه بر 3 سطح اشاره شده، سطوح هیبریدی نیز قابل مدلسازی هستند. به عنوان مثال، دادههای دو حسگر مختلف را میتوان برای ایجاد یک مجموعه ویژگی با هم ترکیب کرده و از مدل دستهبندی به دست آمده، در سطح 3 (انتزع سطح تصمیم) استفاده نمود. از سوی دیگر، نتایج حاصل از استخراج ویژگیها و مدلهای دستهبندی بدست آمده از چند حسگر، میتوانند به منظور آموزش و اصلاح الگوریتمهای دستهبندی سطح سوم در سایر حسگرها استفاده شوند.
انواع ارتباط بین سنسورها
ارتباطات بین سنسورها و معماریهای همجوشی آنها را میتوان بر حسب نوع ارتباط بین سنسورها در سیستم به انواع زیر تقسیم نمود:
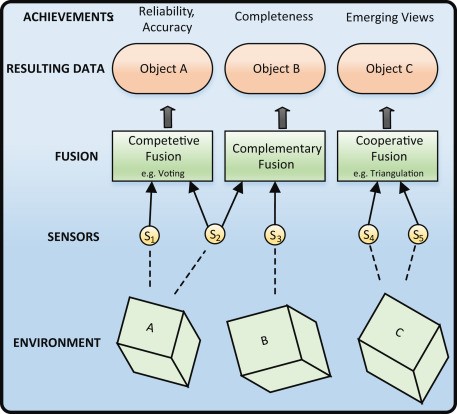
فیوژن مکمل (Complementary sensor fusion):
اطلاعات ارائه شده توسط این سنسورها، توصیفکننده محیط اطراف خود از جنبههای مختلف هستند. ترکیب این اطلاعات میتواند به منظور ایجاد دیدی وسیعتر نسبت به محیط مورد استفاده قرار گیرد. در این نوع از همجوشی، حسگرها به صورت مستقل از هم عمل کرده و به طور مستقیم به یکدیگر وابسته نیستند؛ اما میتوانند برای رسیدن به تصویری کاملتر از پدیده تحت بررسی، با یکدیگر ترکیب شوند. به عنوان مثال، ترکیب اطلاعات بدست آمده از سنسور سرعت سنسور لرزش میتواند اطلاعات بیشتر و بهتری در مورد وضعیت موتور و گیربکس خودرو ارائه دهد. به عنوان مثالی دیگر میتوان به سیستمهای بینایی ماشین (vision systems) اشاره کرد؛ در این سیستمها، تصویر شی مورد بررسی، توسط چندین دوربین، یا ترکیبی از یک دوربین و یک سنسور لیدار گرفته شده و با ترکیب تصاویر گرفته شده از این شی واحد، میتوان به درک بهتری از محیط دست پیدا کرد.
ترکیب سنسور نوع رقابتی (Redundant or Competitive sensor fusion):
در بعضی کاربردها از چندین سنسور به منظور گرفتن اطلاعات از یک هدف خاص استفاده شده و خروجی این سنسورها برای ارائه یک خروجی قابل اطمینان با هم ترکیب میشوند. به طور مثال، اگر میدان دید دو دوربین با هم همپوشانی داشته باشد، ناحیه همپوشانی در نقش یک حسگر رقابتی یا اضافی عمل میکند. تمامی حسگرها در این نوع، یک هدف واحد را اندازهگیری میکنند. همانند دوربینهای ذکر شده که هر دو دارای یک میدان دید یکسان هستند. این نوع حسگرها دارای دو نوع عملکرد هستند: ترکیب دادههای بدست آمده از چند سنسور، و اندازهگیری با استفاده از یک سنسور و ارائه خروجی در زمانهای مختلف. نوعی خاص از همجوشی حسگرها از نوع رقابتی را میتوان به منظور نظارت بر پارامترهای حیاتی به کار برد؛ این کاربرد، همجوشی مقاوم در برابر خطا یا fault-tolerant fusion نامیده میشود. این نوع همجوشی، براساس طرحهای مدولار مانند معماریهای افزونه N+1 پیادهسازی میشوند.
ترکیب سنسور مشارکتی (Cooperative sensor fusion):
این نوع از همجوشی، ورودیهای سنسورهای مختلف مانند سنسورهای صوتی و تصویری را با هم ترکیب کرده و خروجی تولید شده توسط آن نسبت به ورودی تک تک سنسورها به صورت منفرد، پیچیدگی بیشتری خواهد داشت. به طور مثال یکپارچهسازی یا ترکیب دو دوربین با زوایای دید مختلف، میتواند برای تولید تصویری 3 بعدی از محیط مورد بررسی، مورد استفاده قرار گیرد. همجوشی مشارکتی سنسورها نسبتا پیچیده بوده و نتایج بدست آمده از آنها، به دقت تک تک سنسورها بسیار حساس است. هرچند همجوشی رقابتی حسگرها میتواند منجر به افزایش دقت و سطح اطمینان نتایج شود، اما ترکیب مشارکتی سنسورها پتانسیل آن را دارد که مقادیر این دو پارامتر را کاهش دهد.
سطوح ترکیب سنسورها
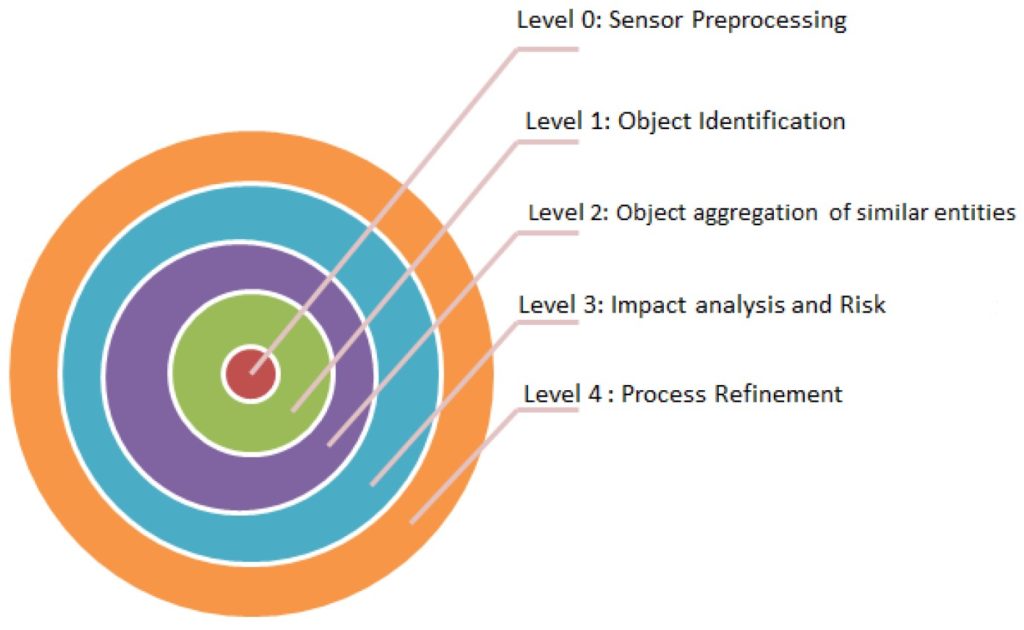
علاوه بر طبقهبندی انجام شده، همجوشی یا ترکیب سنسورها را میتوان به 6 سطح نیز تقسیمبندی کرد. این فناوری برای دههها، بخشی جدانشدنی از سیستم نظامی بوده است. به طور مثال، آزمایشگاههای وزارت دفاع ایالات متحده آمریکا، یکی از مهمترین مدلهای ترکیب دادهها را توسعه داده است. متودولوژی توسعه این مدل، از 5 سطح تشکیل شده است:
سطح صفر- پیش پردازش دادهها، پایینترین سطح در همجوشی سنسورهاست که در آن مواردی چون شکلدهی و ترکیب سیگنالها انجام میشود. در ارتباط با سنسورهای نوری، همجوشی در سطح پیکسلهای منفرد قابل انجام است. هدف از پیش پردازش، کاهش حجم دادهها در عین حفظ اطلاعات مفید برای سطوح بعدی است.
سطح یک- در این سطح پالایش دادهها، با استفاده از دادههای پیش پردازش شده در مرحله قبل انجام شده و عملیات زیر پیادهسازی میشود: تطابق فضایی زمانی (spatiotemporal alignment)، بررسی همبستگی و وابستگی بین دادهها، پیادهسازی تکنیکهای خوشهبندی، حدف موارد مثبت کاذب (false positive) و ترکیب ویژگیهای استخراج شده از تصاویر. پالایش دادهها به طبقهبندی و شناسایی اشیا نیز منجر خواهد شد. دادههای خروجی بدست آمده میتوانند به منظور ارزیابی و بررسی موقعیت استفاده شوند.
سطح دو- ارزیابی موقعیت، روابط بین اشیای دستهبندی شده و شناسایی شده را مشخص میکند. از انواع روابط شناسایی شده میتوان به مجاورتها، مسیرها و فعالیتهای ارتباطی اشاره کرد که شناسایی آنها به تعیین اهمیت اشیا در ارتباط با محیط کمک میکند. از مهمترین وظایف این سطح میتوان به اولویتبندی فعالیتهای مهم، رویدادها و الگوهای کلی اشاره نمود. خروجی این سطح مجموعهای از استنتاجهای سطح بالاست که به ارزیابی تاثیرات کمک خواهد کرد.
سطح سه- ارزیابی تاثیرات بدست آمده از سطح دو، به تحلیل موقعیت کمک میکند. علاوه بر این، در این سطح پیشبینیهایی برای شناسایی آسیبپذیریهای احتمالی، ریسکها و فرصتهای عملیاتی در کوتاه مدت انجام میشود. پیشبینی آینده مواردی چون ارزیابی تهدیدها یا خطرات و پیشبینی نتایج را شامل میشود.
سطح چهار- پالایش فرآیند به منظور بهبود سطوح صفر تا 3، مدیریت حسگرها و سایر منابع انجام میشود. در ابتدا مدیریت منابع به صورت دستی و در حین اولویتبندی وظایف، زمانبندی کارها و کنترل منابع انجام میشد. اما سیستمهای مدرن امروزی، تجزیه و تحلیلهای دستی را با ابزارهای مبتنی بر هوش مصنوعی و یادگیری ماشین ادغام کردهاند.
ساختار ترکیب حسگرها در کاربردهای اینترنت اشیا
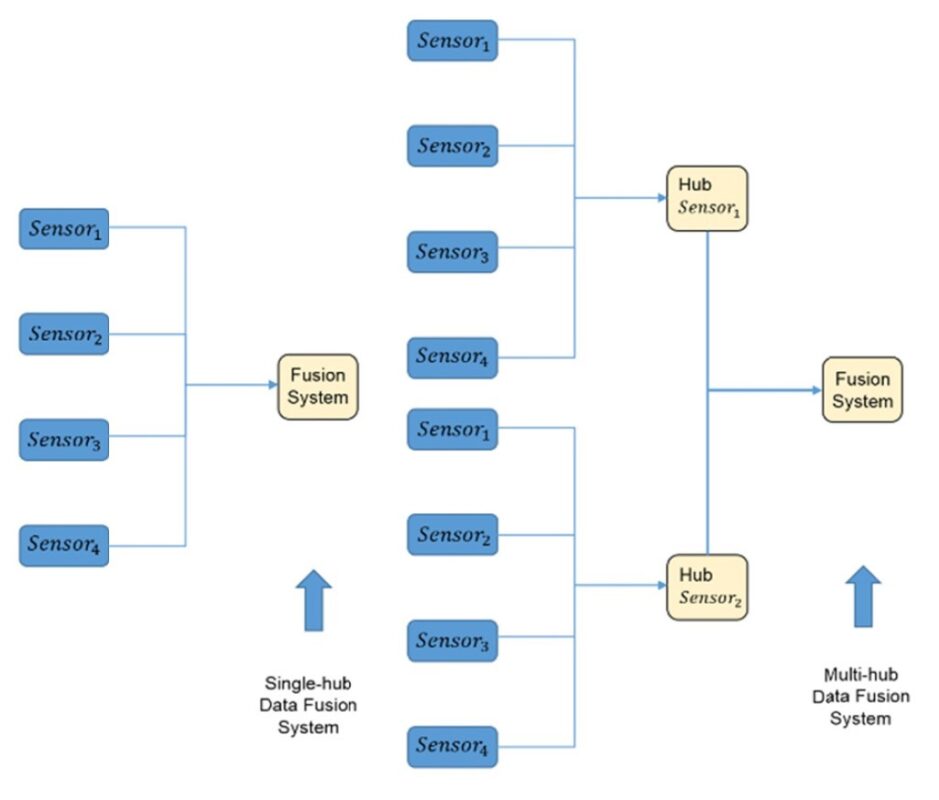
همانطور که پیشتر ذکر شد، ترکیب حسگرها در سطوح مختلف از جمله سطح سنسور، سطح ویژگی و یا سطح تصمیم قابل پیادهسازی است. در حوزه اینترنت اشیا، سنسورها میتوانند بر حسب نوع نشر داده در شبکه حسگر بیسیم، دستهبندی شوند. در معماری تک هاب، هر سنسور، دادهها را مستقیما به هاب فیوژن دادهها منتقل میکند. معماری شبکه ستارهای (star network architecture) نمونهای از معماری تک هاب میباشد. در معماری چند هابی، دادهها مسیر سنسورهای قرار گرفته در کنار هم را برای رسیدن به هاب همجوشی طی میکنند. شبکه مش (Mesh network)، نمونهای از یک ساختار چند هابی است.
معماری چندهاپی مزایای زیادی دارد. از آن جمله میتوان به پشتیبانی این معماری از مقیاسپذیری اشاره کرد؛ زیرا سنسورهای کمکی قرار گرفته در بیرون از شبکه، میتوانند دادهها را بدون اعمال جریمه یا پنالتی، در فواصل طولانی انتقال دهند. بکارگیری فیوژن پیشرونده داده در هر هاب، مصرف انرژی را به حداقل رسانده و آن را در طول شبکه پخش میکند. این معماری، مصرف انرژی را از طریق کاهش انرژی نقل و انتقال، با استفاده از اطلاعات کانال و سایر ورودیها، کاهش میدهد.
خلاصه
ترکیب حسگرها نوعی از ترکیب دادههاست. روشهای مختلفی برای طبقهبندی سطوح ترکیب وجود دارد. از سوی دیگر، تعاملات سنسورها با هم را نیز میتوان به طرق مختلف دستهبندی نمود، مانند انواع ترکیب نوع مکمل، رقابتی و مشارکتی. رویکردهای چندوجهی فیوژن میتوانند نقاط ضعف ناشی از بکارگیری سنسورها به صورت منفرد را رفع کرده و کیفیت و دقت اطلاعات حاصل از بکارگیری آن رویکرد را بهبود ببخشند. شبکههای بی سیم اینترنت اشیا، با استفاده از معماریهای ترکیب حسگرها، فرصتهای منحصربفردی از جهت حداکثرسازی بهرهوری انرژی پیش روی ما قرار میدهند.



