
یک محرک نوعی وسیله الکترومکانیکی است که انرژی را به کار مکانیکی تبدیل میکند. در مورد رباتها، عملکرد این محرکها مانند ماهیچههایی هستند که کارها را انجام میدهند. این کار میتواند برای القای حرکت به جسم باشد؛ برای مثال بالا بردن یک جسم توسط گریپر یا بازو. انواع مختلفی از محرکهای در دسترس وجود دارد و اغلب آنها قادر هستند حرکت چرخشی یا خطی ایجاد کنند. حرکت نوسانی به ندرت استفاده میشود و حتی در صورت نیاز میتواند با استفاده از محرک خطی و یا چرخشی تولید شود.
محرکهای خطی
همان طور که از نامشان مشخص است محرکهای خطی، حرکت خطی ایجاد میکنند؛ یعنی حرکتهایی به این طرف و آن طرف ایجاد میکنند. این محرکها دارای توانایی تبدیل حرکت چرخشی به حرکت خطی نیز هستند. برای سادگی یک دوچرخه را در نظر بگیرید؛ زمانی که یک دوچرخه سوار پدال را فشار میدهد، براکت پایینی را در یک چرخهای که متصل به یک زنجیر غلتکی میباشد میچرخاند. حرکت چرخشی در براکت، یک حرکت خطی در زنجیرهی غلتکی را تولید میکند.
محرک چرخشی
محرک چرخشی، چرخش یا حرکت چرخشی را القا میکند. یک موتور DC ساده، نمونهای از یک محرک چرخشی است. همانند محرک خطی، محرکهای چرخشی رامیتوان با استفاده از حرکت خطی یا چرخشی هدایت کرد.
اجازه دهید با مثال دوچرخه ادامه بدهیم تا متوجه شویم چطور حرکت خطی میتواند برای تولید حرکت چرخشی مورد استفاده قرار بگیرد. زنجیرهی غلتکی در یک دوچرخه به چرخدندهی چرخ در حال حرکت که معمولاً چرخه عقبی میباشد متصل است. زمانی که دوچرخهسوار پدال میزند، زنجیر چرخشی (به یاد داشته باشید که زنجیر چرخشی مثالی از حرکت خطی است) چرخدندهی عقبی را میچرخاند و با ایجاد یک دسته حرکت چرخشی زنجیرهای باعث چرخاندن بیشتر چرخ میشود.
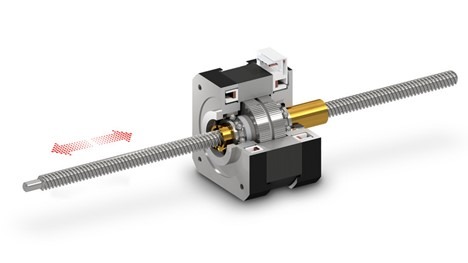
اغلب محرکها میتوانند به صورت مکانیکی طراحی شوند تا حرکت خطی یا چرخشی را القا کنند. یک مهرهی ساده متصل به یک عضو خطی میتواند یک حرکت چرخشی ایجاد بکند. از سوی دیگر، اتصال یک پیچ به یک محرک چرخشی میتواند یک حرکت خطی تولید کند.
انیمیشن های زیر دو حرکت چرخشی و خطی را نشان میدهند. براکت پایینی چرخیده و یک حرکت خطی را در زنجیر غلتکی ایجاد میکند؛ به علاوه همان حرکت خطی زنجیر، حرکت چرخشی در چرخدنده ایجاد میکند.
محرکها برای ایجاد حرکت نیاز به انرژی دارند، این منبع انرژی معمولاً جریان الکتریکی، فشار پنوماتیک یا سیال هیدرولیک است. در قسمت بعد محرکهای مختلف در دسترس برای رباتها و منابع انرژی آنها را بررسی خواهیم کرد.
انواع محرکهای رباتها
همانطور که در بخش قبل اشاره شد، یک محرک وسیلهای الکترومکانیکی است که انرژی را به کار مکانیکی تبدیل میکند. انواع مختلفی از محرکها در رباتها استفاده میشوند. در این قسمت محرکهای مختلف در دسترس را بر اساس نوع منبع انرژی مورد استفادهشان طبقه بندی خواهیم کرد.
محرک پنوماتیک
این محرکها از قانون پنوماتیک (هوا یا گاز فشرده شده)، بهمنظور ایجاد حرکت یا انجام کار استفاده میکنند. محرکهای پنوماتیک میتوانند برای تولید هر دو حرکت خطی و چرخشی به کار روند. طراحی پایه شامل یک سیلندر، یک پیستون و تعداد کمی اجزای پشتیبانی کننده مانند سوپاپها، فنرها، درپوشها و غیره است. هوای فشرده یا گاز تحت فشار قرار گرفته داخل سیلندر پر میشود و هوای فشرده سعی میکند با منبسط شدن به فشار اتمسفریک برسد. این انبساط به سمت پیستون یا هر وسیلهی مکانیکی دیگری که باعث حرکت جسم متصل به آن میشود، فشار وارد میکند.
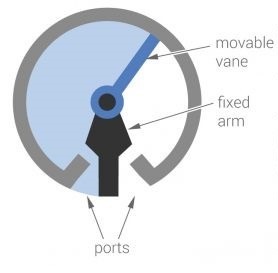
محرکهای پنوماتیکی بسته به طراحی، میتوانند حرکت خطی یا چرخشی ایجاد کند. اغلب فشرده سازهای هوا و پمپهای هوا به دلیل سادگی از این اصل استفاده میکنند. شکل، یک سیلندر تک عملیاتی را نشان میدهد که در آن یک فنر پیستون را به عقب و موقعیت اولیه آن فشار میدهد. در یک سیلندر دو کاربرده، سوپاپ دیگری در انتهای دیگر سیلندر، پیستون را به عقب و حالت پایه خود فشار میدهد.
محرکهای پنوماتیک اغلب در سیستمهایی مورد استفاده قرار میگیرند که پاسخ صحیح و سریع نیاز دارند. این محرکها تمیز بوده (درصد خطای پایین)، نویز کمی ایجاد میکنند و در طراحیهایشان نسبتاً فشرده و کوچک هستند.
ماهیچه هوا پنوماتیکی
به منظور شبیهسازی ماهیچهها در رباتها، ماهیچههای هوایی (که همچنین به عنوان ماهیچههای هوایی پنوماتیک نیز شناخته می شوند) مورد استفاده قرار میگیرد. آنها عموما شامل یک کیسهی لاستیکی پوشیده شده بهوسیلهی یک شبکهی بافتهشدهی الیافی هستند. زمانی که این محفظه با هوا یا گاز تحت فشار پر میشود، به سرعت منبسط شده و پس از تخلیه، منقبض میشود. ماهیچههای هوایی ارزان قیمت و سبک هستند، نسبت قدرت به وزن خوبی را از خود نشان میدهند، ساخت راحتی دارند، در مقایسه با دیگر محرکهای هیدرولیک و الکتریکی انعطاف پذیر هستند، دوام بالایی دارند، ایمن هستند و همچنین استفاده از آنها در زیر آب راحت میباشد.
محرک هیدرولیک
با توجه به اصل پاسکال، در حالت تعادل یک سیال تراکم ناپذیر که در محیط بسته قرار دارد فشار وارد بر خود را بدون کاهش به تمام دیگر نقاط سیال انتقال میدهد. محرکهای هیدرولیک بر اساس این قانون پاسکال طراحی میشود.
به منظور درک بیشتر نحوه عملکرد محرکهای هیدرولیک، اجازه بدهید مثالی بزنیم؛ دو سیلندر متصل به هم که در شکل نشان داده شده است را درنظر بگیرید؛ یکی از سیلندرها سطح مقطعی برابر یک سانتیمترمربع و سیلندر دوم سطح مقطعی معادل ده سانتیمتر مربع دارد. اگر این سیلندرها با سیال غیر قابل تراکم پر شوند و یک واحد فشار به سیلندر سمت چپ (مایع) وارد شود و پمپ را ۱۰ سانتیمتر فشار دهد در این صورت نیروی حاصل شده روی سیلندر سمت راست اثر کرده پیستون را یک سانتیمتر با نیروی ۱۰ واحدی فشار میده ؛ این بدان معنی است که یک واحد نیرو در یک سمت میتواند ۱۰ واحد نیرو در سمت دیگر ایجاد کند.
محرکهای هیدرولیک به طور گسترده در سیستمهایی که به نیروهای بزرگ نیاز دارند مورد استفاده قرار میگیرند، اما در مورد موقعیت یابی و دقت زیاد محدودکننده نیستند.
سیلندر هیدرولیک
عموماً به عنوان موتور هیدرولیک خطی قلمداد میشود و زمانی استفاده میشود که یک ربات به نیروی خطی نیاز داشته باشد. این محرکها به وسیلهی سیالهای هیدرولیک تغذیه میشوند. زمانی که فشار هیدرولیک بر آن اثر میکند، یک پیستون متصل به میلهی پیستون در داخل سیلندر به سمت جلو و عقب حرکت میکند و حرکت خطی ایجاد میکند. سیلندرهای هیدرولیک همچنین میتوانند فشار هیدرولیک رابه حرکت چرخشی تبدیل کنند و بدین ترتیب بر اساس طراحی مکانیکی آنها یک محرک چرخشی تولید کند.
محرکهای پیزوالکتریک
یکی از ویژگیهای غیرمعمولی که برخی سرامیکها و پلیمرها از خود نشان میدهند، پدیدهٔ پیزوالکتریک یا اثر فشاربرقی است. با اعمال نیروی خارجی، دوقطبیهای این سرامیکها تحریک میشوند و میدان الکتریکی ایجاد میشود. وارونه کردن اثر نیرو (مثلاً از کششی به فشاری) جهت میدان را معکوس میکند. از مواد پیزوالکتریک در محرکها و وسایلی که انرژی الکتریکی را به انرژی مکانیکی تبدیل میکنند یا برعکس استفاده میشود.
زمانی که ولتاژ الکتریکی به یک ماده پیزوالکتریک اعمال میشود، شکل فیزیکی آن متناسب با میدان الکتریکی اعمال شده به آن تغییر میکند. این اثر به عنوان اثر پیزوالکتریک غیرمستقیم شناخته میشود. این تغییر شکل دقیق میتواند برای جابجا کردن اجسام با دقت بسیار بالا تقریباً با دقت میکرومتر استفاده شود.
محرکهای پیزوالکتریک در بلندگوها، موتورهای پیزوالکتریک، سنسورهای شتابدهنده، سنسورهای لرزاننده و غیره استفاده میشوند. همچنین میتوانند حرکت خطی یا چرخشی تولید کنند. ضربات این محرکات در صورت نیاز میتوانند تقویت شوند؛ چرا که ضربات (تغییر شکل) مستقیم از این محرکهای پیزوالکتریک عموما کمتر از ۱۰۰ میکرومتر است.
محرکهای پیزوالکتریک فراصوتی
مشابه محرکهای پیزوالکتریک که در بالا بحث شد، محرکهای پیزوالکتریک فراصوتی با استفاده از اصل اثر پیزوالکتریک عمل میکند. یک موج در حال حرکت، صفحهی استاتور (موادی که اثر پیزوالکتریک را از خود نشان میدهند) را تحریک میکند که مشابه یک رینگ الاستیک عمل میکند و حرکت بیضوی در سطح مشترک روتور یا قسمت چرخان، تولید میکند که باعث به حرکت درآوردن روتور و محور محرک متصل شده به آن میگردد.
محرک پیزوالکتریک فراصوتی میتواند حرکت خطی یا چرخشی را القا کند. این محرکها، حرکت بسیار دقیق با نسبت گشتاور به سایز مناسبی فراهم میکند و در اغلب لنزهای فوکوس خودکار دوربین و موتورهای ساعت مورد استفاده قرار میگیرند.
در قسمت بعدی در مورد آلیاژ حافظهی شکل، موتور احتراقی و محرکهای الکتریکی صحبت خواهیم کرد.
آلیاژ حافظه دار
به آلیاژهایی که در طی یک چرخه تنشی یا چرخه حرارتی به شکل اولیه تعریف شده خود، باز می گردند، آلیاژهای حافظه دار (shape memory alloys) یا SMA می گویند. آلیاژهای حافظه دار دارای توانایی تغییر ساختار کریستالوگرافی خود در پاسخ به یک محرک، در قالب تنش یا حرارت هستند. این تغییر در ساختار به این معنی است که مادهای که دارای یک شکل خاص در دما و سطح تنشی معین است، با تغییر دما و سطح تنش، شکل متناظر با آن تغییرات را خواهد داشت.
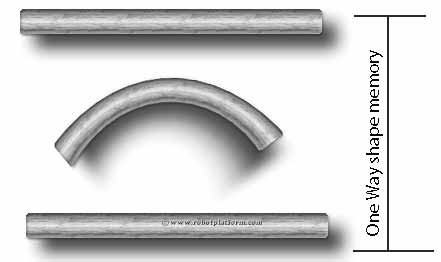
اساساً این آلیاژها میتوانند در دمای سرد و گرم تغییر شکل بدهند و به شکل قبلی خودشان بازگردند SMA ها میتوانند اثر حافظهی یکطرفه یا دوطرفه را از خود نشان دهند.
در اثر یکطرفه، SMA در دمای سرد خم شده و تغییر شکل میدهد و تا زمانی که گرم شود شکل خود را حفظ میکند؛ وقتی گرم شد به حالت اولیهی خود باز می گردد حال کاهش دوباره دما اثری روی شکل آن نخواهد داشت.
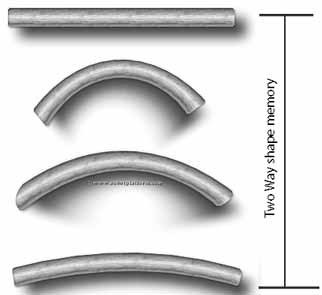
در اثر حافظهی دو طرفه، آلیاژ دو شکل را به یاد می آورد. این بدین معنی است که وقتی آلیاژ سرد میشود به یک شکل و وقتی گرم میشود به شکل دیگری در می آید. این ویژگی جالب SMA، عملکرد ماهیچهها را شبیهسازی میکند و قابل پیاده سازی در رباتها میباشد.
سیم ماهیچه (Muscle wire)
که همچنین به عنوان نیتینول نامیده میشوند نوعی ازSMA (آلیاژ حافظه دار) میباشد. زمانی که این سیمها به صورت الکتریکی تغذیه میشوند طول آنها کاهش پیدا میکند. سیم ماهیچه یک انتخاب ایدهآل برای رباتهای کوچک و ساده برای راه رفتن میباشد چرا که سایز کوچک، وزن کم، طول عمر بالا و کنترل دقیق دارند. با این وجود برای رباتهای سنگین و پیشرفته استفاده از آنها چالش برانگیز خواهد بود. این سیمها که Muscle Wire نیز نامیده میشوند، توانایی انقباض در صورت تقاضا را دارند و میتوانند هزار برابر وزن خود را بلند کنند.
سیمهای NiTinol در دو دسته مختلف وجود دارند: آلیاژ حافظه دار و سوپر الاستیک، که هر دو برای کاربردهای رباتیک ایدهآل هستند.
آلیاژ حافظه دار اجازه می دهد تا سیم حتی پس از اعوجاج به شکل خاصی برگردد.
سوپر الاستیک بسیار انعطاف پذیر است و در برابر پیچ خوردگی مقاوم است. هر دو نوع سیم جایگزین بسیار خوبی برای موتور و شیر برقی هستند، زیرا اندازه و وزن آنها کوچک است، به توان کم نیاز دارند، کنترل دقیقی دارند، می توانند توسط AC یا DC فعال شوند، عمر طولانی دارند و حرکت خطی مستقیم را انجام می دهند.
این ویژگیها سیمهای NiTinol را برای روباتهای پیادهروی کوچکتر و پیچیدهتر عالی میکند.
موتور احتراقی
برای رباتهای بزرگ و رباتهای پرنده، عموماً موتورهای احتراقی به دلیل توان خروجی زیاد آنها ترجیح داده میشوند. موتورهای احتراقی معمولاً با بنزین (سوخت های فسیلی) تغذیه میشوند، که در آن هوا و بنزین (به عنوان اکسید کننده) با فشار و به صورت متراکم به سیلندر تغذیه فرستاده میشود. در نقطهی بهینه، یک شمع جرقه الکتریکی ایجاد میکند که میتواند مخلوط را مشتعل کرده و منجر به ایجاد گرما و گازهای فشرده شود. این واکنش پیستون را که میتواند به صورت مکانیکی به اجزای دیگر متصل شده باشد را به عقب فشار میدهد و حرکت چرخشی یا خطی ایجاد میکند.
موتورهای احتراقی میتوانند سوخت را به صورت داخلی یا خارجی سوزانده که در این صورت به ترتیب به عنوان موتور احتراقی داخلی و موتور احتراقی خارجی نامیده میشوند. برای رباتهای سرگرمی فقط موتورهای احتراقی داخلی ترجیح داده می شوند.
محرکهای الکتریکی
همانطور که از نام آنها پیداست، این محرکها از جریان الکتریکی برای تولید حرکت استفاده میکنند. رایجترین روش طراحی آنها با استفاده از سیمپیچ است. زمانی که جریان از یک سیم پیچ عبور میکند، یک میدان مغناطیسی حول قطبهای آن تولید میکند. نیروهای جاذبه موجود بین اجسام مبتنی بر آهن و اجسام مغناطیسی شده حرکت را القا میکنند.
مشابه دیگر محرکها که تا اینجا دیدیم محرکههای الکتریکی میتوانند حرکت خطی یا چرخشی تولید کنند؛ برای مثال سلونوئیدها حرکت خطی و موتورهای الکتریکی حرکت چرخشی ایجاد میکند.
سلنوئیدها
به زبان ساده، سلنوئید از یک سیمپیچ و یک هستهی آهنی قابل حرکت تشکیل شده است که میتواند انرژی الکتریکی را به انرژی مکانیکی تبدیل کرده و حرکت خطی ایجاد نماید. زمانی که الکتریسیته در یک سیمپیچ جریان مییابد، یک میدان مغناطیسی ایجاد کرده و پیستون آهنی (آهنی یا استیل) را به سمت آن فشار میدهد. سیمپیچها یا فنرهای متعدد را میتوان برای حرکت پیستون به عقب و بازگشتن به موقعیت ابتدایی آن استفاده کرد. پیادهسازی سلونوئیدها در رباتها ساده است، که میتوانند حرکت سریع و کوتاه ایجاد کنند.
بر خلاف این حقیقت که این محرکها معمولاً برای ایجاد حرکت خطی مورد استفاده قرار میگیرند، ساختار مکانیکی آنها میتواند حرکت چرخشی القا کند.
موتورهای الکتریکی
موتورهای الکتریکی رایجترین و مهمترین محرکهای قابل دسترس برای ما علاقه مندان به رباتها میباشد. انواع مختلفی از موتورها برای کاربردهای مختلف وجود دارد. در قسمت بعد، مفاهیم موتورها و نحوهی عملکرد آنها را خواهیم آموخت.



