سیستمهای الکترو مکانیکی، ترکیبی از اجزای الکتریکی و مکانیکی در ساختارهای با مقیاس میکرومتر است. اینگونه سیستمها از ترکیب نیمههادیها و تکنولوژیهای میکرومتری در ساخت، تمامی قسمتهای الکترونیکی، مکانیکی و حسگری را به صورت مجتمع بر روی یک سطح ویفر مشترک میسازند. اجزای اصلی در هر سیستم MEMS عبارتند از: المانهای مکانیکی، مکانیسم حسگری و ASIC ها یا میکروکنترلرها. در این مقاله به بررسی شتابسنجها و ژایروسکوپهای مبتنی بر تکنولوژی MEMS خواهیم پرداخت.
MEMS به عنوان سنسورهای اینرسی
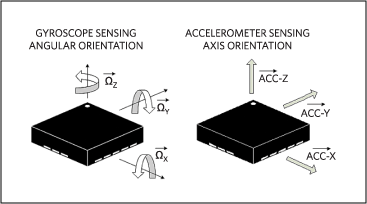
سنسورهای MEMS کاربردهای فراوانی در اندازهگیری شتاب خطی یا حرکت زاویهای دارند (شکل 1). تمامی سنسورهای شتابسنجهای MEMS با استفاده از یک مدار اندازهگیری موقعیت، جابجایی یک جرم را اندازه میگیرند. سپس مقدار اندازهگیری شده توسط ADC به سیگنال دیجیتال تبدیل میشود. اما ژیروسکوپ به خاطر شتاب کوریولیس، جابجایی و دستگاه آن را اندازهگیری میکند.
1. مقایسه حرکت زاویهای و خطی
اصول پایه عملکرد شتاب سنج
طبق قانون دوم نیوتون F=ma یا a=F/m. لازم به ذکر است که شتاب، باعث تولید نیرویی میشود که با ساختار تشخیص نیروی شتاب سنج، گرفته میشود. بنابراین، شتابسنج در واقعیت نیرو را اندازه میگیرد نه شتاب را. اساسا، شتاب سنج؛ شتاب را به صورت غیر مستقیم از طریق نیروی اعمالی به یکی از محورهای شتابسنج بدست میآورد.
در تعریفی دیگر، شتابسنج یک وسیله الکترومکانیکی شامل سوراخها، حفرهها، فنرها و کانالهایی است که توسط تکنولوژی میکروماشینکاری ساخته شدهاند. شتابسنجها در چندین مرحله پردازش ویفر ساخته میشوند و نیروی شتاب را با تشخیص جابجایی یک جرم نسبت به الکترودهای ثابت، اندازه میگیرند.
مکانیسم حسگری سنسور شتاب
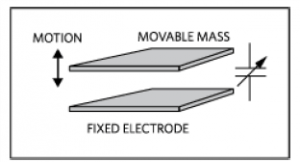
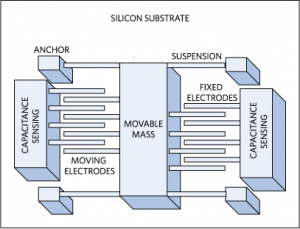
متداولترین روش استفادهشده در شتابسنجها، حسکردن ظرفیت خازنی است؛ به این صورت که جابجایی جرم به خاطر شتاب، سبب تغییر در ظرفیت خازنی مکانیسم حسگری سنسور میشود (شکل 2). علت استفاده از این روش در شتابسنجها، دقت بالا، پایداری، تلفات توان پایین و داشتن ساختاری ساده برای ساخت است. همچنین به نویز و تغییرات دمایی حساس نیست. به دلیل ساختار فیزیکی (فنرها) و هوای محبوس شده در داخل سنسور ( که مانند یک مانع عمل میکند)، پهنای باند شتابسنجهای خازنی محدود به چندصد هرتز است.
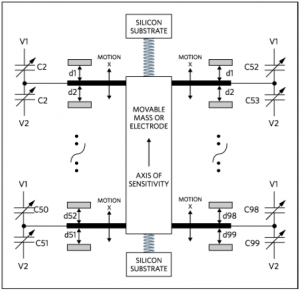
خازن استفاده شده میتواند به صورت تکی یا تفاضلی باشد. شکل 3 که یک آرایش تفاضلی را به کار گرفته است در نظر بگیرید. در این آرایش یک جرم صفحهای متحرک توسط دو فنر بین دو صفحه الکترود ثابت نگهداشته شده است. واضح است که جابجایی جرم نسبت به دو صفحه ثابت است و باعث تغییر در ظرفیت خازنی میشود.با محاسبه اختلاف بین دو خازن، میتوان جابجایی و جهت آن را بدست آورد.
2. جرم متحرک و ظرفیت خازنی
3. شتاب مربوط به چندین جرم متحرک
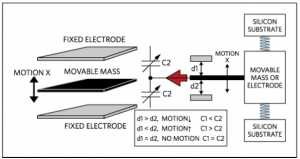
به طور خلاصه، نیرو سبب جابجایی جرم یا به عبارتی سبب تغییر در ظرفیت خازنی میشود. حال با قرار دادن چندین الکترود به صورت موازی، ظرفیت خازنی بزرگتری ایجاد میشود که تشخیص آن راحتتر است (شکل 4). V1 و V2، اتصالات الکتریکی هر طرف خازنها هستند.
4. شتاب مربوط به یک جرم متحرک
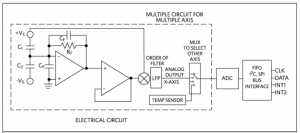
ولتاژ آنالوگ تولید شده، قبل از تبدیل به کد دیجیتال، ابتدا تقویت، دمدولاسیون و فیلتر میشود. سپس رشته کد دیجیتال سریال، از یک بافر FIFO عبور میکند تا دادههای سریال را به رشته دادههای موازی تبدیل میکند. سپس این رشته داده موازی توسط پروتکلهای سریال نظیر I2C یا SPI منتقل میشود (شکل 5).
5. مدار الکترونیکی یک شتابسنج
شتاب سنجهای چند محوره
نگاهی دیگر به شکل 3 بیاندازید و یک شتابسنج واقعی را در نظر بگیرید (شکل 6). حال میتوانیم مدل مکانیکی هر قسمت از شتابسنج را تصور کنیم.
6. مدل مکانیکی یک شتابسنج واقعی
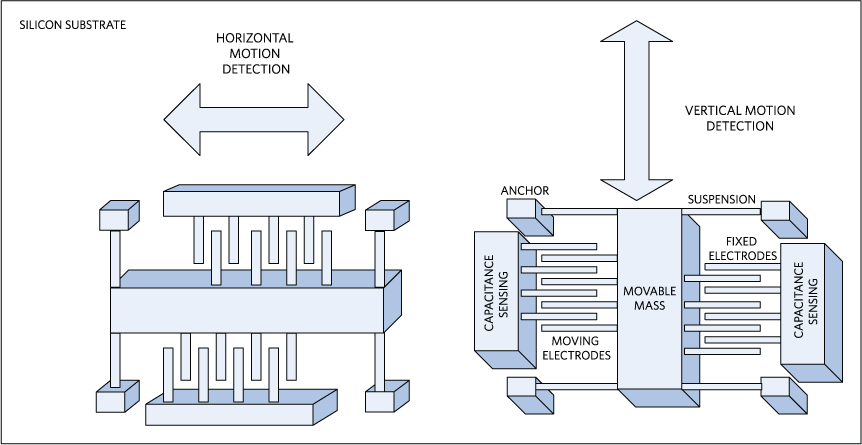
با چرخش 90 درجهای یک شتابسنج و قرار دادن آن در کنار یک شتابسنج دیگر، به راحتی یک شتابسنج دو محوره ساخته میشود (شکل 7).
7. یک شتابسنج دو محوره
دو راه برای ساختن یک شتابسنج دو محوره وجود دارد؛ قرار دادن دو شتابسنج تک محوره عمود بر هم، یا استفاده از یک جرم و سنسور خازنی که جابجایی در دو محور را اندازهگیری میکند.
انتخاب شتاب سنج
هنگامیکه یک شتابسنج انتخاب میکنید، لازم است موارد زیر را در نظر بگیرید:
پهنای باند: پهنای باند یک سنسور نشاندهنده محدوده فرکانسهای لرزشی که شتابسنج قادر به تشخیص آن است، میباشد. حرکات بدن انسان بیتر از 10-12 هرتز نمیشود. بنابراین شتابسنجی با پهنای باند 40-60 هرتز مناسب برای حس کردن حرکات بدن است.
حساسیت: حساسیت نشاندهنده حداقل تغییرات خروجی به ازای تغییرات مکانیکی ورودی است.
چگالی نویز ولتاژ: نویز ولتاژی با جذر پهنای باند رابطه عکس دارد. هر چهقدر سریعتر تغییرات شتابسنج را بخوانیم، صحت دادهها کمتر میشود. اثر نویز وقتی بیشتر است که با شتابهای کوچک سرو کار داریم.
ولتاژ صفر شتاب گرانش: نشان دهنده مقداری است که در شتاب 0g انتظار میرود در خروجی دیده شود.
پاسخ فرکانسی: محدوده فرکانسی با یک تلورانس (مثلا 5± درصد) است برای اینکه سنسور حرکت را تشخیص داده و مقدار صحیحی گزارش دهد. با استفاده از پاسخ فرکانسی میتوان حداکثر میزان اختلاف بین حساسیت اندازهگیری شده با حساسیت مرجع در هر فرکانسی را بدست آورد.
محدوده دینامیکی: نشاندهنده محدوده بین کوچکترین تا بزرگترین اندازه شتابی است که شتابسنج میتواند قبل از اینکه خروجی قطع یا خراب شود، اندازه بگیرد.
شتابسنج در مقایسه با ژایروسکوپ
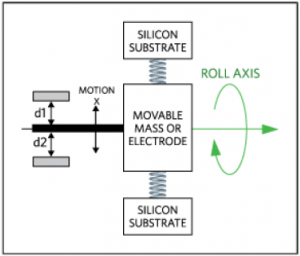
شتابسنجها شتاب خطی را در طول یک یا چند محور و ژیروسکوپها سرعت زاویهای را اندازه میگیرند. اگر یک شتابسنج را بچرخانیم، فاصله بین صفحات تغییری نخواهد کرد و در نتیجه ظرفیت خازنی تغییر نخواهد کرد. پس خروجی سنسور به حرکت چرخشی حساسیتی نشان نخواهد داد (شکل 8).
8. عدم حساسیت شتابسنج به حرکت چرخشی
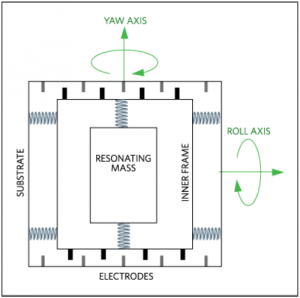
میتوان سنسور را به این شکل ساخت که قاب داخلی، جرم رزونانس را در بر گیرد و به سطح ویفر توسط فنر و با اختلاف 90 درجهای نسبت به حرکت چرخشی، متصل شود(شکل9). با این ساختار میتوان شتاب کوریولیس را با حس کردن تغییرات خازنی بدست آورد.
9. نمایش ساختار داخلی یک ژایروسکوپ
کاربردهای شتاب سنج و ژیروسکوپ
مدت زیادی است که از شتابسنجها در خودرو برای تشخیص به موقع تصادف و عملکردن کیسههای هوا، استفاده میشود. همچنین در گوشهای هوشمند نیز بهکار میرود (مثلا در تشخیص چرخش صفحه گوشی).
منبع:
Dadafshar Majid (March 25, 2014 ), Accelerometer and Gyroscopes Sensors:Operation, Sensing, and Applications.