استفاده از چرخ برای حرکت ربات، بهترین گزینه میباشد چرا که طراحی و پیادهسازی چرخ بر روی ربات بسیار ساده است و ربات با استفاده از چرخ به راحتی میتواند به حداکثر سرعتی که برایش در نظر گرفته شده دست یابد. در ضمن چرخها ثبات ربات را چه در حالت استاتیک و چه در حالت دینامیک تأمین میکنند، چرا که مرکز ثقل رباتهای چرخدار در حرکت یا در حالت ایستا هرگز تغییر نمیکند و نیاز به پیادهسازی مدلهای محاسباتی پیچیده ندارد. اما نقطه ضعف رباتهای چرخ دار در زمینهای ناهموار به چشم میآید، در این سطوح رباتهای چرخ دار نمیتوانند به خوبی تعادل خود را حفظ کنند. همچنین در زمینهای فوقالعاده صیقلی احتمال سر خوردن یا کشیده شدن ربات روی زمین وجود دارد. چرخ های ربات متنوعی برای ساخت ربات وجود دارد. سینماتیک رباتهای متحرک تا حد زیادی بستگی به نوع چرخها دارد. چرخهای استاندارد ثابت یا چرخهای کاستر از پرکاربردترین چرخها برای ربات هستند اما اگر به کنترل و حرکت دقیقتر نیاز باشد استفاده از چرخهای همه جهته ضروری خواهد بود.
انواع چرخ های ربات
انواع چرخهای ربات
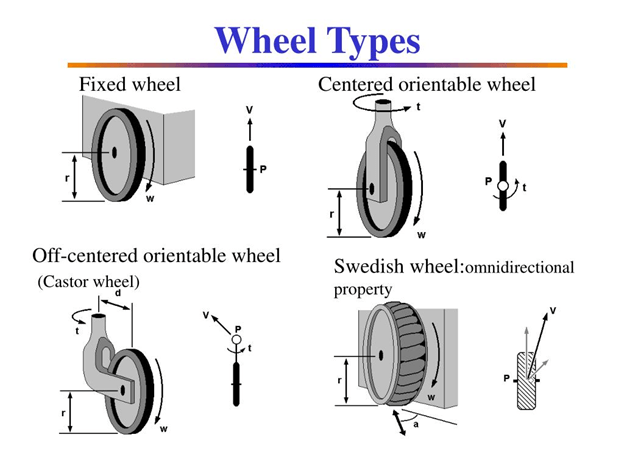
1- چرخهای استاندارد یا ثابت (Standard / Fixed Wheel)
چرخهای ثابت دو درجه آزادی دارند به این معنا که تنها در دو جهت ( عقب یا جلو ) قادر به حرکت هستند از این نوع چرخها غالباً به عنوان چرخهای پیشران در بخش عقب رباتهای ۴ چرخ استفاده میشود.
البته از چرخهای ثابت میتوان برای کنترل جهت ربات نیز بهره برد اما در این حالت برای هر چرخ به موتورهای مجزا نیاز است. به هر حال اگر این نوع چرخها را روی ریلهای مخصوص قرار دهیم، میتوانیم بدون استفاده از موتورهای مجزا از آنها برای کنترل جهت ربات استفاده کنیم.
چرخ استاندارد
2- چرخ هایی که قابلیت تغییر جهت دارند
این چرخها به توسط سازهای چنگال مانند به بدنه ربات متصل خواهد شد، و معمولاً از آنها برای حفظ تعادل ربات و به عنوان چرخ هرزگرد استفاده میشود (استفاده از آنها به عنوان چرخ پیشران بسیار نادر است) این نوع چرخ های ربات به دو دسته تقسیم میشوند:
1-2 چرخ های دارای شاخک مرکزی (Centered Orientable)
این نوع چرخها دارای شاخکهایی عمودی هستند که مستقیماً به چرخ متصل شده است (مدار مرکزی). طراحی این چرخ بسیار ساده است، به همین دلیل در ساخت ربات بسیار پر کاربرد میباشد در عین حال حرکات قابل پیشبینی و حفظ تعادل در حالت ایستا را نیز برای ربات به ارمغان می آورد.
چرخ دارای مدار مرکزی
2-2 چرخهای دارای شاخک خارج از مرکز (Off-Centered Orientable)
این نوع چرخها کمی با چرخهای دارای شاخک مرکزی تفاوت دارند، اولین تفاوت این است که شاخک این چرخها مورب (با زاویه از محور عمود بر چرخ) است و از مرکز چرخ عبور نکرده در برخی طراحیهای این چرخها یک محور دوار بین پایه چرخ و شاخک وجود دارد که میتواند ۳۶۰ رجه چرخش داشته باشد البته این قابلیت نامتعادل شدن و لغزش ربات را در برخی شرایط ( هنگامی که چرخ تماسش با زمین را از دست میدهد، در هوا بیاختیار میچرخد) به همراه میآورد اما در حالت عادی (هنگامی که چرخ روی زمین قرار دارد) ربات میتواند به سهولت به هر جهتی بچرخد. کاستر زاویه محوری است که از طریق فرمان به چرخها متصل خواهد شد، بنابراین این چرخها با نام چرخ کاستر نیز شناخته میشوند.
چرخ درای شاخک خارج از مرکز
3- چرخهای توپی (Ball wheel)
چرخهای توپی از سادهترین انواع چرخ هستند که در رباتیک به کار برده میشوند.
گوی این چرخها غالباً از فلز یا پلاستیک فشرده ساخته شده و درون یک محفظه قرار گرفته این گوی ۳۶۰ درجه آزادی عمل دارد و معمولاً از آن تنها برای حفظ تعادل ربات استفاده میشود. یکی از بزرگترین نقاط ضعف چرخهای توپی این است که اگر محفظه به درستی طراحی نشده باشد حرکت گوی در آن با سختی و اصطکاک فوقالعاده زیاد همراه خواهد بود علاوه براین، چرخهای توپی در زمینهای ناهموار ناکارآمد هستند و به راحتی در سطوح نرم (سطوح شنی و خاکی ) فرو میروند.
چرخ توپی
4- چرخهای مکانوم و چرخهای همه جهته (Omni wheels and Mecanum Wheel)
در رباتهای مسابقه و رباتهایی که برای انجام وظایف خاصی طراحی میشوند قابلیت حرکت در تمام جهات الزامی خواهد بود. حرکت چند جهته ( Omnidirectional Movement) به این معناست که سازه قادر باشد با چرخیدن روی یک صفحه ثابت جهت حرکتش را به صورت دلخواه تغییر دهد برای نیل به این منظور چرخهای مکانوم و همه جهته برای رباتها طراحی شده است.
چرخ همه جهته
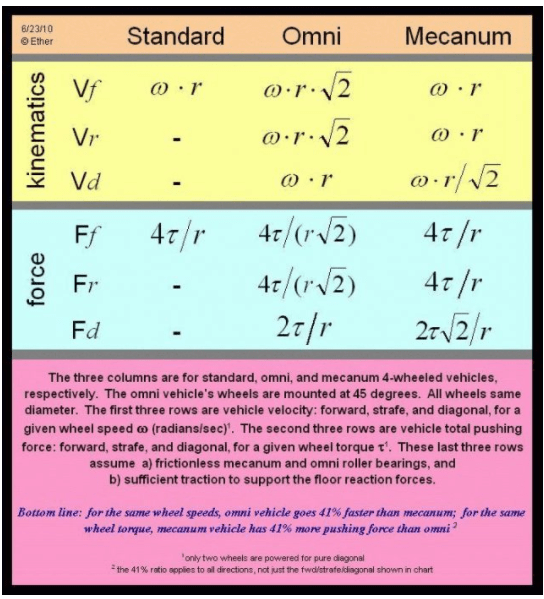
چرخهای همه جهته از چندین چرخ کوچک تشکیل شده که حول یک حلقه چیده شدهاند. چرخهای همه جهته میتوانند بسیار نرم و روان به هر جهتی بچرخند و چرخهای کوچک که شبیه غلطک میمانند به صورت عمودی نسبت به محور اصلی قرار گرفتهاند، که باعث میشوند چرخ موازی با محور خودش بچرخد. چرخهای همه جهته به چرخهای سوئدی نیز معروف میباشند و به عنوان چرخهای پیشران و کنترل کننده کاربرد دارند. چرخهای مکانوم نیز نوعی از چرخهای همه جهته هستند با این تفاوت که چرخهای کوچک غلطکی با زاویه ۴۵ درجه روی چرخ بزرگتر نصب شدهاند. در تئوری، زاویه چرخهای کوچک نسبت به چرخ اصلی چندان مهم نیست و میتوان چرخهای همه جهته با زوایای متفاوتی را ایجاد کرد، اما زوایه ۴۵ و ۹۰ درجه پر کاربرد ترین زوایا هستند.
چرخ مکانیوم
چرخهای همه جهته و مکانوم، به لحاظ ساختاری خواص مکانیکی و سینماتیک با یکدیگر تفاوت دارند و این تفاوت تماماً ناشی از اختلاف زوایه بین شفت چرخهای کوچک و محور اصلی در این دو نوع چرخ میباشد. تفاوتهای سینماتیکی و خواص مکانیکی این دو نوع چرخ در جدول زیر نشان داده شده:
در سالهای اخیر استفاده از چرخهای مکانیوم بهخصوص در زمینه طراحی ربات و در مسابقات رباتیک بهخصوص در مسابقات Robocon و FRC افزایش یافته چرا که چرخهای مکانیوم به راحتی میتوانند روی محورهای موازی سوار شوند. اگر شما قصد دارید از چرخهای همه جهته برای عملکردی مشابه استفاده کنید، زاویه بین محورهای اصلی باید ۶۰ ، ۹۰ و ۱۲۰ درجه باشد که رعایت این اصل ساخت و طراحی ربات را کمی مشکل میکند بنابراین اکثر سازندگان ربات استفاده از چرخ های مکانیوم را به استفاده از چرخ سوئدی (همه جهته) ترجیح میدهند.
5- ریلهای ربات (Robot Tracks)
برای ساخت ربات به جای چرخ میتوان از ریل نیز استفاده نمود. گاهی اوقات رباتها برای عبور و مرور روی سطوح ناهموار طراحی میشوند و در این شرایط استفاده از چرخ گزینه چندان مناسبی نیست، همچنین در زمینهای فوقالعاده صیقلی و لیز چرخها عملکرد خوبی نخواهند داشت اما ریل میتواند به راحتی در زمینهای لیز، نرم و ناهموار حرکت کند چرا که وزن ربات را به صورت یکسان در تمام قسمتها پخش میکند.
جالب است بدانید رباتهایی که از ریل بهره میبرند حتی قادر هستند به راحتی از شیب های فوقالعاده شدید یا پله بالا بروند ( البته برای بالا رفتن از پله نیاز به ریل های مخصوص و طراحی جداگانهای میباشد)
جمع بندی
بهترین چرخ برای ربات شما، وابسته به نوع طراحی و کاربرد ربات خواهد بود. چرخ های ربات ثابت به راحتی به موتور متصل میشوند و میتوان از آنها به عنوان چرخ پیشران یا کنترل کننده بهره برد. اما چرخهایی که قابلیت تغییر جهت دارند یا به صورت کروی هستند، برای حفظ تعادل ربات به کار برده میشوند (بهخصوص هنگامی که دو چرخ پیشران در اختیار دارید و تنها به یک چرخ برای حفظ تعادل نیاز است که به آن چرخ کمکی (Auxiliary Wheel) گفته میشود). چرخ های ربات سوئدی برای کنترل و پیش بردن ربات کاملاً مناسب هستند اما نقاط ضعف منحصر به فرد خودش را دارد اول اینکه این نوع چرخها گران قیمت تر از مدل ثابت هستند و کارایی آنها به دلیل اینکه تمام چرخهای کوچک در جهت حرکت ربات نمی چرخند پایین است، دوماً این چرخها مناسب چرخش درجا نیستند و در صورت چرخش درجا امکان لیز خوردن ربات وجود دارد.
یک ربات برای حفظ تعادل نیاز دارد که اتصال مناسبی با زمین داشته باشد و این اتصال مناسب تا حد زیادی وابسته به نوع چرخ و زمینی که ربات میخواهد روی آن حرکت کند، می باشد. به عنوان مثال اگر قرار است ربات روی پارکت یا سرامیک حرکت کند چرخهای پلاستیکی بهترین عملکرد را خواهند داشت از آن جایی که پارکت و سرامیک فوقالعاده صاف هستند چرخ پلاستیکی به ربات کمک میکند که روی این سطوح لیز نخورد اما اگر ربات بخواهد روی زمینهای گلی یا ماسه ای حرکت کند باید از چرخ های عاج دار استفاده شود تا ربات قادر باشد به راحتی گل و لای و ماسه را کنار بزند و به حرکت خود ادامه دهد، اما استفاده از چرخهای عاج دار روی زمین صاف تنها ناحیه تماس چرخ با زمین را کاهش میدهد و ربات را نامتعادل تر میکند در ضمن استفاده از چرخ صاف روی زمین ماسه ای و گلی باعث میشود چرخ بدون اینکه قادر باشد گل و ماسه را کنار بزند در جای خود بیهوده بچرخد.